
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2023, Vol. 44 ›› Issue (6): 1820-1828.doi: 10.12382/bgxb.2022.0130
Previous Articles Next Articles
ZHU Qixin1,2,*( ), JIANG Chenyan1, ZHANG Guoping3, ZHU Yonghong4
), JIANG Chenyan1, ZHANG Guoping3, ZHU Yonghong4
Received:2022-03-04
Online:2023-06-30
Contact:
ZHU Qixin
ZHU Qixin, JIANG Chenyan, ZHANG Guoping, ZHU Yonghong. Identification of Mechanical Parameters of Permanent Magnet Servo System Based on Orthogonal Characteristics of Trigonometric Function[J]. Acta Armamentarii, 2023, 44(6): 1820-1828.
Add to citation manager EndNote|Ris|BibTeX
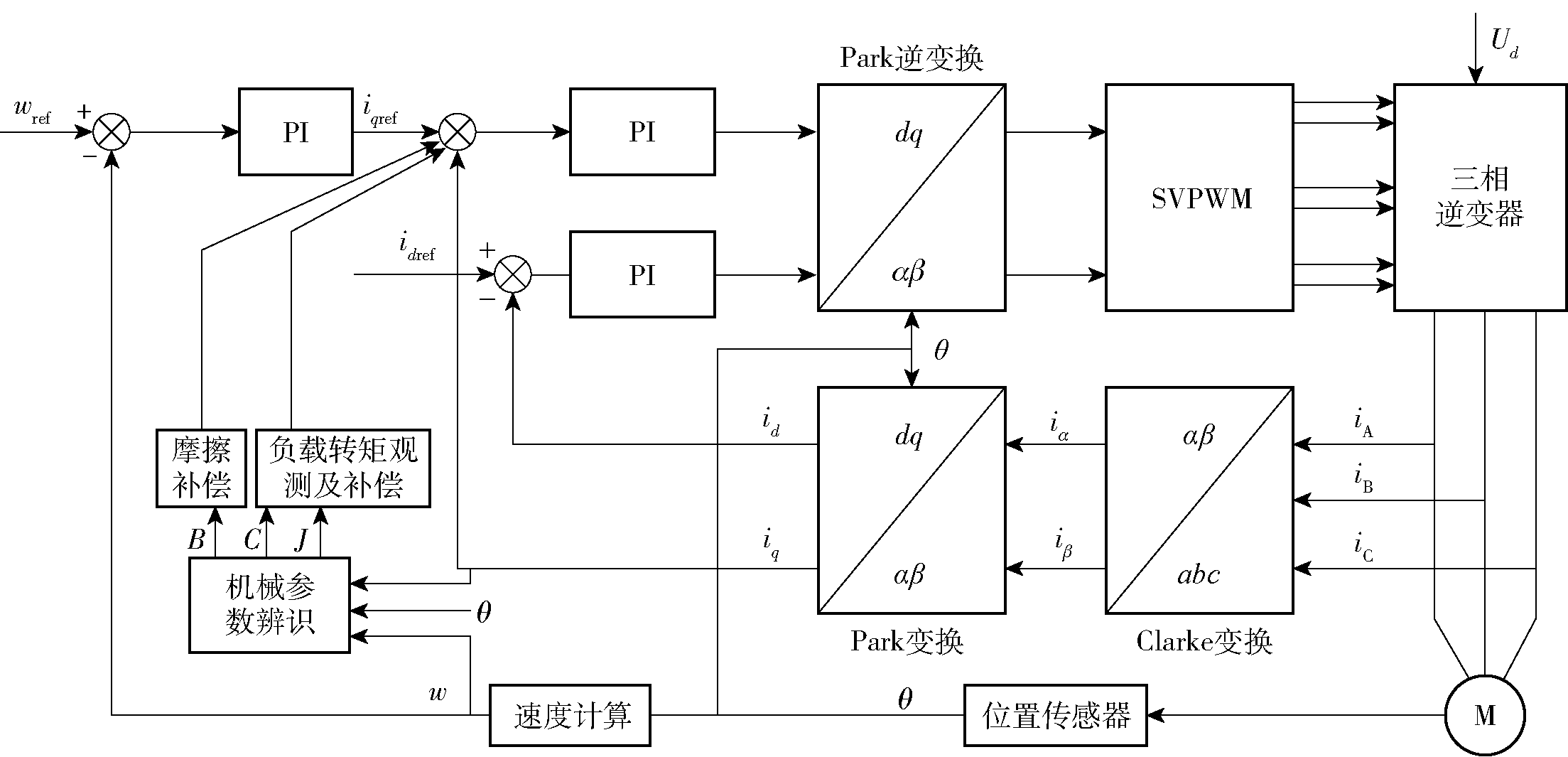
Fig.1 Control block diagram of parameter identification and feedforward compensation
| 标识符 | 数值 |
|---|---|
| Rs/Ω | 1.5 |
| Ld/H | 0.0048 |
| Lq/H | 0.0048 |
| φf/Wb | 0.109 |
| J/(kg·m2) | 2.75×10-4 |
| B/(N·m·s·rad-1) | 0.0012 |
| pn | 4 |
| C/(N·m) | 0.248 |
Table 1 Parameter setting
| 标识符 | 数值 |
|---|---|
| Rs/Ω | 1.5 |
| Ld/H | 0.0048 |
| Lq/H | 0.0048 |
| φf/Wb | 0.109 |
| J/(kg·m2) | 2.75×10-4 |
| B/(N·m·s·rad-1) | 0.0012 |
| pn | 4 |
| C/(N·m) | 0.248 |
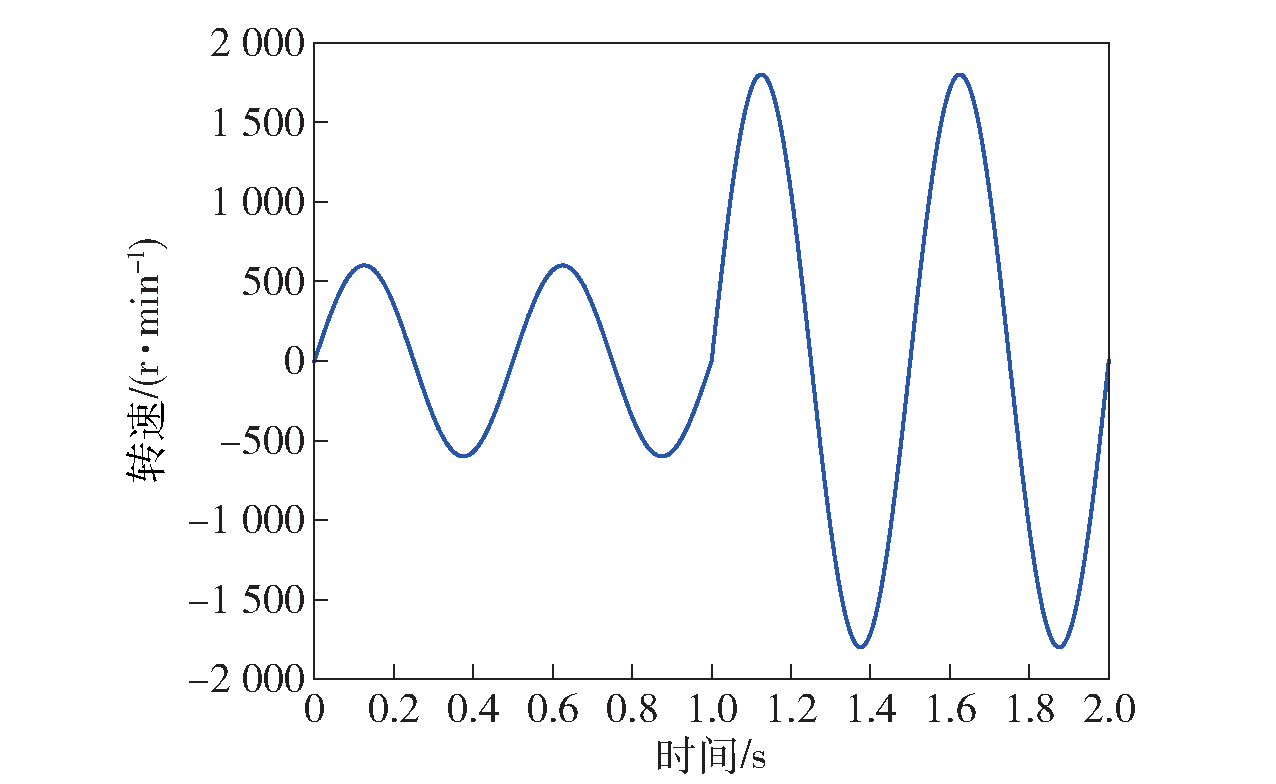
Fig.2 Speed instruction
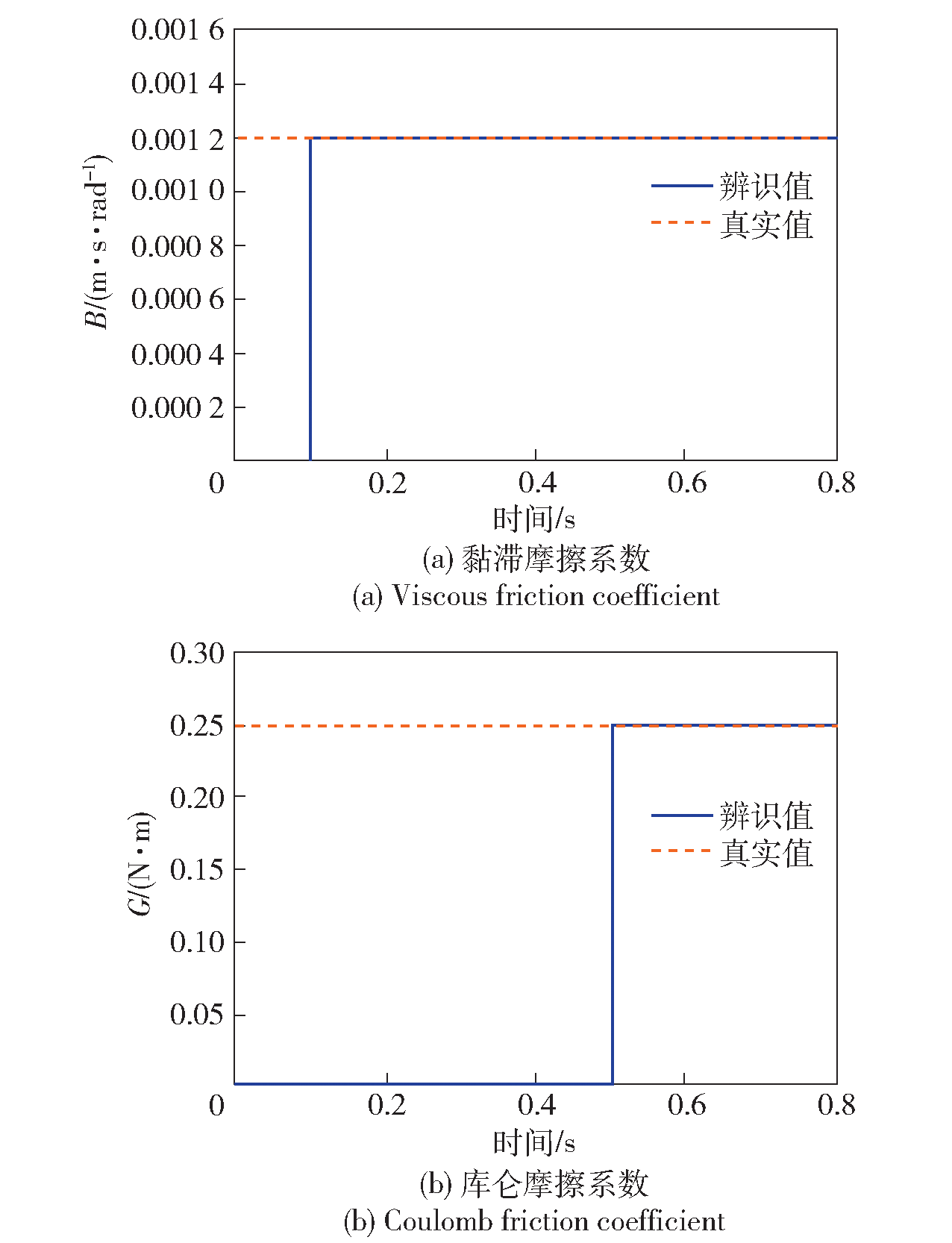
Fig.3 Identification of system friction coefficients
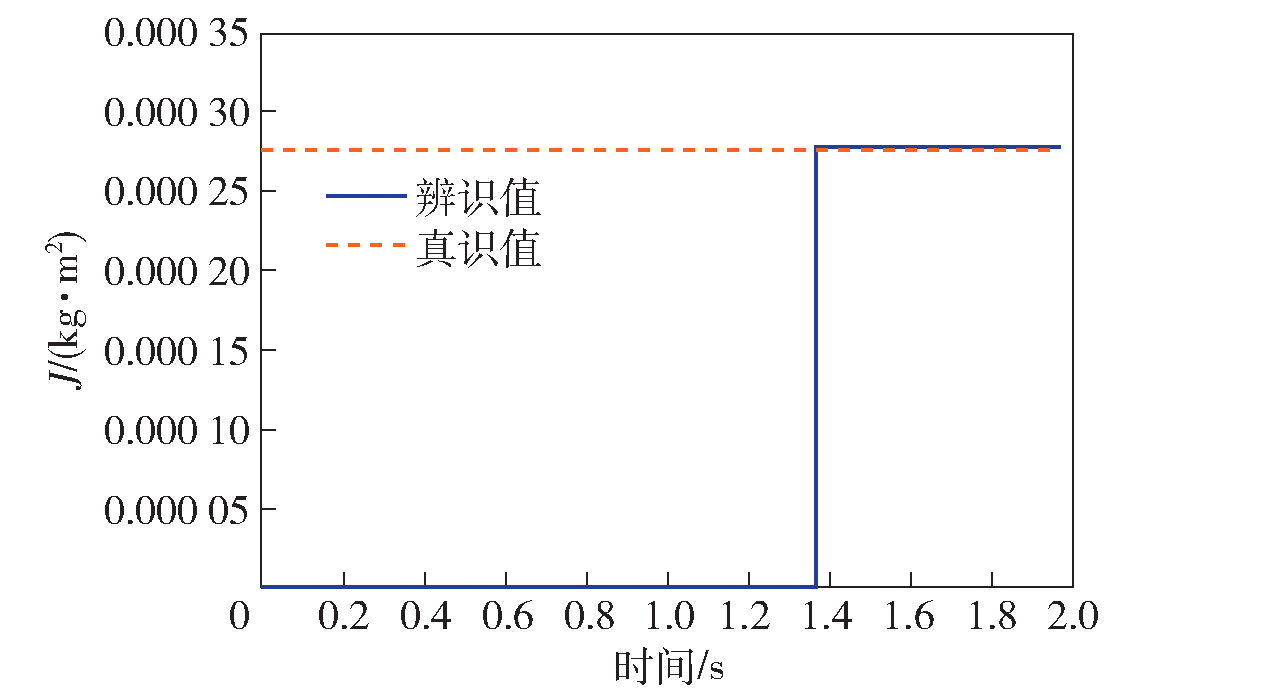
Fig.4 Moment of inertia identification
| 参数 | 辨识值 | 真实值 | 误差/% |
|---|---|---|---|
| J/(kg·m2) | 2.7526×10-4 | 2.75×10-4 | 0.95 |
| B/(N·m·s·rad-1) | 0.001202 | 0.0012 | 0.17 |
| C/(N·m) | 0.2477 | 0.248 | 0.93 |
Table 2 Identification results of mechanical parameters
| 参数 | 辨识值 | 真实值 | 误差/% |
|---|---|---|---|
| J/(kg·m2) | 2.7526×10-4 | 2.75×10-4 | 0.95 |
| B/(N·m·s·rad-1) | 0.001202 | 0.0012 | 0.17 |
| C/(N·m) | 0.2477 | 0.248 | 0.93 |
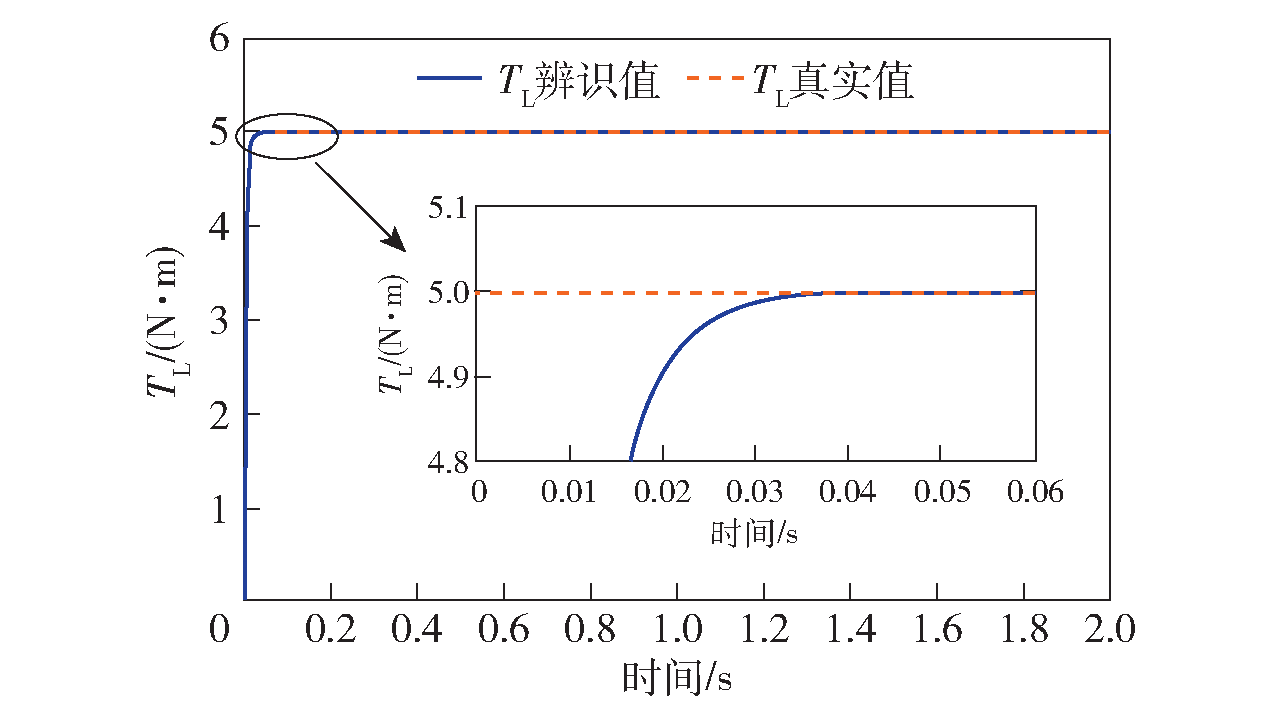
Fig.5 Load torque observation
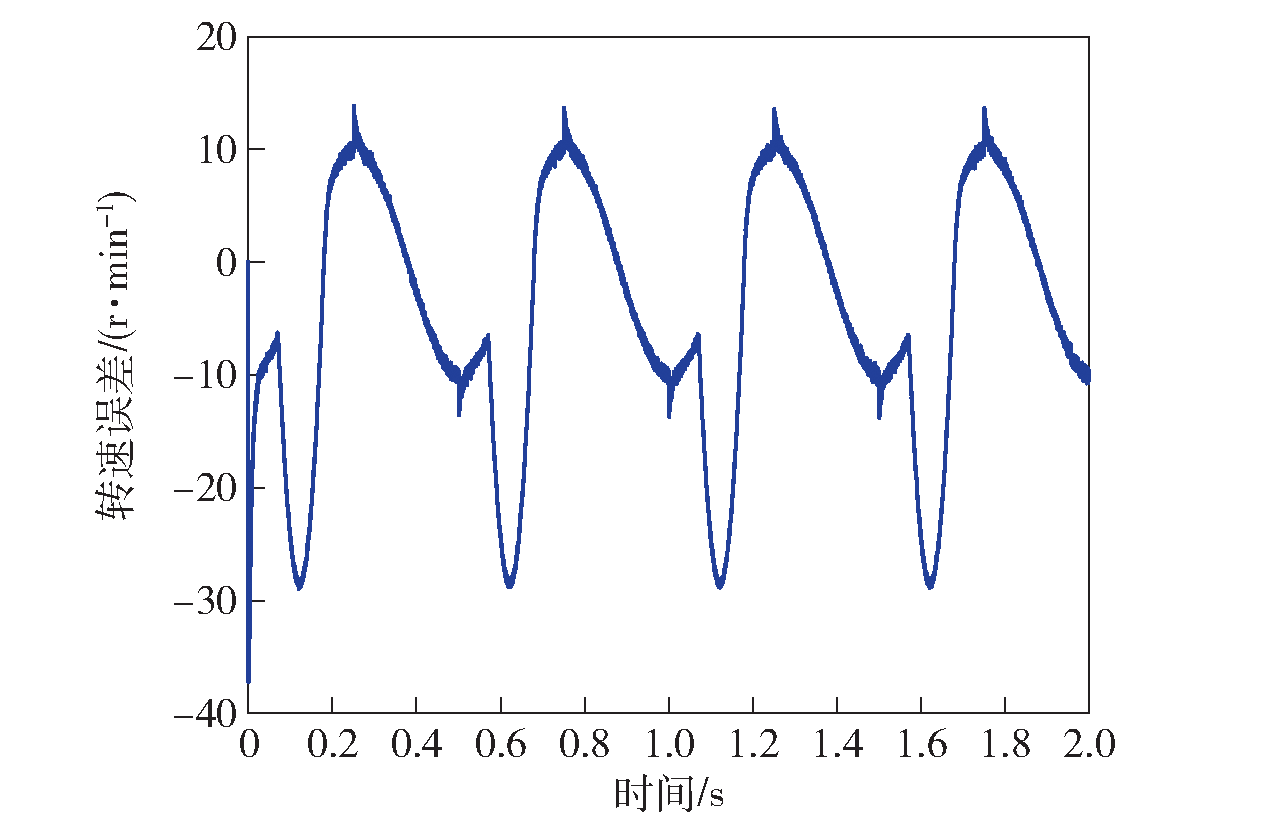
Fig.6 Speed error without feedforward compensation
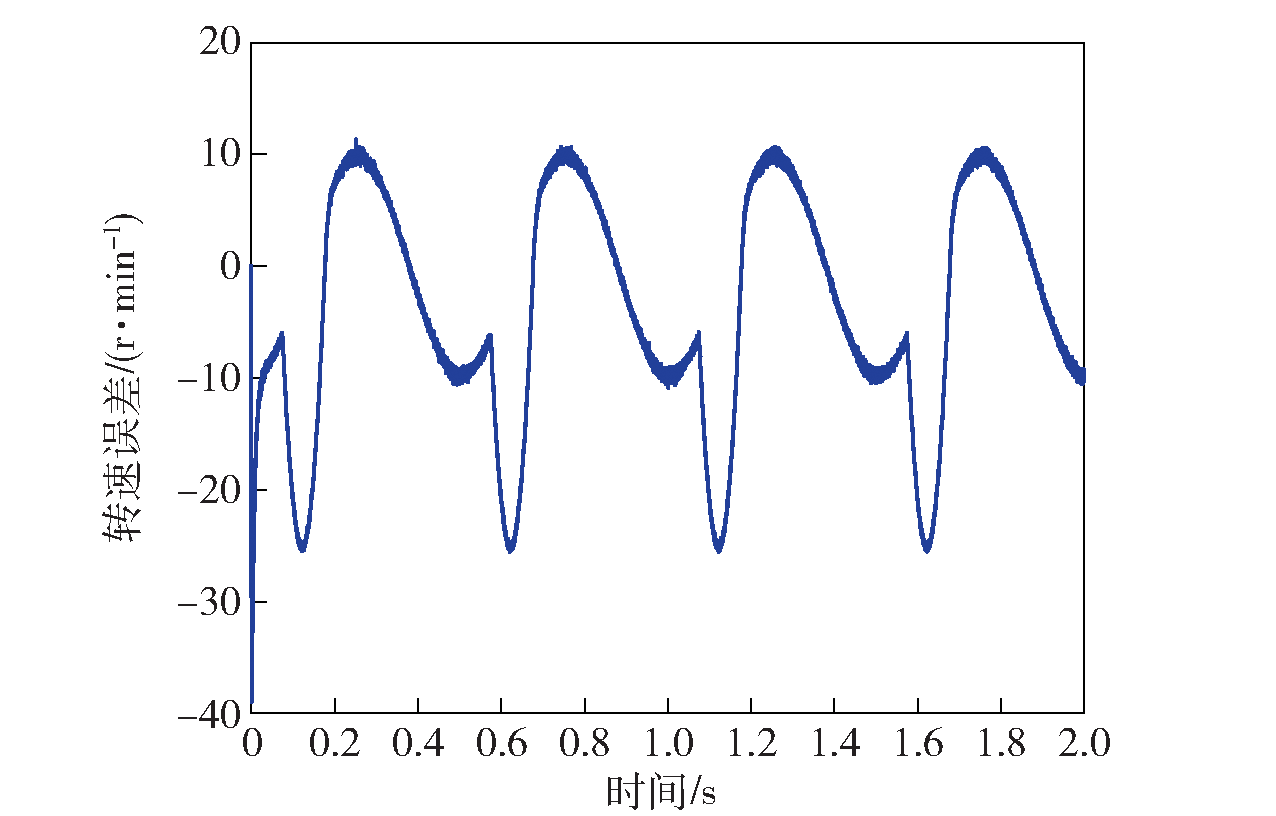
Fig.7 Speed error with friction feedforward compensation
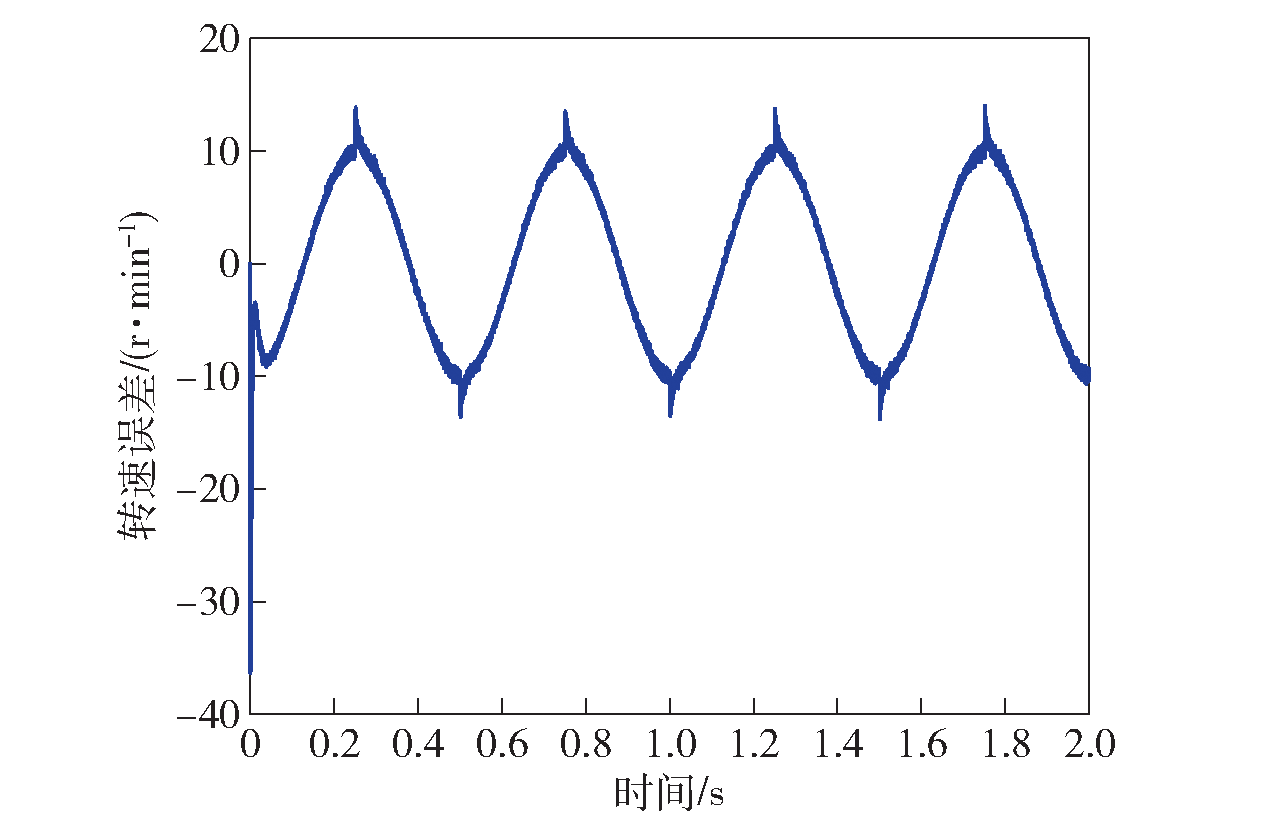
Fig.8 Speed error with load torque feedforward compensation
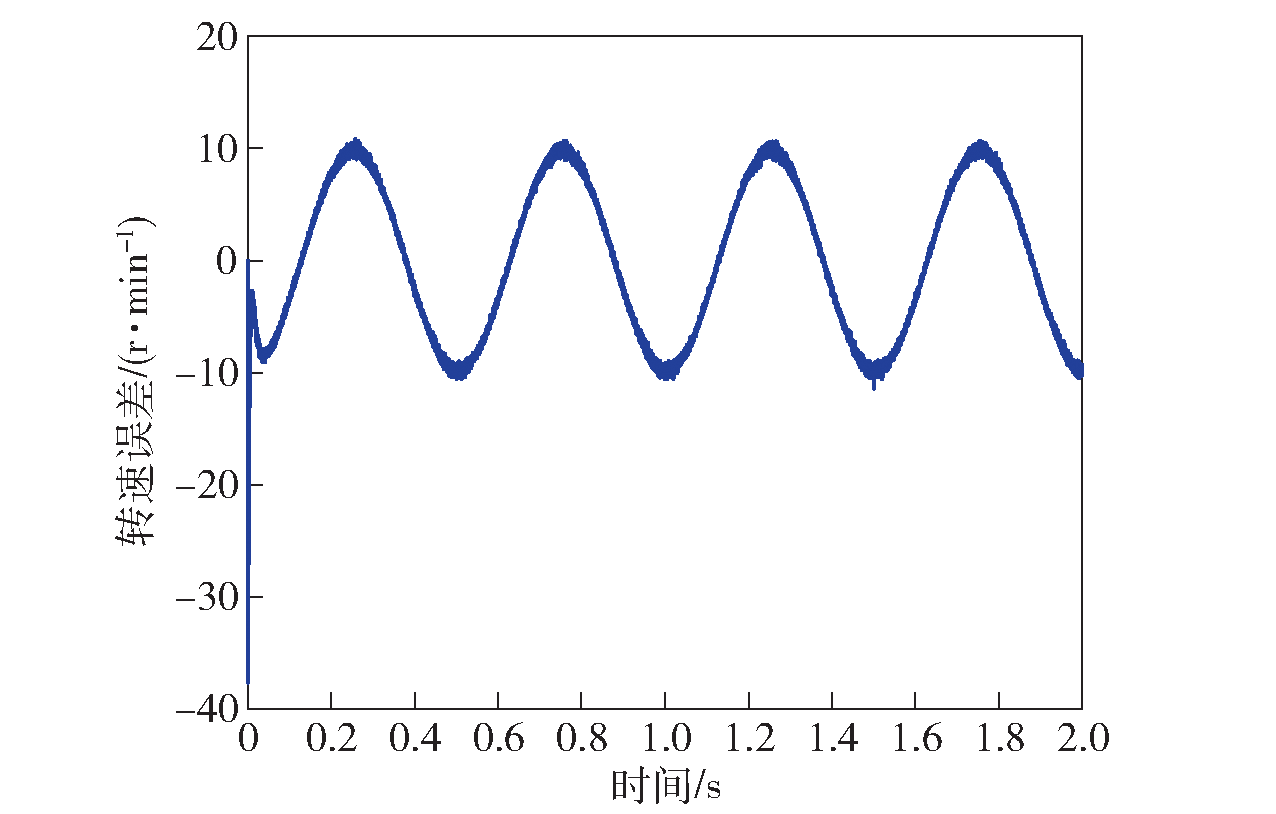
Fig.9 Speed error with load torque and friction feedforward compensation

Fig.10 Experimental platform
| 标识符 | 数值 |
|---|---|
| Rs/Ω | 4.08 |
| Ld/H | 0.00408 |
| Lq/H | 0.00408 |
| 转矩常数/(N·m·A-1) | 0.55 |
| J/(kg·m2) | 0.34×10-4 |
| pn | 5 |
| 转速/(r·min-1) | 3000 |
Table 3 Parameter of the motor
| 标识符 | 数值 |
|---|---|
| Rs/Ω | 4.08 |
| Ld/H | 0.00408 |
| Lq/H | 0.00408 |
| 转矩常数/(N·m·A-1) | 0.55 |
| J/(kg·m2) | 0.34×10-4 |
| pn | 5 |
| 转速/(r·min-1) | 3000 |
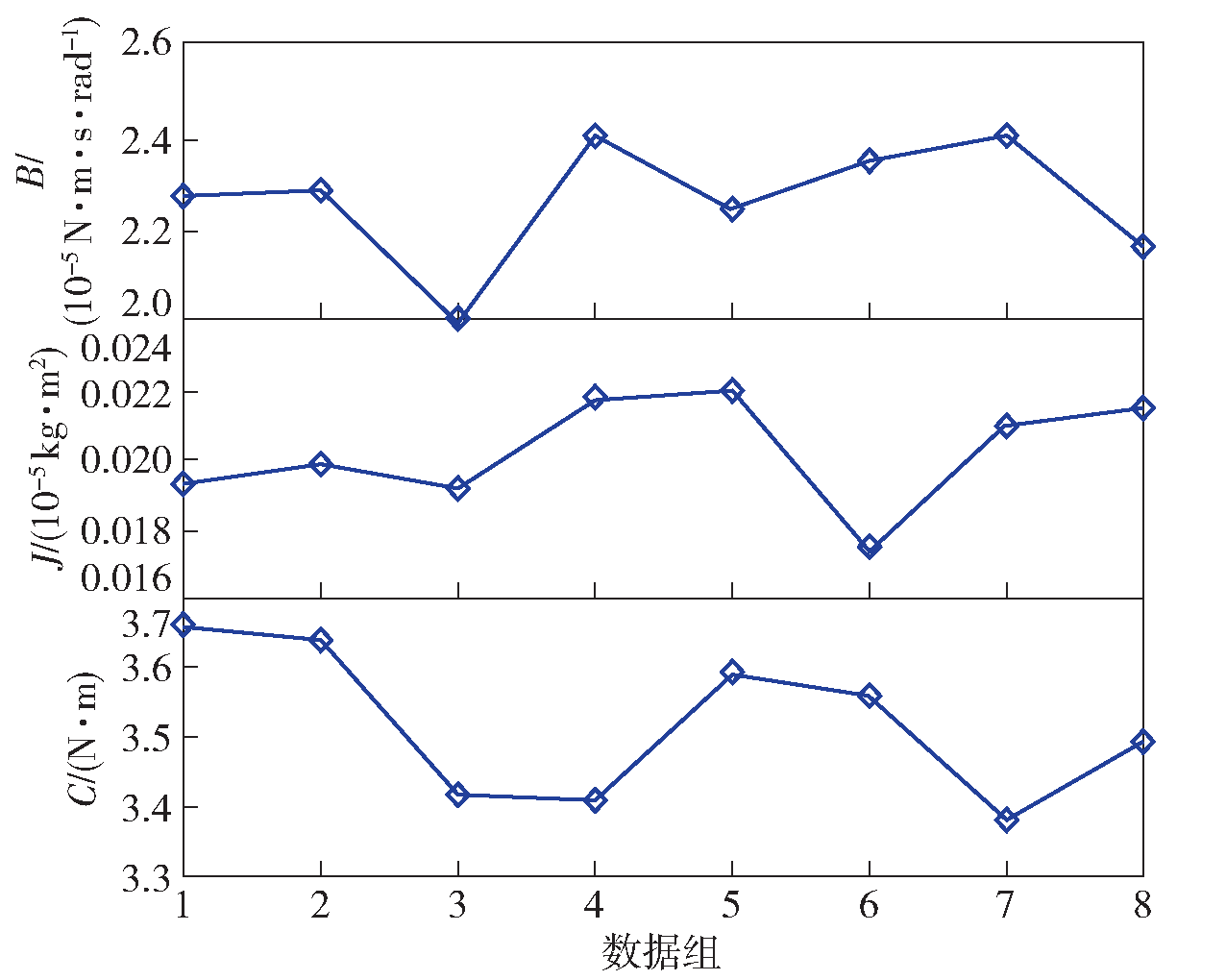
Fig.11 Experimental identification results
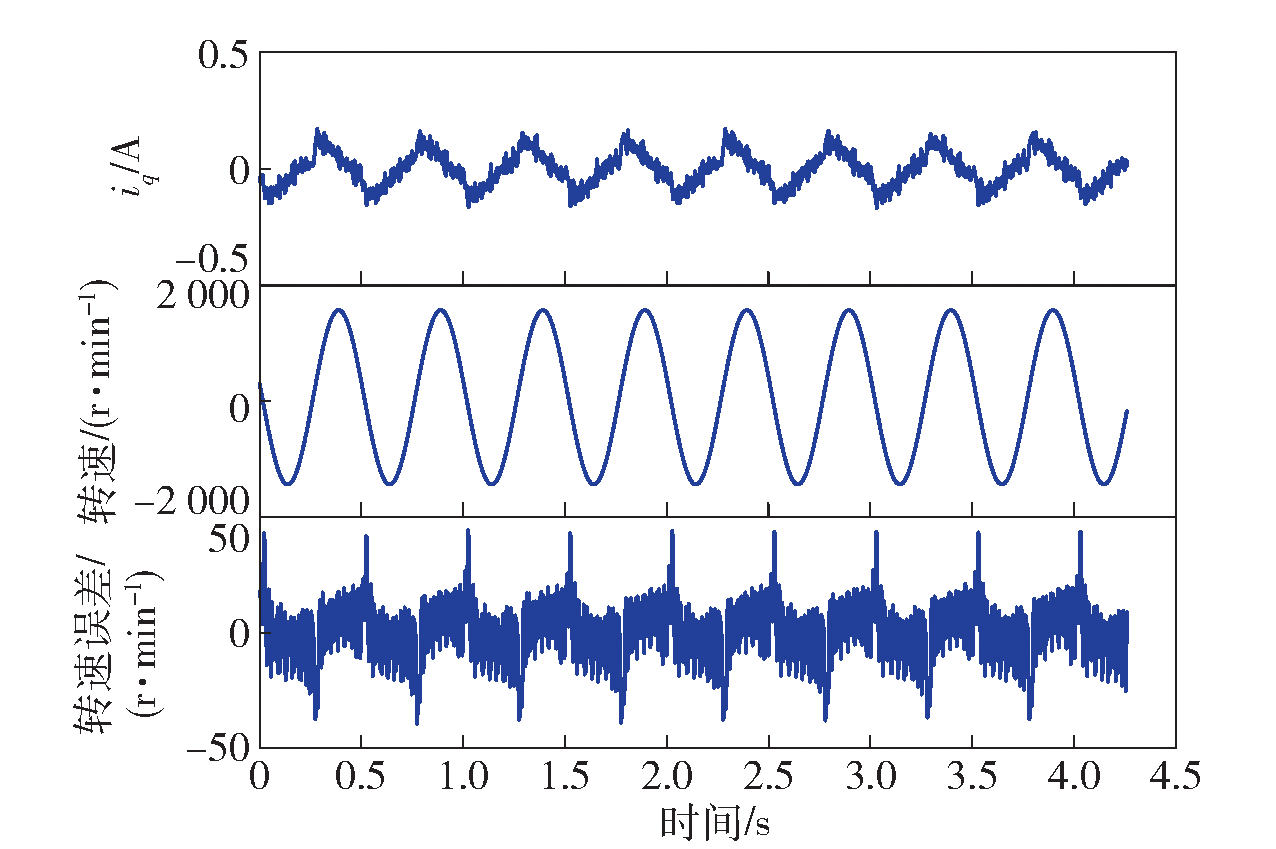
Fig.12 Speed error without feedforward compensation
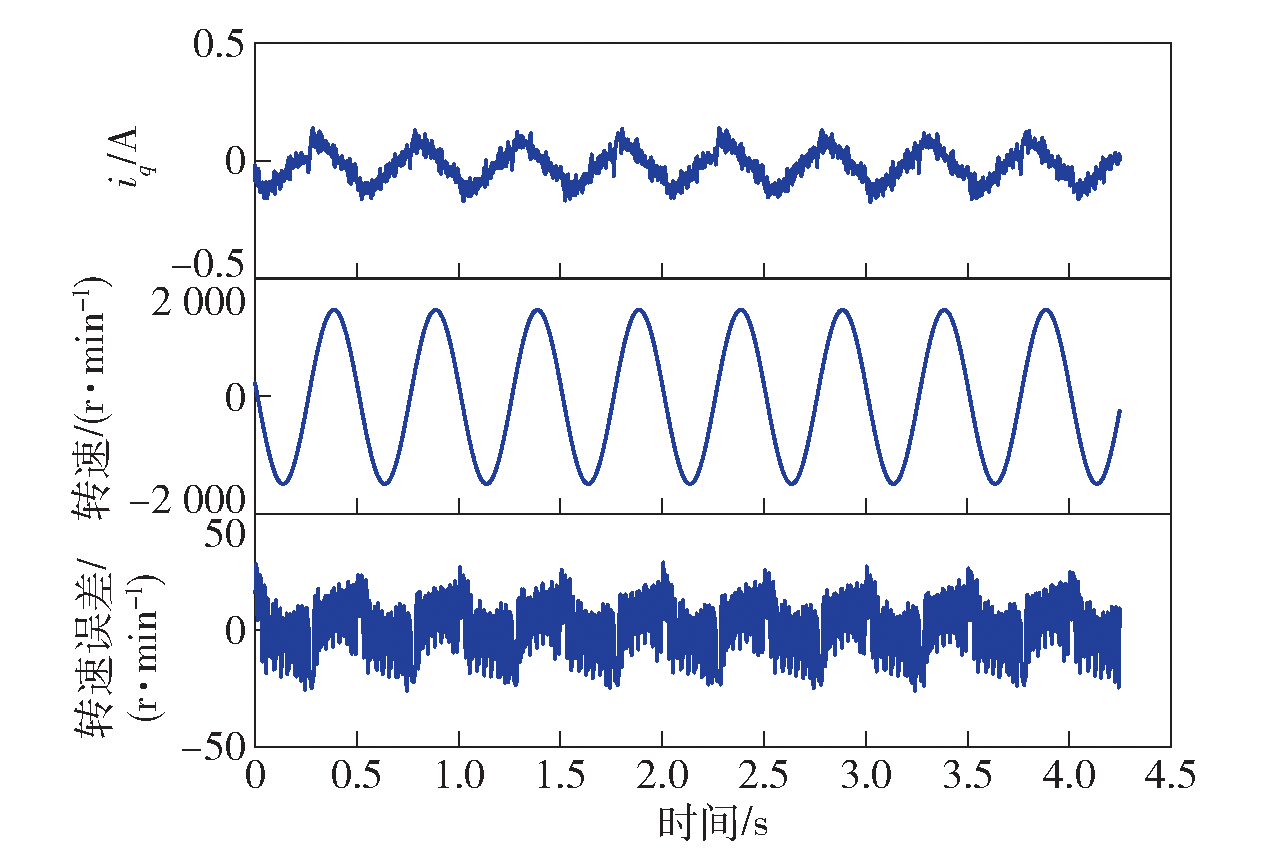
Fig.13 Speed error with feedforward compensation
| [1] |
谷磊. 交流伺服系统中的谐振问题研究[D]. 武汉: 华中科技大学, 2012.
|
|
|
|
| [2] |
刘细平, 胡卫平, 邹永玲, 等. 改进粒子群算法的永磁同步电机多参数辨识[J]. 电机与控制学报, 2020, 24(7):112-120.
|
|
|
|
| [3] |
doi: 10.1016/j.rser.2016.12.027 URL |
| [4] |
王璨, 杨明, 栾添瑞, 等. 双惯量弹性伺服系统外部机械参数辨识综述[J]. 中国电机工程学报, 2016, 36(3): 804-817.
|
|
|
|
| [5] |
doi: 10.4156/ijact URL |
| [6] |
doi: 10.1080/15325000902817218 URL |
| [7] |
马立新, 徐镇乾, 范洪成, 等. PI自整定永磁伺服系统转动惯量的辨识研究[J]. 机电工程, 2015, 32(8):1128-1131.
|
|
|
|
| [8] |
doi: 10.1109/28.148453 URL |
| [9] |
doi: 10.1541/ieejias.117.456 URL |
| [10] |
许文波, 魏泽宇, 孔伟, 等. PMSM伺服系统线性自抗扰控制器的参数整定[J]. 控制理论与应用, 2022, 39(1):165-178.
|
|
|
|
| [11] |
石建飞, 戈宝军, 吕艳玲, 等. 永磁同步电机在线参数辨识方法研究[J]. 电机与控制学报, 2018, 22(3):17-24.
|
|
|
|
| [12] |
doi: 10.3390/a14060173 URL |
| [13] |
范鑫, 孔建寿. 基于离散时间MRAS的交流伺服系统参数辨识[J]. 工业控制计算机, 2021, 34(8):152-155.
|
|
|
|
| [14] |
|
| [15] |
doi: 10.3390/en14010166 URL |
| [16] |
doi: 10.1109/TSP.2012.2190404 URL |
| [17] |
doi: 10.1109/TIE.2015.2512224 URL |
| [18] |
高源. 交流永磁伺服系统参数辨识及参数自整定[D]. 北京: 中国运载火箭技术研究院, 2020.
|
|
|
|
| [19] |
doi: 10.1109/TIE.2009.2024655 URL |
| [20] |
doi: 10.1049/ip-epa:20031009 URL |
| [21] |
doi: 10.1109/TCST.2016.2615090 URL |
| [22] |
doi: 10.1109/TIE.41 URL |
| [23] |
吴春, 郑露华, 支恩. 基于三角函数正交性的永磁伺服系统机械参数辨识方法[J]. 中国电机工程学报, 2022, 42(4):1617-1625.
|
|
|
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||