
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2024, Vol. 45 ›› Issue (S2): 317-328.doi: 10.12382/bgxb.2024.0319
SUN Yujie1,2,3,*( ), SU Bo2,3, DUAN Leyi2,3, JI Chao2,3, YANG Chaonan2,3
), SU Bo2,3, DUAN Leyi2,3, JI Chao2,3, YANG Chaonan2,3
Received:2024-04-24
Online:2024-12-12
Contact:
SUN Yujie
SUN Yujie, SU Bo, DUAN Leyi, JI Chao, YANG Chaonan. A Reconnaissance Task Allocation Algorithm for Air-Ground Heterogeneous Unmanned System[J]. Acta Armamentarii, 2024, 45(S2): 317-328.
Add to citation manager EndNote|Ris|BibTeX
| 参数/变量 | 含义 |
|---|---|
| k | 无人智能体的索引 |
| k0 | 指挥车的索引 |
| KTL | 合成编队中无人侦察智能体的集合 |
| KTX | 合成编队中无人通信中继智能体的集合 |
| K | 合成编队中无人智能体的集合 |
| ok | 智能体k的当前位置 |
| dk | 智能体k执行完所有任务后需返回的位置 |
| m | 带目标的侦察任务 |
| 任务m的最晚执行时间 | |
| Mq | 所有智能体已接受但尚未执行的侦察任务集合 |
| Mn | 新收到的侦察任务集合 |
| MZC | 所有侦察任务的集合,MZC=Mn∪Mq |
| i,j | 位置的索引 |
| tli | 位置i的最晚访问时间 |
| (i) | 智能体k在侦察位置i可侦察到的目标的集合 |
| (m) | 智能体k能够侦察到目标m的备选侦察位置的集合 |
| 指挥车的通信距离 | |
| 智能体的通信距离 | |
| 备选侦察位置与指挥车之间的通信距离 | |
| (i) | 智能体k在位置i执行侦察任务时所需要建立通信中继的位置 |
| 智能体k的侦察位置备选集 | |
| 智能体k侦察位置备选集中超出指挥车通信范围的备选侦察位置 | |
| STX | 通信中继位置备选集 |
| 表示智能体k是否选择访问位置i,若是则 =1,否则 =0 | |
| 表示智能体k访问位置i的预计时间 | |
| 表示智能体k的空余时间 | |
| t | 表示智能体k到访问为止i,j的时间 |
| 表示从智能体k是否选择路径(i,j),若是则 ,否则 =0 | |
| 表示智能体k侦察位置i到通信中继位置j的距离 | |
| 对智能体k访问位置超出最晚访问时间的惩罚值 | |
| μt | 时间惩罚值在目标函数中的权重系数 |
| μl | 行驶里程费用在目标函数中的权重系数 |
| 智能体k的剩余续航里程 |
Table 1 Parameter andvariable list
| 参数/变量 | 含义 |
|---|---|
| k | 无人智能体的索引 |
| k0 | 指挥车的索引 |
| KTL | 合成编队中无人侦察智能体的集合 |
| KTX | 合成编队中无人通信中继智能体的集合 |
| K | 合成编队中无人智能体的集合 |
| ok | 智能体k的当前位置 |
| dk | 智能体k执行完所有任务后需返回的位置 |
| m | 带目标的侦察任务 |
| 任务m的最晚执行时间 | |
| Mq | 所有智能体已接受但尚未执行的侦察任务集合 |
| Mn | 新收到的侦察任务集合 |
| MZC | 所有侦察任务的集合,MZC=Mn∪Mq |
| i,j | 位置的索引 |
| tli | 位置i的最晚访问时间 |
| (i) | 智能体k在侦察位置i可侦察到的目标的集合 |
| (m) | 智能体k能够侦察到目标m的备选侦察位置的集合 |
| 指挥车的通信距离 | |
| 智能体的通信距离 | |
| 备选侦察位置与指挥车之间的通信距离 | |
| (i) | 智能体k在位置i执行侦察任务时所需要建立通信中继的位置 |
| 智能体k的侦察位置备选集 | |
| 智能体k侦察位置备选集中超出指挥车通信范围的备选侦察位置 | |
| STX | 通信中继位置备选集 |
| 表示智能体k是否选择访问位置i,若是则 =1,否则 =0 | |
| 表示智能体k访问位置i的预计时间 | |
| 表示智能体k的空余时间 | |
| t | 表示智能体k到访问为止i,j的时间 |
| 表示从智能体k是否选择路径(i,j),若是则 ,否则 =0 | |
| 表示智能体k侦察位置i到通信中继位置j的距离 | |
| 对智能体k访问位置超出最晚访问时间的惩罚值 | |
| μt | 时间惩罚值在目标函数中的权重系数 |
| μl | 行驶里程费用在目标函数中的权重系数 |
| 智能体k的剩余续航里程 |
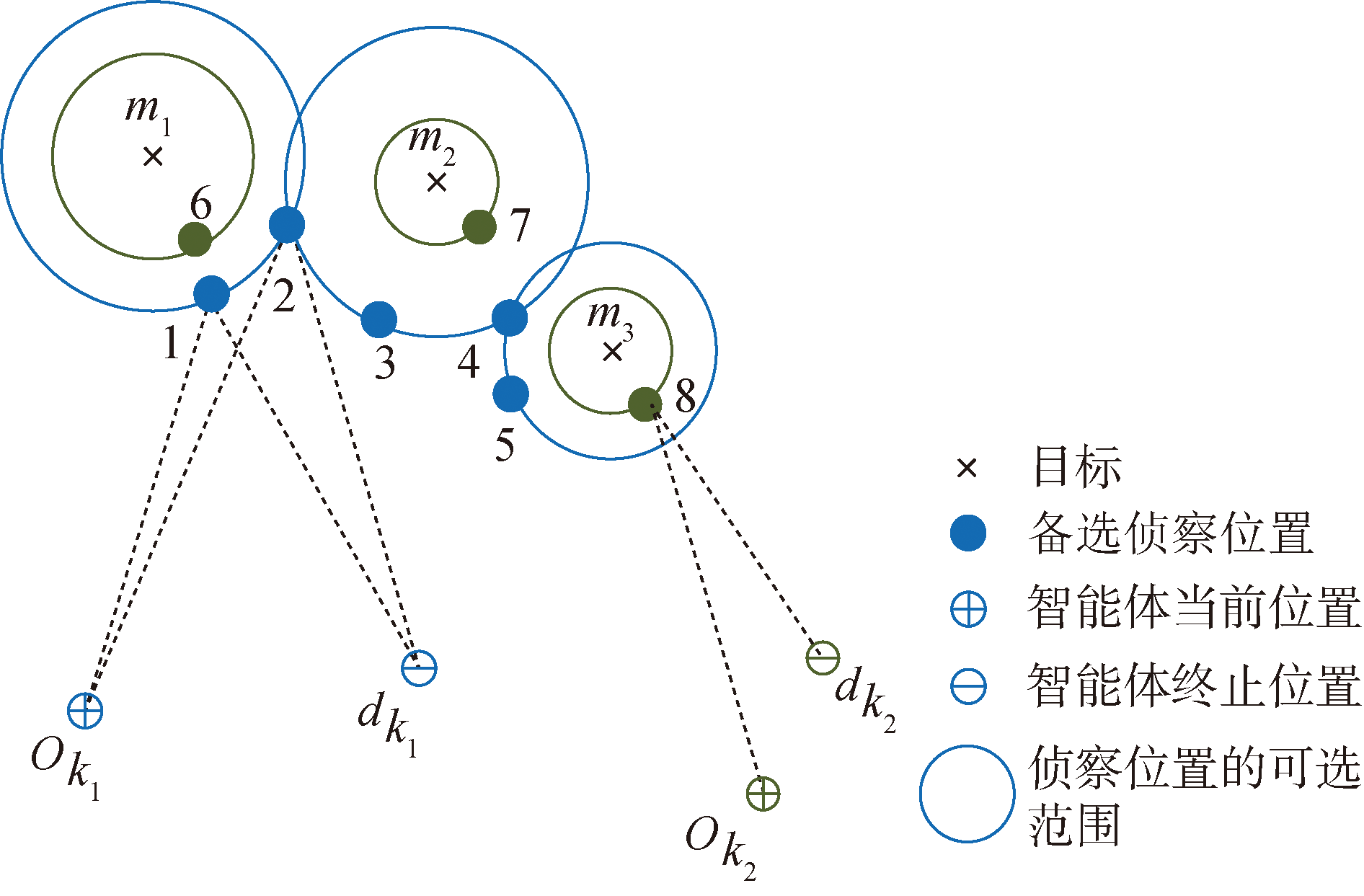
Fig.1 Illustration of reconnaissance position alternate set
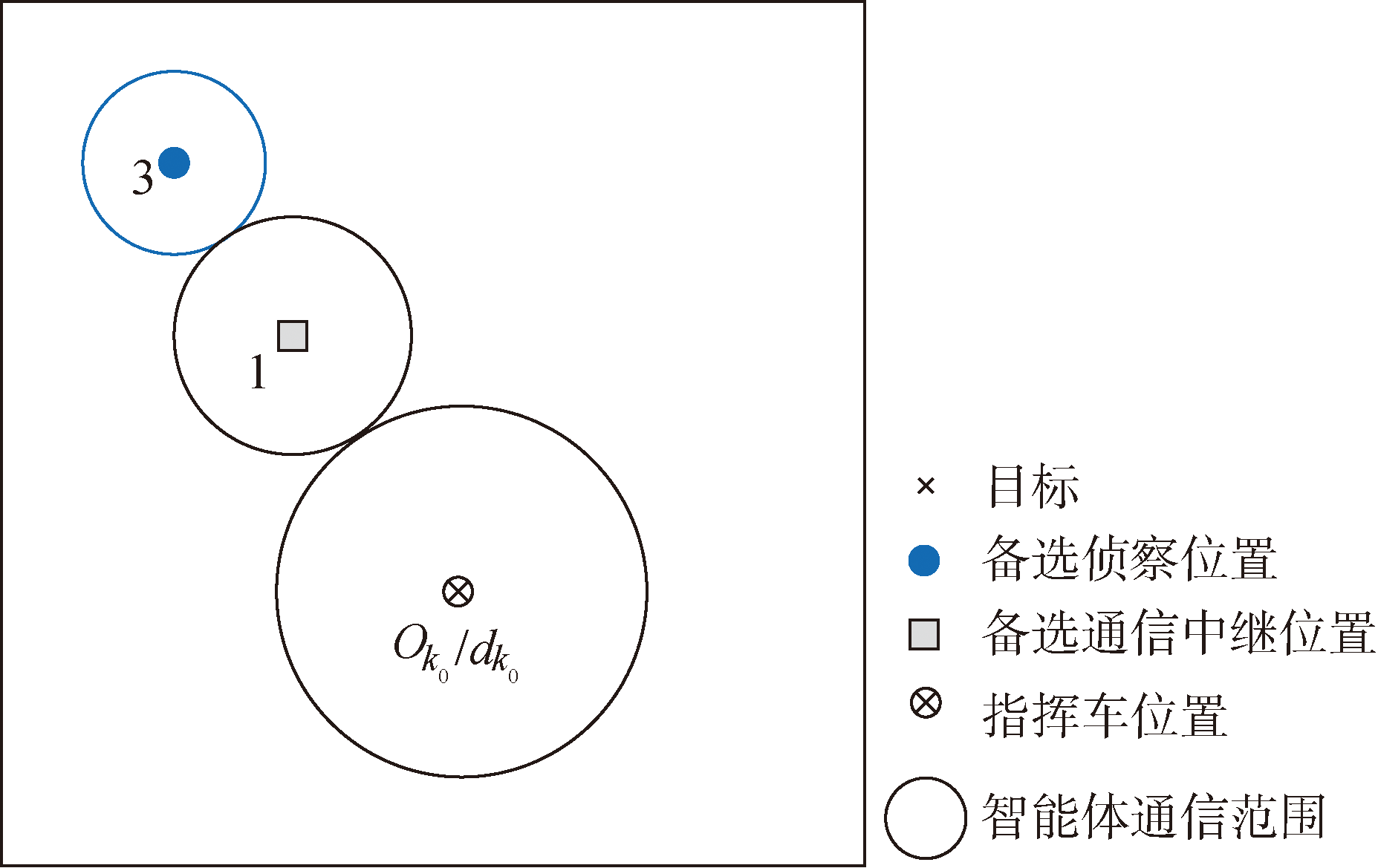
Fig.2 Illustration of communication relay position alternate set
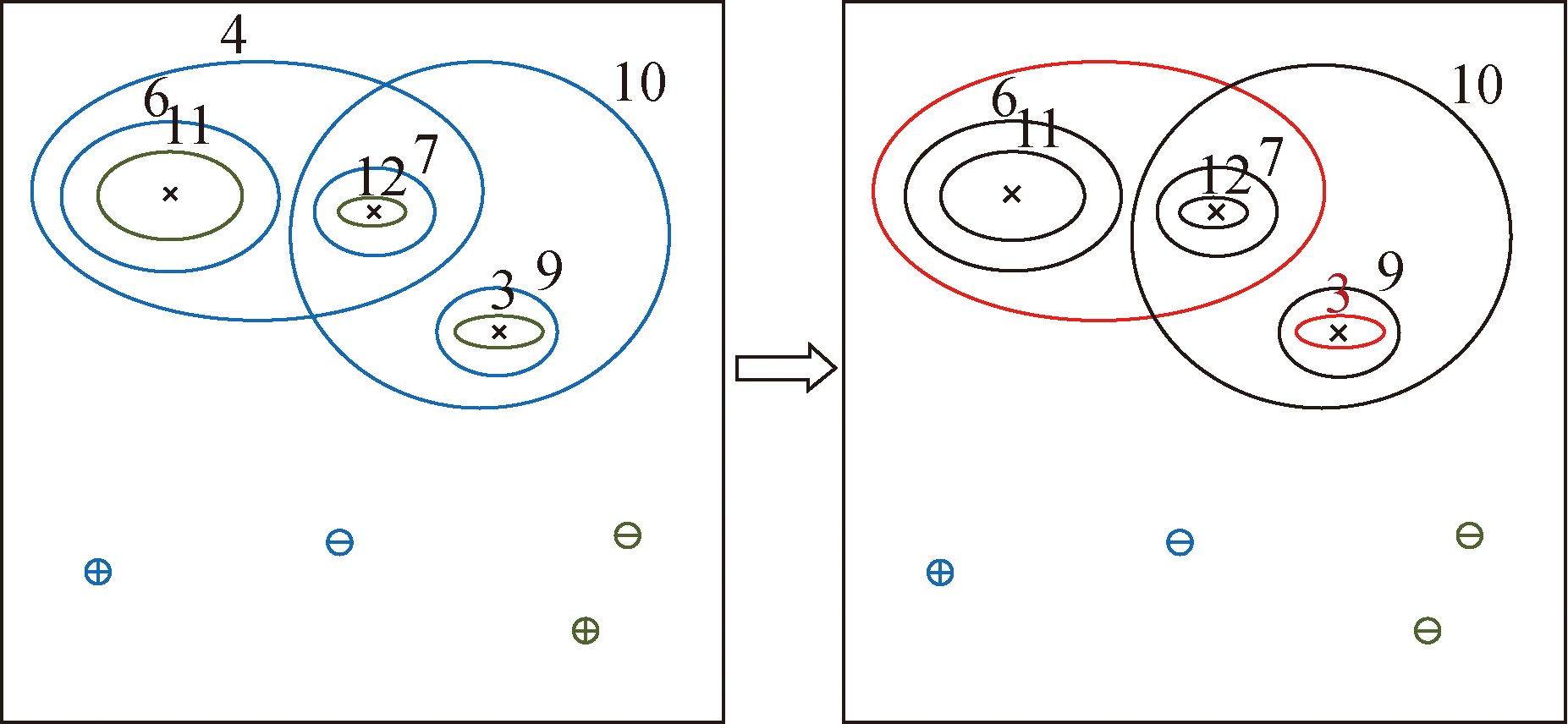
Fig.3 Illustration of set covering problem
| 目标编号 | 位置/km | 任务最晚执行时间/min |
|---|---|---|
| 0 | (9.796,1.797) | 8 |
| 1 | (0.342,4.638) | 10 |
| 2 | (10.208,9.224) | 18 |
| 3 | (1.026,9.717) | 20 |
| 4 | (7.78,9.436) | 28 |
| 5 | (9.82,8.957) | 28 |
| 6 | (6.46,1.884) | 28 |
| 7 | (10.834,3.814) | 31 |
| 8 | (9.282,10.343) | 33 |
| 9 | (5.505,7.088) | 36 |
Table 2 List of reconnaissance task
| 目标编号 | 位置/km | 任务最晚执行时间/min |
|---|---|---|
| 0 | (9.796,1.797) | 8 |
| 1 | (0.342,4.638) | 10 |
| 2 | (10.208,9.224) | 18 |
| 3 | (1.026,9.717) | 20 |
| 4 | (7.78,9.436) | 28 |
| 5 | (9.82,8.957) | 28 |
| 6 | (6.46,1.884) | 28 |
| 7 | (10.834,3.814) | 31 |
| 8 | (9.282,10.343) | 33 |
| 9 | (5.505,7.088) | 36 |
| 侦察智能体 | 位置/km | 剩余续航 里程/km | 既有任务序列 |
|---|---|---|---|
| 侦察无人车1 | (4.166,2.596) | 22 | 目标0,1 |
| 侦察无人车2 | (2.394,4.703) | 35 | 目标2 |
| 侦察无人机 | (0.863,1.719) | 21 | 目标3 |
Table 3 State of reconnaissance agents
| 侦察智能体 | 位置/km | 剩余续航 里程/km | 既有任务序列 |
|---|---|---|---|
| 侦察无人车1 | (4.166,2.596) | 22 | 目标0,1 |
| 侦察无人车2 | (2.394,4.703) | 35 | 目标2 |
| 侦察无人机 | (0.863,1.719) | 21 | 目标3 |
| 通信中继智能体 | 位置/km | 剩余续航里程/km |
|---|---|---|
| 通信无人机1 | (3.544,5.858) | 13 |
| 通信无人机2 | (4.436,4.967) | 41 |
Table 4 State of communication relay agents
| 通信中继智能体 | 位置/km | 剩余续航里程/km |
|---|---|---|
| 通信无人机1 | (3.544,5.858) | 13 |
| 通信无人机2 | (4.436,4.967) | 41 |
| 侦察智能体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 目标编号 | 第2个任务 位置/km | 目标编号 | ||
| 侦察无人车1 | (4.845, 2.499) | 目标0,1, 6,9 | (6.526, 6.170) | 目标2,4, 5,7,8 | |
| 侦察无人车2 | (2.394, 4.703) | 目标3 | |||
| 侦察无人机 | |||||
Table 5 Reconnaissance agent task sequence of the proposed dispatching algorithm
| 侦察智能体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 目标编号 | 第2个任务 位置/km | 目标编号 | ||
| 侦察无人车1 | (4.845, 2.499) | 目标0,1, 6,9 | (6.526, 6.170) | 目标2,4, 5,7,8 | |
| 侦察无人车2 | (2.394, 4.703) | 目标3 | |||
| 侦察无人机 | |||||
| 通信中继 智能体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 所通信中 继的智能体 及其任务 位置/km | 第2个任务 位置/km | 所通信中 继的智能 体及其任务 位置/km | ||
| 通信无人机1 | |||||
| 通信无人机2 | (3.263, 3.085) | 侦察无人车1 (6.526,6.170) | |||
Table 6 Communication relay agent task sequence of the proposed dispatching algorithm
| 通信中继 智能体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 所通信中 继的智能体 及其任务 位置/km | 第2个任务 位置/km | 所通信中 继的智能 体及其任务 位置/km | ||
| 通信无人机1 | |||||
| 通信无人机2 | (3.263, 3.085) | 侦察无人车1 (6.526,6.170) | |||
| 侦察智能体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 目标编号 | 第2个任务 位置/km | 目标编号 | ||
| 侦察无人车1 | (4.845, 2.499) | 目标0,1, 6,9 | (5.915, 2.915) | 目标7 | |
| 侦察无人车2 | (5.880, 6.719) | 目标2,4, 5,8 | |||
| 侦察无人机 | (0.883, 2.718) 目标3 | ||||
Table 7 Reconnaissance agent task sequence of the baseline dispatching algorithm
| 侦察智能体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 目标编号 | 第2个任务 位置/km | 目标编号 | ||
| 侦察无人车1 | (4.845, 2.499) | 目标0,1, 6,9 | (5.915, 2.915) | 目标7 | |
| 侦察无人车2 | (5.880, 6.719) | 目标2,4, 5,8 | |||
| 侦察无人机 | (0.883, 2.718) 目标3 | ||||
| 通信中继 智能体体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 所通信中 继的智能体 及其任务 位置/km | 第2个任务 位置/km | 所通信中 继的智能体 及其任务 位置/km | ||
| 通信无人机1 | (2.940, 3.359) | 侦察无人车2 (5.880,6.719) | |||
| 通信无人机2 | |||||
Table 8 Communication relay agent task sequence of the baseline dispatching algorithm
| 通信中继 智能体体 | 任务序列 | ||||
|---|---|---|---|---|---|
| 第1个任务 位置/km | 所通信中 继的智能体 及其任务 位置/km | 第2个任务 位置/km | 所通信中 继的智能体 及其任务 位置/km | ||
| 通信无人机1 | (2.940, 3.359) | 侦察无人车2 (5.880,6.719) | |||
| 通信无人机2 | |||||
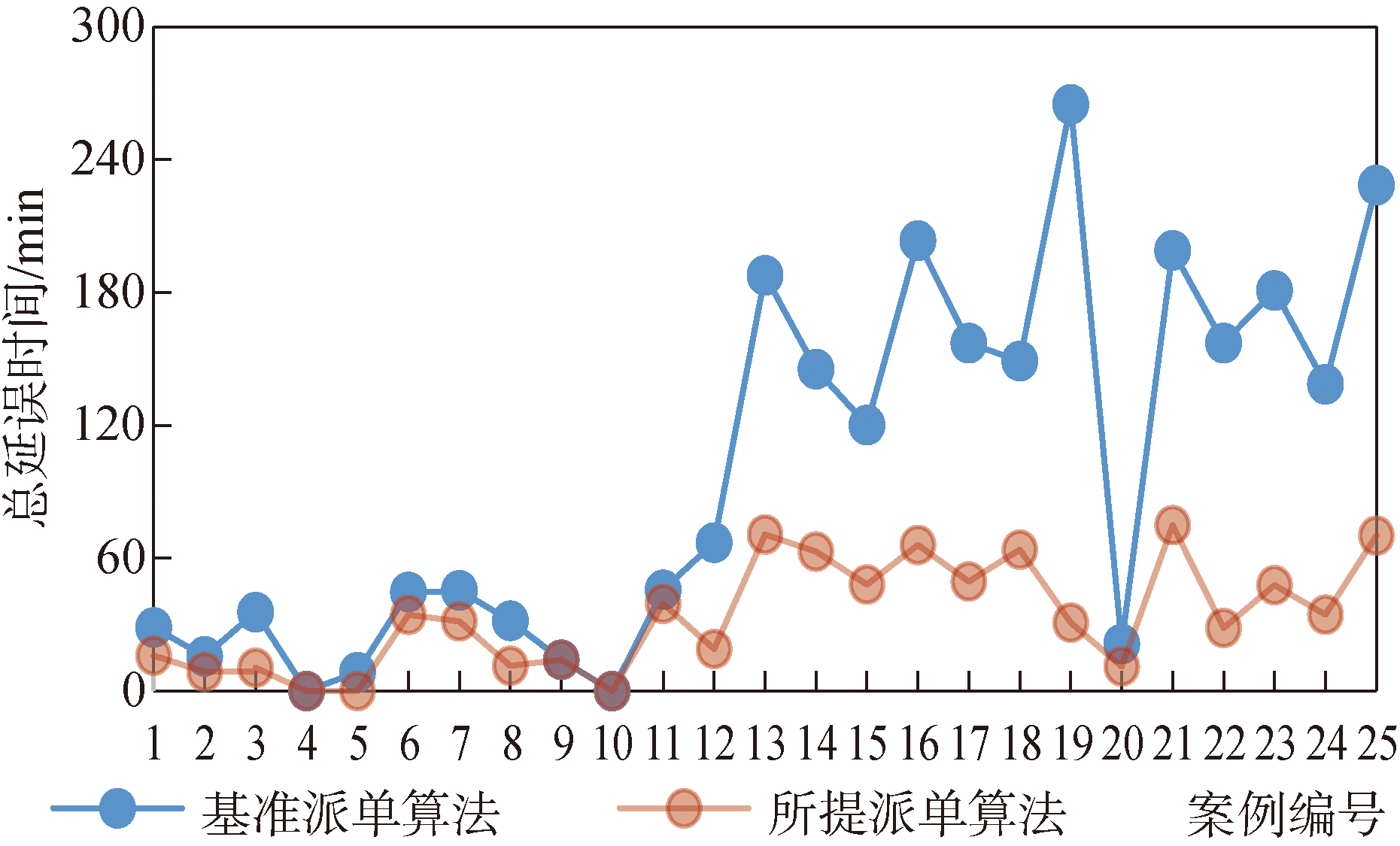
Fig.4 Comparison of the total delay times
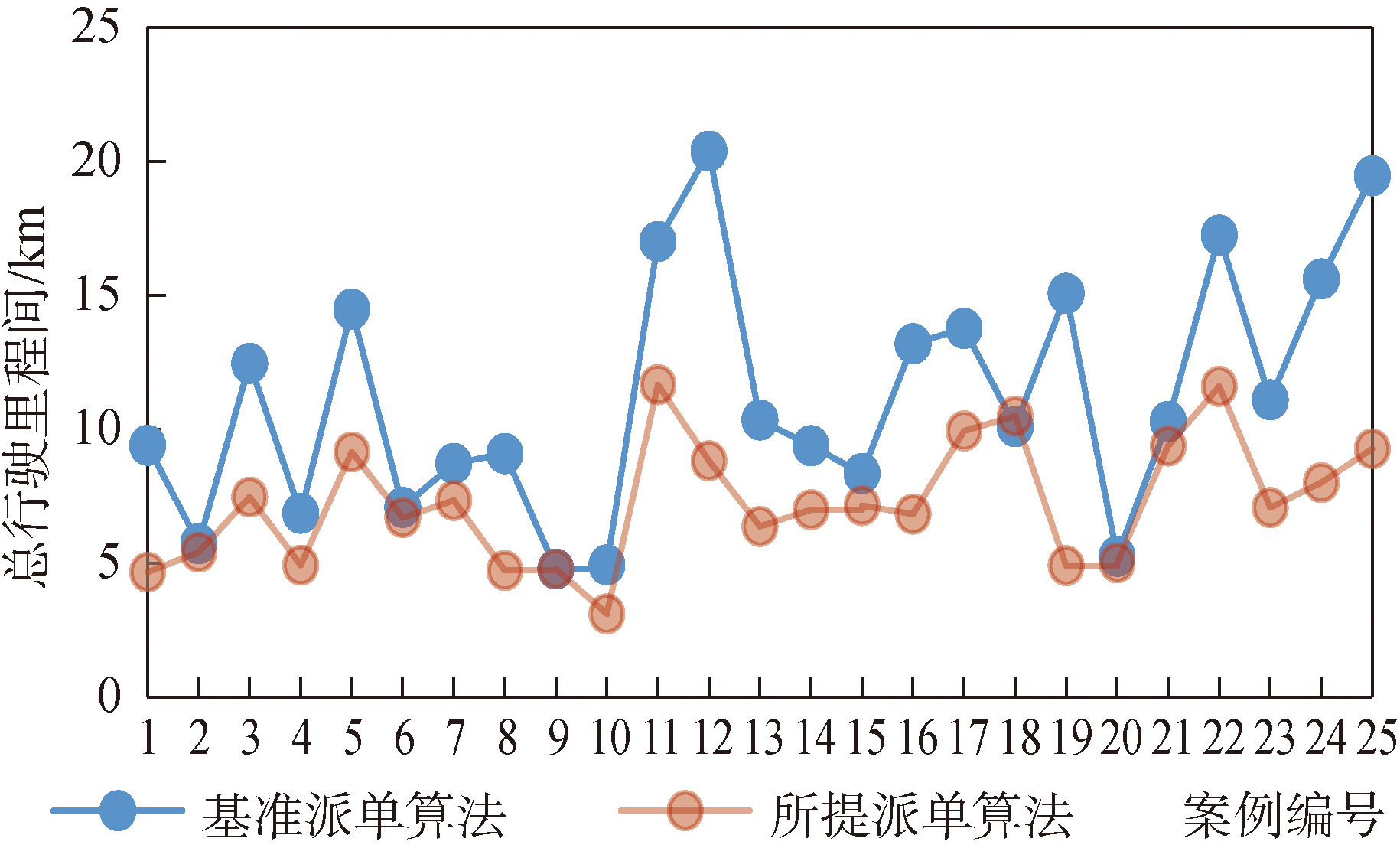
Fig.5 Comparison of the total travelling distances
| [1] |
毕文豪, 张梦琦, 高飞, 等. 无人机集群任务分配技术研究综述[J]. 系统工程与电子技术, 2024, 46(3):922-934.
doi: 10.12305/j.issn.1001-506X.2024.03.18 |
|
doi: 10.12305/j.issn.1001-506X.2024.03.18 |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
沈林成, 陈璟, 王楠. 飞行器任务规划技术综述[J]. 航空学报, 2014, 35(3):593-606.
doi: 10.7527/S1000-6893.2013.0500 |
|
doi: 10.7527/S1000-6893.2013.0500 |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
范博洋, 赵高鹏, 薄煜明, 等. 多目标空地异构无人装备协同任务分配方法[J]. 兵工学报, 2023, 44(6):1564-1575.
doi: 10.12382/bgxb.2022.0095 |
|
doi: 10.12382/bgxb.2022.0095 |
|
| [12] |
张国辉, 张雅楠, 高昂, 等. 空地异构无人装备侦察任务规划方法[J]. 系统仿真学报, 2024, 36(2):497-510.
doi: 10.16182/j.issn1004731x.joss.23-0103 |
|
doi: 10.16182/j.issn1004731x.joss.23-0103 |
|
| [13] |
张雷, 王道波, 高宇辉, 等. 基于粒子群优化的无人战斗机编队任务协调方法研究[J]. 系统工程与电子技术, 2009, 31(2):439-442.
|
|
|
|
| [14] |
田震, 王晓芳. 基于多基因遗传算法的异构多无人机协同任务分配[J]. 飞行力学, 2019, 37(1):39-44.
|
|
|
|
| [15] |
康旭超, 何广军, 陈峰, 等. 求解无人机ISR任务分配问题的离散萤火虫算法[J]. 弹箭与制导学报, 2019, 39(5):131-134,138.
|
|
|
|
| [16] |
许可, 宫华, 秦新立, 等. 基于分布式拍卖算法的多无人机分组任务分配[J]. 信息与控制, 2018, 47(3):341-346.
|
|
|
|
| [17] |
赵晓林, 魏兆恬, 赵博欣, 等. 异构资源类型下多无人机任务分配[J]. 国防科技大学学报, 2023, 45(4):232-242.
|
|
|
|
| [18] |
吕晔, 周锐, 李兴, 等. 基于多轮次分布式拍卖的异构多任务分配算法[J/OL]. 北京航空航天大学学报, 2023(2023-08-03)[2024-04-15].https://doi.org/10.13700/j.bh.1001-5965.2023.0156.
|
|
|
|
| [19] |
竺殊荣. 动态环境下多无人机协同任务规划方法[D]. 南京: 南京邮电大学, 2020.
|
|
|
|
| [20] |
龙泓, 魏晨, 段海滨. 基于无监督学习离散鸽群优化的多无人机侦察任务分配[J]. 空军工程大学学报, 2023, 24(5):16-22,32.
|
|
|
|
| [21] |
林萌龙, 陈涛, 任棒棒, 等. 基于多智能体深度强化学习的体系任务分配方法[J]. 指挥与控制学报, 2023, 9(1):93-102.
|
|
|
|
| [22] |
严钰文, 毕文豪, 张安, 等. 基于序列生成对抗网络的无人机集群任务分配方法[J]. 兵工学报, 2023, 44(9):2672-2684.
doi: 10.12382/bgxb.2022.0931 |
|
doi: 10.12382/bgxb.2022.0931 |
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||