
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2023, Vol. 44 ›› Issue (8): 2245-2262.doi: 10.12382/bgxb.2022.0282
杜万闪1, 周洲1,*( ), 拜昱1, 张志林2, 王科雷1
), 拜昱1, 张志林2, 王科雷1
收稿日期:2022-04-20
上线日期:2023-08-30
通讯作者:
基金资助:
DU Wanshan1, ZHOU Zhou1,*(), BAI Yu1, ZHANG Zhilin2, WANG Keilei1
Received:2022-04-20
Online:2023-08-30
摘要:
为精确、完整地描述组合式多体飞行器空间运动位形,基于拟坐标形式的Lagrange方程提出反映相对滚转运动的8自由度组合式三体飞行器动力学建模方法。采用计算流体力学方法建立考虑气动耦合效应的组合式飞行器系统气动力数据库。通过算例将所建模型与ADAMS软件的仿真结果进行对比,验证所建模型的准确性。在此基础上,进行配平方案及飞行力学特性研究,分析比较飞行器在不同配平状态的动力学特性,并基于串级PID控制方法进行增稳控制研究。研究结果表明:所建模型有效反映了组合式飞行器的相对运动;在给定配平方案及飞行工况后,该构型飞行器存在“对称下反”和“对称上反”两个配平状态,在两个状态下的相对滚转运动静稳定性显著不同;除了传统飞行力学模态,该构型飞行器还存在由相对滚转运动主导的4个新生运动模态,按运动特性可分为复合对称运动和复合反对称运动两类;针对在无控状态下该构型飞行器无法长期保持稳定飞行的问题,所提增稳控制方案合理有效,可以快速镇定发散的飞行力学系统;所提建模方法和增稳控制方案可为多体飞行器设计分析提供指导和参考。
中图分类号:
杜万闪, 周洲, 拜昱, 张志林, 王科雷. 组合式飞行器多体动力学建模与飞行力学特性[J]. 兵工学报, 2023, 44(8): 2245-2262.
DU Wanshan, ZHOU Zhou, BAI Yu, ZHANG Zhilin, WANG Keilei. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft[J]. Acta Armamentarii, 2023, 44(8): 2245-2262.
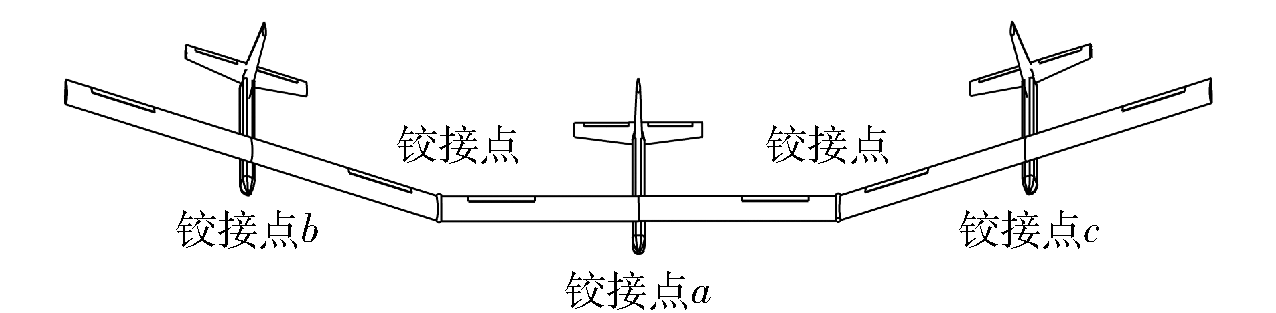
图1 组合式三体飞行器示意图
Fig.1 Diagram of combined three-body aircraft
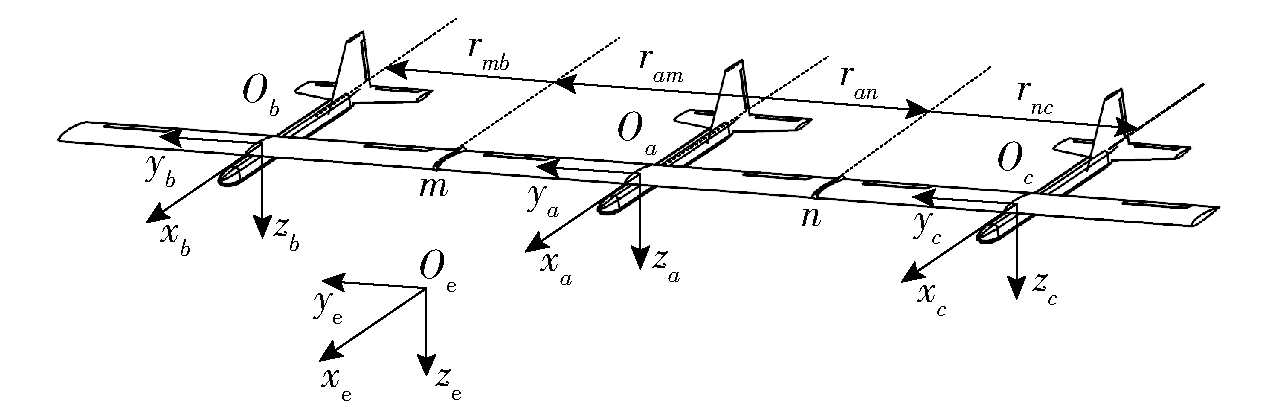
图2 组合式三体飞行器坐标轴系示意图
Fig.2 Diagram of coordinate system of combined three-body aircraft
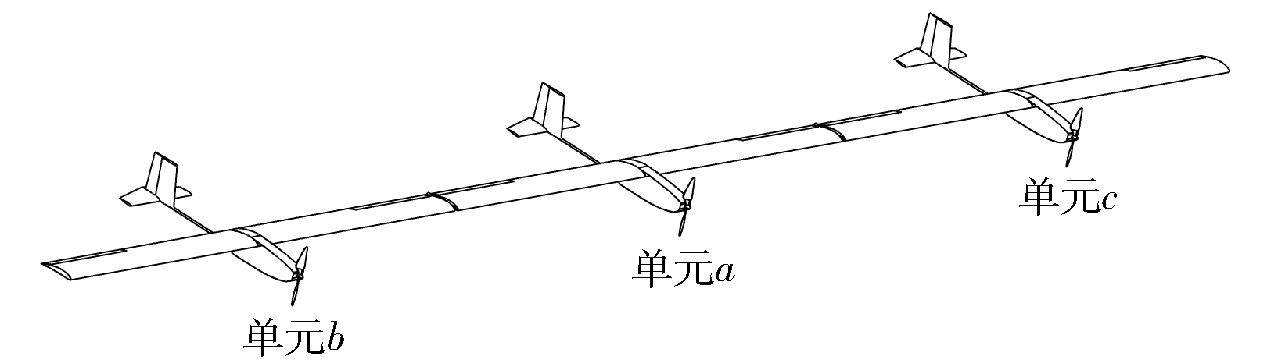
图3 组合式三体飞行器模型
Fig.3 Example model of combined three-body aircraft
| 参数 | 数值 |
|---|---|
| 质量/kg | 3.75 |
| 参考展长/m | 3.2 |
| 平均气动弦长/m | 0.3 |
| 展弦比 | 10.6 |
| 参考面积/m2 | 0.87 |
| 对轴Ox的惯量Ixx/(kg·m2) | 0.734 |
| 对轴Oy的惯量Iyy/(kg·m2) | 0.41 |
| 对轴Oz的惯量Izz/(kg·m2) | 1.1 |
| 对轴Oz和Ox的惯性积Izx/(kg·m2) | -0.01 |
表1 飞行单元基本参数
Table 1 Basic parameters of single aircraft
| 参数 | 数值 |
|---|---|
| 质量/kg | 3.75 |
| 参考展长/m | 3.2 |
| 平均气动弦长/m | 0.3 |
| 展弦比 | 10.6 |
| 参考面积/m2 | 0.87 |
| 对轴Ox的惯量Ixx/(kg·m2) | 0.734 |
| 对轴Oy的惯量Iyy/(kg·m2) | 0.41 |
| 对轴Oz的惯量Izz/(kg·m2) | 1.1 |
| 对轴Oz和Ox的惯性积Izx/(kg·m2) | -0.01 |
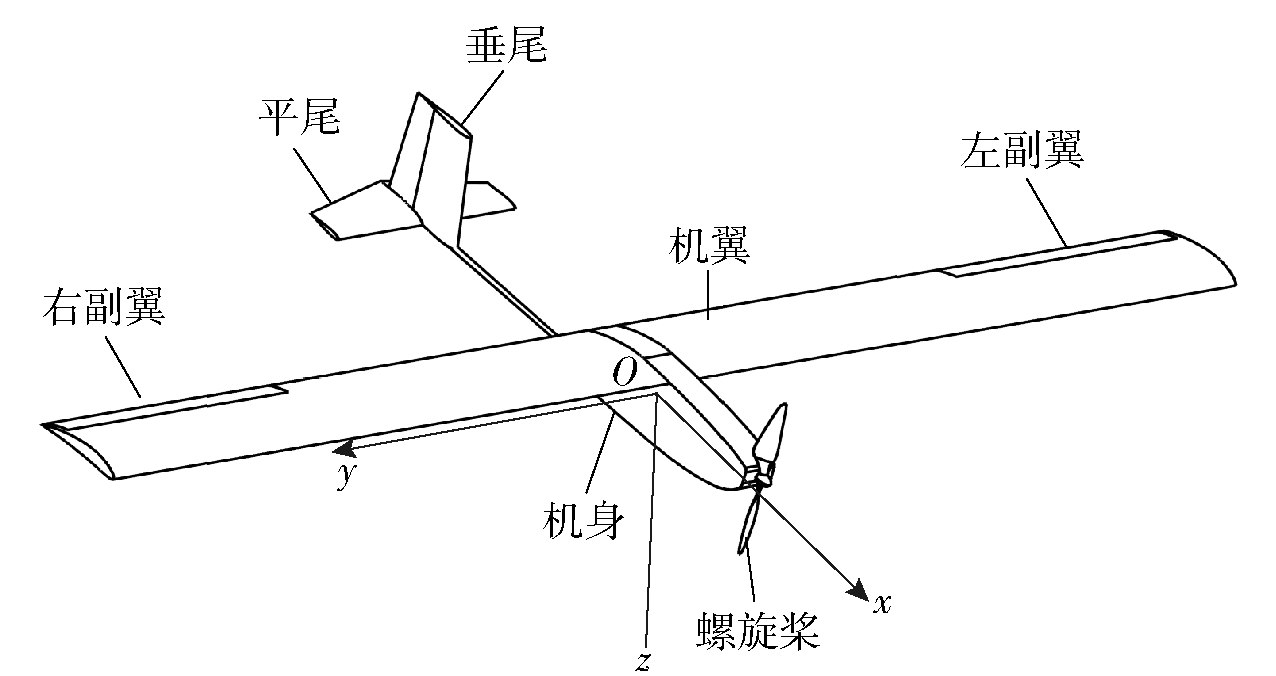
图4 单体飞行器模型
Fig.4 Model of single aircraft
| CFD仿真内容 | 气动参数 | 计算方法 |
|---|---|---|
| 基本气动参数项 | CD0、CL0等 | 雷诺平均Navier-Stokes (RANS)方法 |
| 气动耦合项 | C 、C 等 | |
| 静导数项 | CDα、CLα等 | |
| 操纵导数项 | C 、C 等 | |
| 动导数项 | CLq、CYp等 | 涡格法 |
表2 气动力数据库建立方法
Table 2 Method of establishing aerodynamic database
| CFD仿真内容 | 气动参数 | 计算方法 |
|---|---|---|
| 基本气动参数项 | CD0、CL0等 | 雷诺平均Navier-Stokes (RANS)方法 |
| 气动耦合项 | C 、C 等 | |
| 静导数项 | CDα、CLα等 | |
| 操纵导数项 | C 、C 等 | |
| 动导数项 | CLq、CYp等 | 涡格法 |
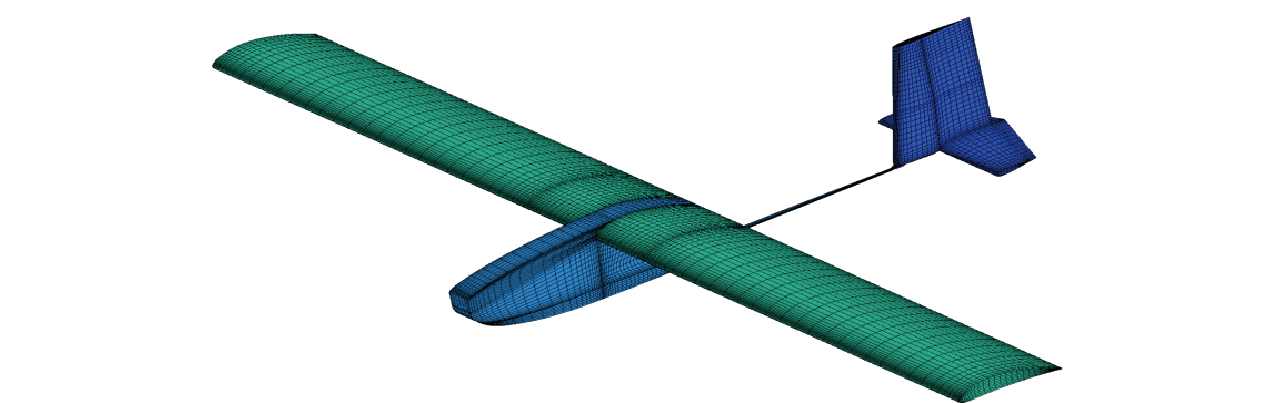
图5 单体飞行器网格分布
Fig.5 Diagram of grid distribution of single aircraft

图6 组合式三体飞行器网格分布
Fig.6 Diagram of grid distribution of combined three-body aircraft
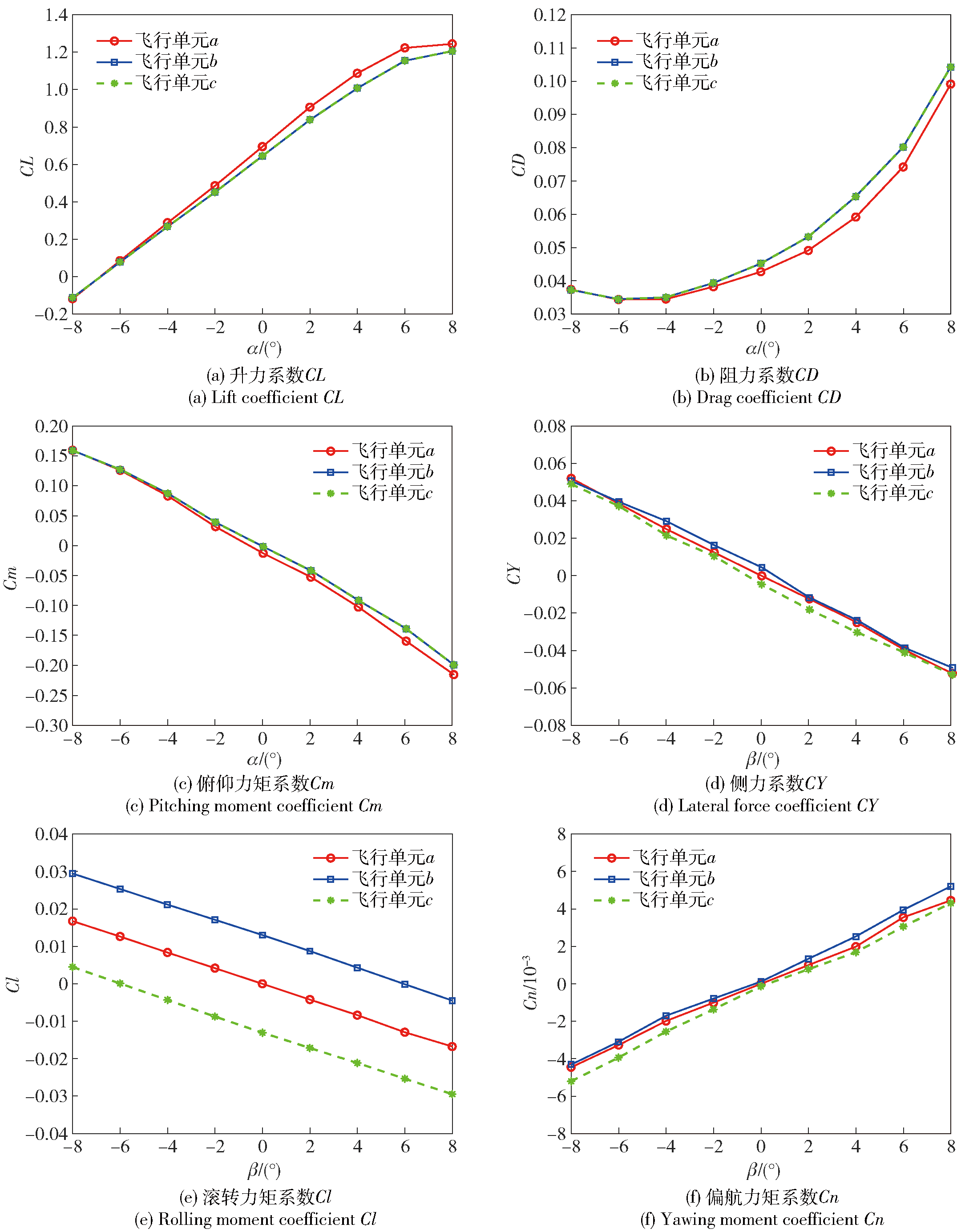
图7 飞行单元气动参数随迎角α和侧滑角β变化
Fig.7 Curve of aerodynamic parameters of single aircraft varying with attack angle α and sideslip angle β
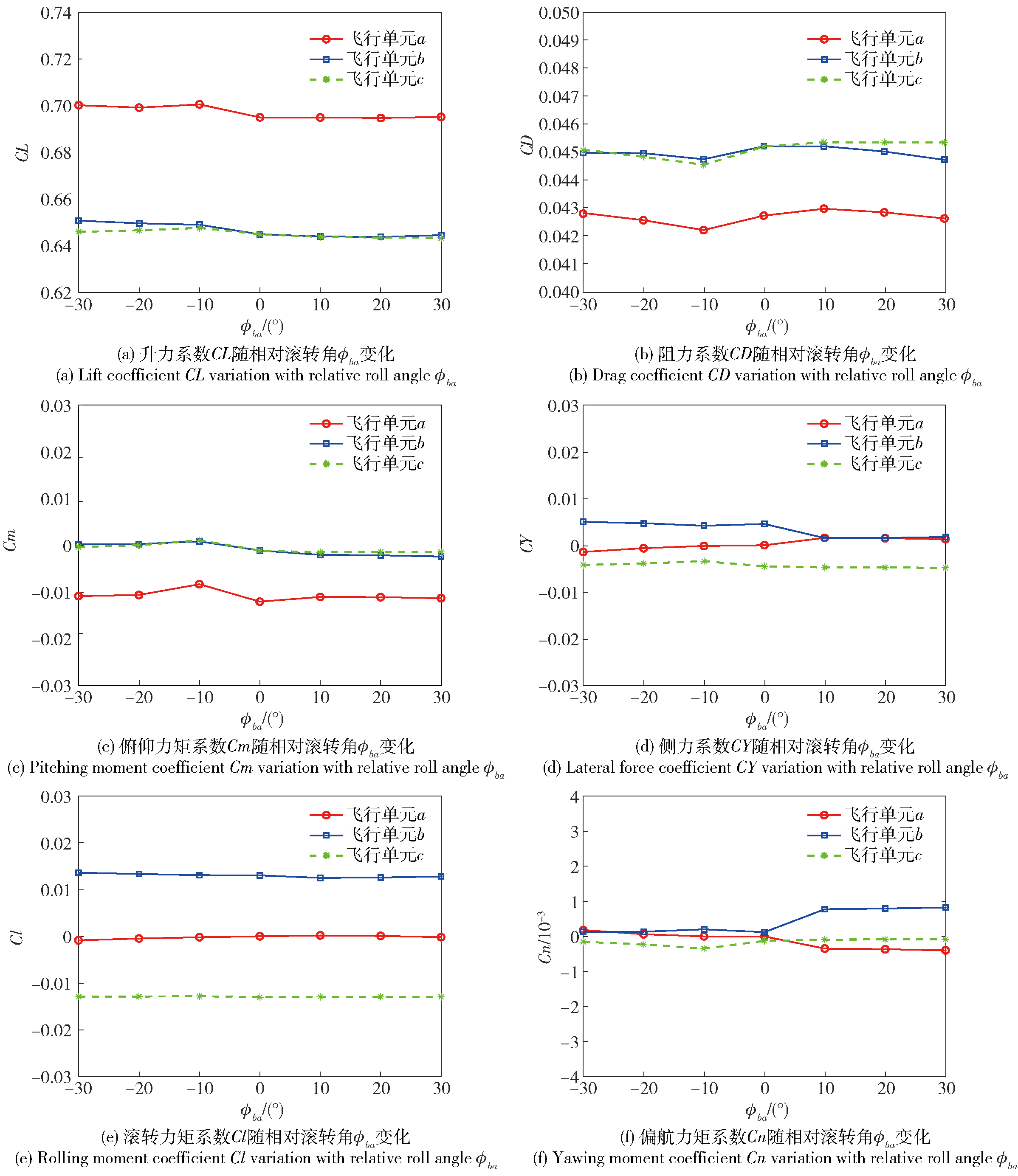
图8 飞行单元气动参数随相对滚转角ϕba变化
Fig.8 Curve of aerodynamic parameters of single aircraft varying with relative roll angle ϕba
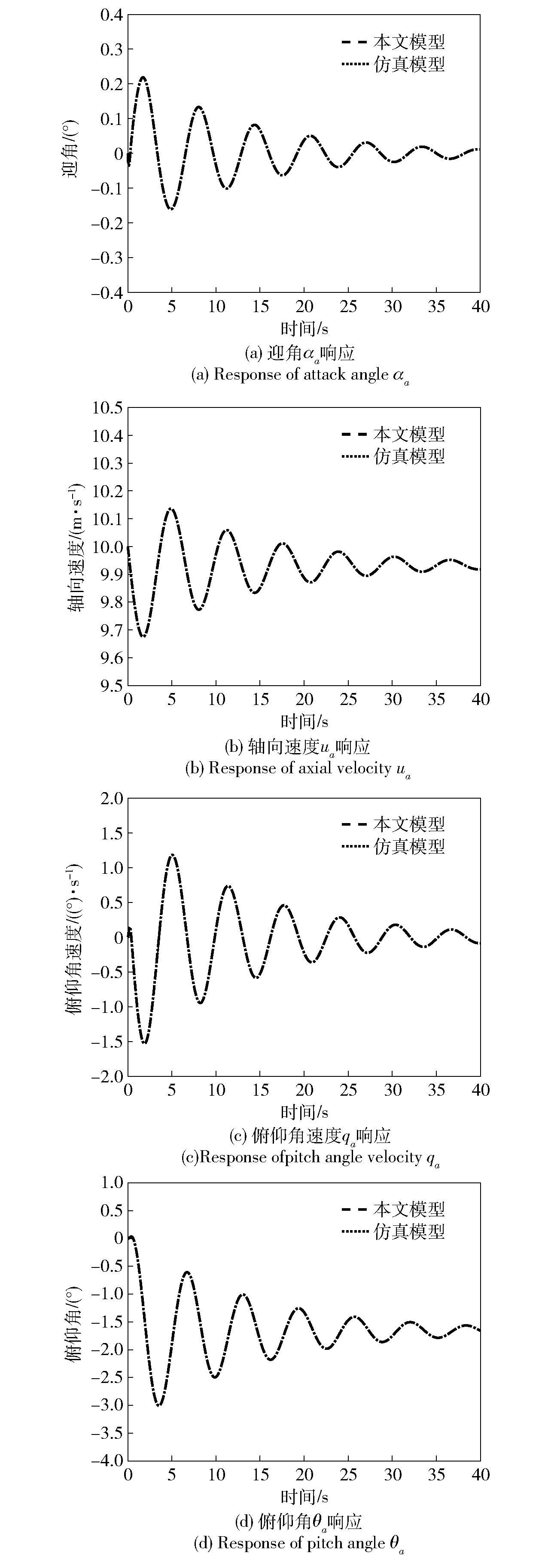
图9 飞行单元a状态量响应
Fig.9 Diagram of state response of single aircraft a
| 初始状态 | ϕba/(°) | ϕca/(°) |
|---|---|---|
| 1 | 10 | -10 |
| 2 | -10 | 10 |
表3 不同初始状态的相对滚转角
Table 3 Relative roll angles at different initial states
| 初始状态 | ϕba/(°) | ϕca/(°) |
|---|---|---|
| 1 | 10 | -10 |
| 2 | -10 | 10 |
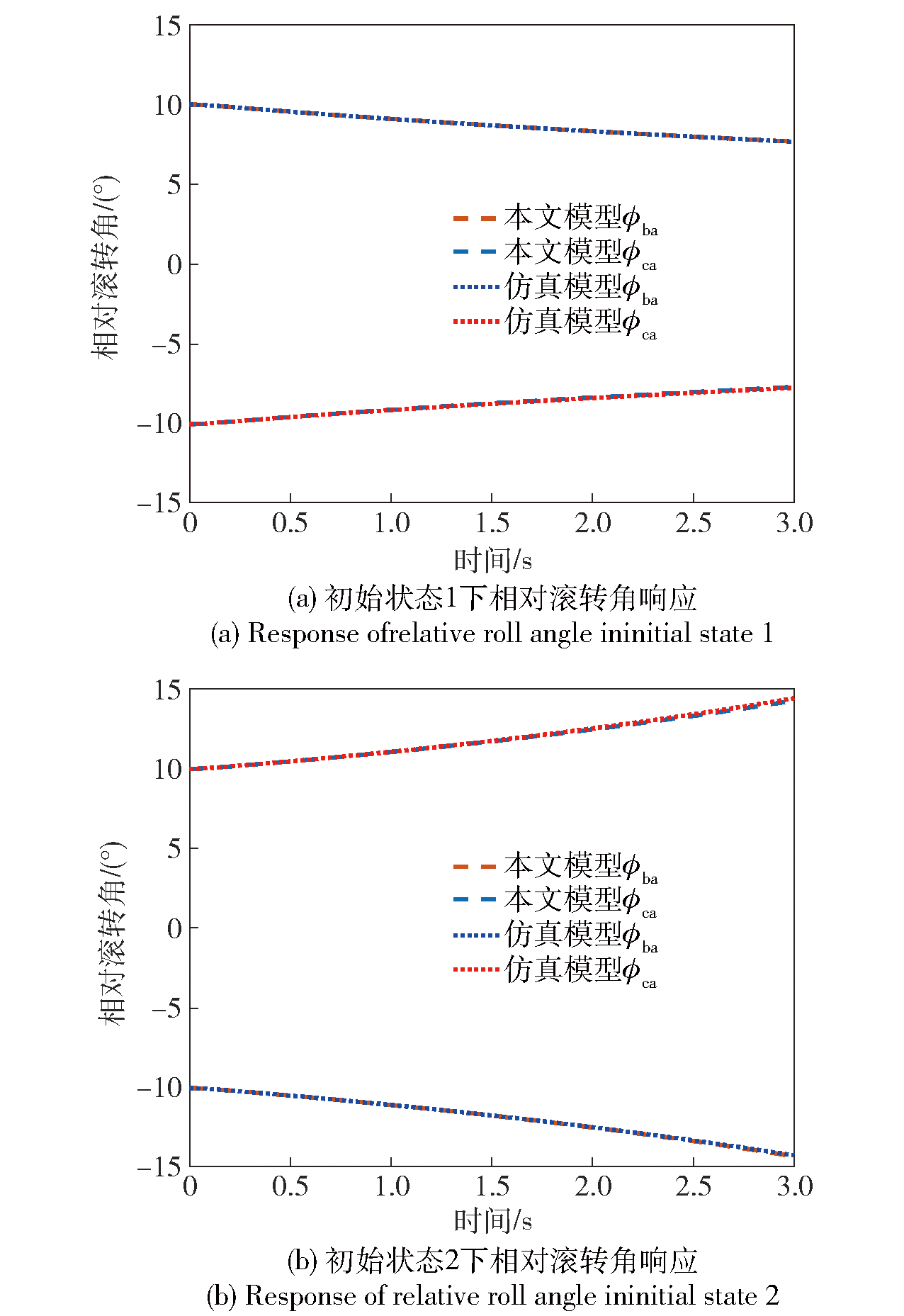
图10 不同初始状态的相对滚转角响应
Fig.10 Diagram of relative roll angle response in different initial states
| 未知配平量 | 配平状态1 | 配平状态2 |
|---|---|---|
| 升降舵偏角/(°) | -0.2622 | -0.1347 |
| 油门杆操纵量/% | 35.5 | 35.5 |
| 方向舵偏角/(°) | 0 | 0 |
| 飞行单元a副翼偏角/(°) | 0 | 0 |
| 飞行单元b副翼偏角/(°) | 1.6809 | 2.0557 |
| 飞行单元c副翼偏角/(°) | -1.6809 | 2.0557 |
| 相对滚转角ϕba/(°) | 6.4393 | -6.6386 |
| 相对滚转角ϕca/(°) | -6.4393 | 6.6386 |
表4 配平分析结果
Table 4 Result of trim analysis
| 未知配平量 | 配平状态1 | 配平状态2 |
|---|---|---|
| 升降舵偏角/(°) | -0.2622 | -0.1347 |
| 油门杆操纵量/% | 35.5 | 35.5 |
| 方向舵偏角/(°) | 0 | 0 |
| 飞行单元a副翼偏角/(°) | 0 | 0 |
| 飞行单元b副翼偏角/(°) | 1.6809 | 2.0557 |
| 飞行单元c副翼偏角/(°) | -1.6809 | 2.0557 |
| 相对滚转角ϕba/(°) | 6.4393 | -6.6386 |
| 相对滚转角ϕca/(°) | -6.4393 | 6.6386 |
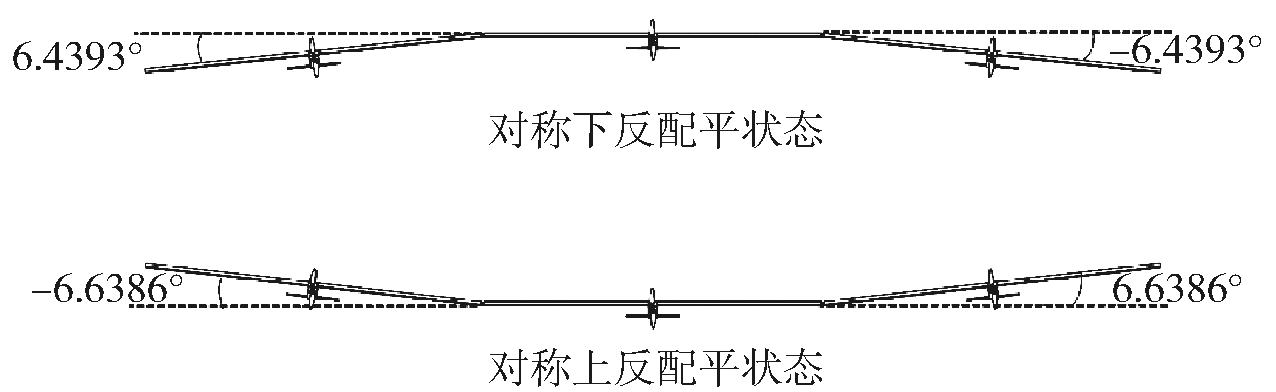
图11 两种配平状态
Fig.11 Diagram of two trim states
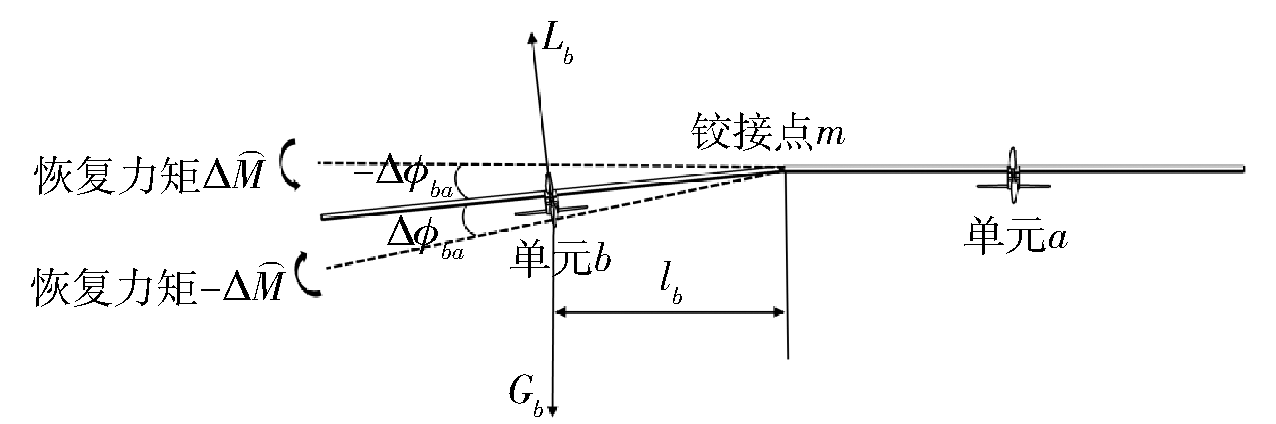
图12 “对称下反”状态相对滚转运动静稳定性分析
Fig.12 Static stability analysis of relative rolling motion of “symmetrical lower inverse”
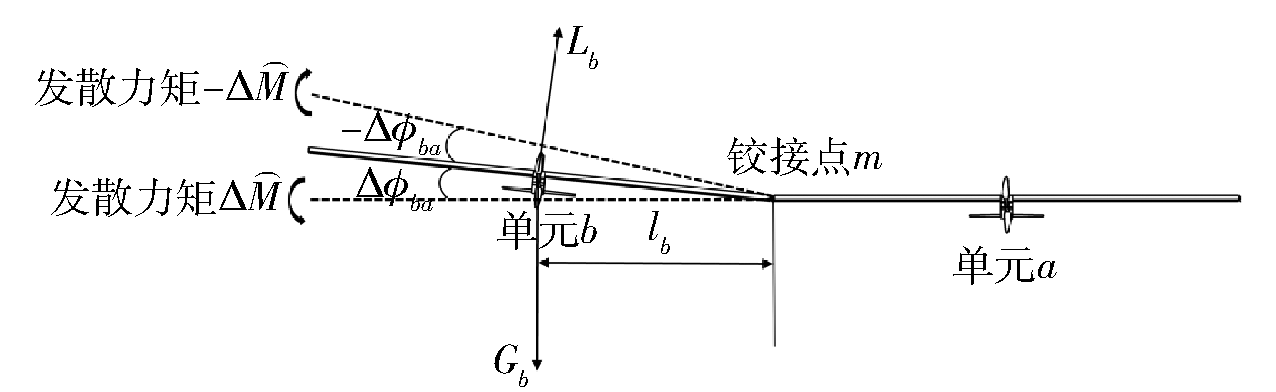
图13 “对称上反”状态相对滚转运动稳定性分析
Fig.13 Static stability analysis of relative rolling motion of “symmetrical upper inverse”
| 运动模态 | “对称下反”配平点1 | “对称上反”配平点2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 特征根 | 模态特征 | 阻尼比 | 时间常数/s | 特征根 | 模态特征 | 阻尼比 | 时间常数/s | |
| 短周期模态 | -7.1334±5.9653j | 收敛 | 0.7671 | 1.0533 | -7.1254±5.8959j | 收敛 | 0.7704 | 1.0657 |
| 长周期模态 | -0.0363±0.9628j | 收敛 | 0.0377 | 6.5260 | -0.0372±0.9639j | 收敛 | 0.0386 | 6.5185 |
| 滚转模态 | -56.2923 | 收敛 | 1 | 0.0123 | -57.9442 | 收敛 | 1 | 0.0120 |
| 螺旋模态 | 0.1874 | 发散 | 1 | 3.6988 | -0.1297 | 收敛 | 1 | 5.3442 |
| 荷兰滚模态 | -0.6013±0.5190j | 收敛 | 0.7570 | 12.1063 | -0.3580±0.7475j | 收敛 | 0.4319 | 8.4056 |
| 复合对称运动模态1 | -17.288 | 收敛 | 1 | 0.0401 | -17.8852 | 收敛 | 1 | 0.0388 |
| 复合对称运动模态2 | -0.1579 | 收敛 | 1 | 4.3898 | 0.1200 | 发散 | 1 | 5.7762 |
| 复合反对称运动模态1 | -9.4704 | 收敛 | 1 | 0.0732 | -9.6093 | 收敛 | 1 | 0.0721 |
| 复合反对称运动模态2 | -0.3058 | 收敛 | 1 | 2.2667 | 0.2888 | 发散 | 1 | 2.4001 |
表5 配平状态运动模态分析
Table 5 Motion mode analysis of trim states
| 运动模态 | “对称下反”配平点1 | “对称上反”配平点2 | ||||||
|---|---|---|---|---|---|---|---|---|
| 特征根 | 模态特征 | 阻尼比 | 时间常数/s | 特征根 | 模态特征 | 阻尼比 | 时间常数/s | |
| 短周期模态 | -7.1334±5.9653j | 收敛 | 0.7671 | 1.0533 | -7.1254±5.8959j | 收敛 | 0.7704 | 1.0657 |
| 长周期模态 | -0.0363±0.9628j | 收敛 | 0.0377 | 6.5260 | -0.0372±0.9639j | 收敛 | 0.0386 | 6.5185 |
| 滚转模态 | -56.2923 | 收敛 | 1 | 0.0123 | -57.9442 | 收敛 | 1 | 0.0120 |
| 螺旋模态 | 0.1874 | 发散 | 1 | 3.6988 | -0.1297 | 收敛 | 1 | 5.3442 |
| 荷兰滚模态 | -0.6013±0.5190j | 收敛 | 0.7570 | 12.1063 | -0.3580±0.7475j | 收敛 | 0.4319 | 8.4056 |
| 复合对称运动模态1 | -17.288 | 收敛 | 1 | 0.0401 | -17.8852 | 收敛 | 1 | 0.0388 |
| 复合对称运动模态2 | -0.1579 | 收敛 | 1 | 4.3898 | 0.1200 | 发散 | 1 | 5.7762 |
| 复合反对称运动模态1 | -9.4704 | 收敛 | 1 | 0.0732 | -9.6093 | 收敛 | 1 | 0.0721 |
| 复合反对称运动模态2 | -0.3058 | 收敛 | 1 | 2.2667 | 0.2888 | 发散 | 1 | 2.4001 |
| 配平状态 | 运动模态 | Δpa | Δϕa | Δqa | Δθa | Δra | Δψa | Δωba | Δϕba | Δωca | Δϕca |
|---|---|---|---|---|---|---|---|---|---|---|---|
| “对称下反” 配平点1 | 复合对称运动 模态1 | -1.90× 10-15 | 1.10× 10-16 | -0.0244 | 0.0014 | 2.37× 10-18 | -1.37× 10-19 | 0.5766 | -0.0334 | -0.5766 | 0.0334 |
| 复合对称运动 模态2 | 1.01× 10-15 | -1.07× 10-14 | -0.0007 | 0.0043 | -3.79× 10-15 | 2.39× 10-14 | 0.0942 | -0.5962 | -0.0942 | 0.5962 | |
| 复合反对称 运动模态1 | -0.7885 | 0.0833 | -1.21× 10-15 | 9.12× 10-17 | -0.0488 | 0.0052 | 0.4221 | -0.0446 | 0.4221 | -0.0446 | |
| 复合反对称 运动模态2 | -0.1118 | 0.3658 | -8.87× 10-16 | 1.32× 10-15 | -0.0208 | 0.0681 | 0.1840 | -0.6018 | 0.1840 | -0.6018 | |
| “对称上反” 配平点2 | 复合对称 运动模态1 | -1.89× 10-16 | 1.39× 10-18 | -0.0261 | 0.0015 | 1.10× 10-16 | -6.16× 10-18 | -0.5566 | 0.0311 | 0.5566 | -0.0311 |
| 复合对称 运动模态2 | -5.98× 10-14 | -5.05× 10-13 | -0.0026 | -0.0216 | -1.27× 10-14 | -1.06× 10-13 | 0.0755 | 0.6291 | -0.0755 | -0.6291 | |
| 复合反对称 运动模态1 | -0.7924 | 0.0825 | 1.07× 10-14 | -1.07× 10-15 | -0.0486 | 0.0051 | 0.3863 | -0.0402 | 0.3863 | -0.0402 | |
| 复合反对称 运动模态2 | 0.1039 | 0.3596 | -5.83× 10-14 | -2.06× 10-13 | -0.0345 | -0.1195 | -0.1795 | -0.6214 | -0.1795 | -0.6214 |
表6 新生运动模态特征向量分析
Table 6 Feature vector analysis of new motion modes
| 配平状态 | 运动模态 | Δpa | Δϕa | Δqa | Δθa | Δra | Δψa | Δωba | Δϕba | Δωca | Δϕca |
|---|---|---|---|---|---|---|---|---|---|---|---|
| “对称下反” 配平点1 | 复合对称运动 模态1 | -1.90× 10-15 | 1.10× 10-16 | -0.0244 | 0.0014 | 2.37× 10-18 | -1.37× 10-19 | 0.5766 | -0.0334 | -0.5766 | 0.0334 |
| 复合对称运动 模态2 | 1.01× 10-15 | -1.07× 10-14 | -0.0007 | 0.0043 | -3.79× 10-15 | 2.39× 10-14 | 0.0942 | -0.5962 | -0.0942 | 0.5962 | |
| 复合反对称 运动模态1 | -0.7885 | 0.0833 | -1.21× 10-15 | 9.12× 10-17 | -0.0488 | 0.0052 | 0.4221 | -0.0446 | 0.4221 | -0.0446 | |
| 复合反对称 运动模态2 | -0.1118 | 0.3658 | -8.87× 10-16 | 1.32× 10-15 | -0.0208 | 0.0681 | 0.1840 | -0.6018 | 0.1840 | -0.6018 | |
| “对称上反” 配平点2 | 复合对称 运动模态1 | -1.89× 10-16 | 1.39× 10-18 | -0.0261 | 0.0015 | 1.10× 10-16 | -6.16× 10-18 | -0.5566 | 0.0311 | 0.5566 | -0.0311 |
| 复合对称 运动模态2 | -5.98× 10-14 | -5.05× 10-13 | -0.0026 | -0.0216 | -1.27× 10-14 | -1.06× 10-13 | 0.0755 | 0.6291 | -0.0755 | -0.6291 | |
| 复合反对称 运动模态1 | -0.7924 | 0.0825 | 1.07× 10-14 | -1.07× 10-15 | -0.0486 | 0.0051 | 0.3863 | -0.0402 | 0.3863 | -0.0402 | |
| 复合反对称 运动模态2 | 0.1039 | 0.3596 | -5.83× 10-14 | -2.06× 10-13 | -0.0345 | -0.1195 | -0.1795 | -0.6214 | -0.1795 | -0.6214 |
| 运动模态 | 特征根 | 模态特征 |
|---|---|---|
| 短周期模态 | -1.0419±2.1693j | 收敛 |
| 长周期模态 | 0.0643±0.0489j | 发散 |
| 滚转模态 | -4.4588 | 收敛 |
| 荷兰滚模态 | -0.2048±0.8746j | 收敛 |
| 复合运动模态1 | -0.9696 | 收敛 |
| 复合运动模态2 | 0.9625 | 发散 |
表7 双机组合运动模态
Table 7 Motion modes of combined two-body aircraft
| 运动模态 | 特征根 | 模态特征 |
|---|---|---|
| 短周期模态 | -1.0419±2.1693j | 收敛 |
| 长周期模态 | 0.0643±0.0489j | 发散 |
| 滚转模态 | -4.4588 | 收敛 |
| 荷兰滚模态 | -0.2048±0.8746j | 收敛 |
| 复合运动模态1 | -0.9696 | 收敛 |
| 复合运动模态2 | 0.9625 | 发散 |
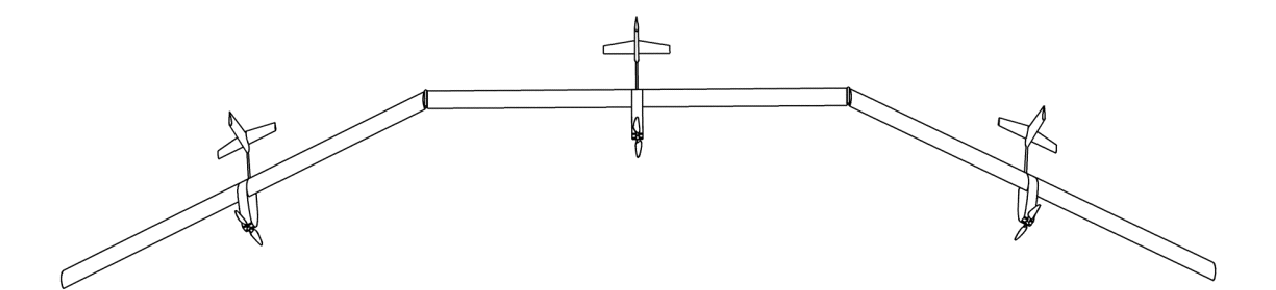
图14 复合对称运动
Fig.14 Composite symmetric motion

图15 复合反对称运动
Fig.15 Composite antisymmetric motion
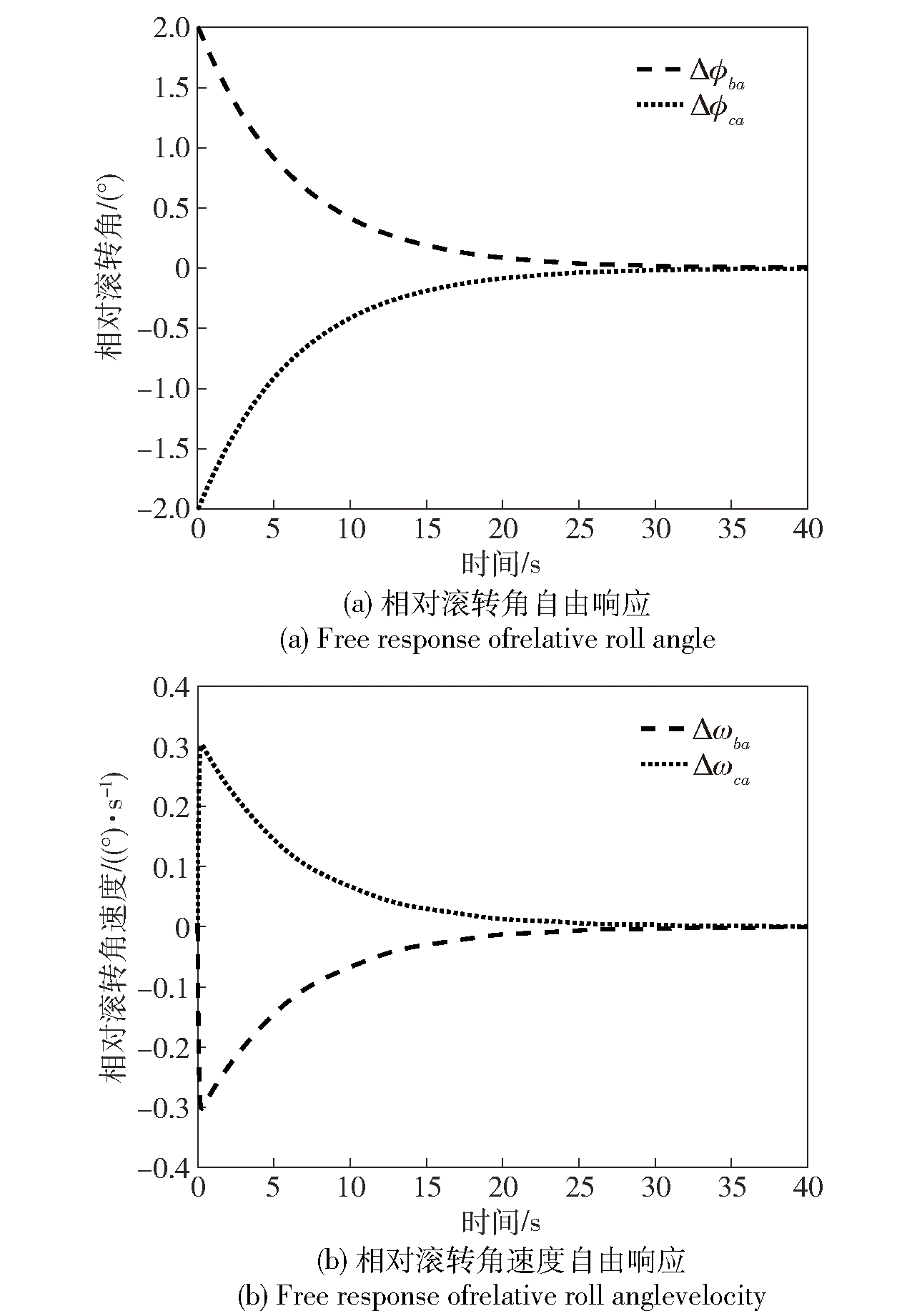
图16 “对称下反”配平点1处系统自由响应
Fig.16 System free response of “symmetrical lower inverse”
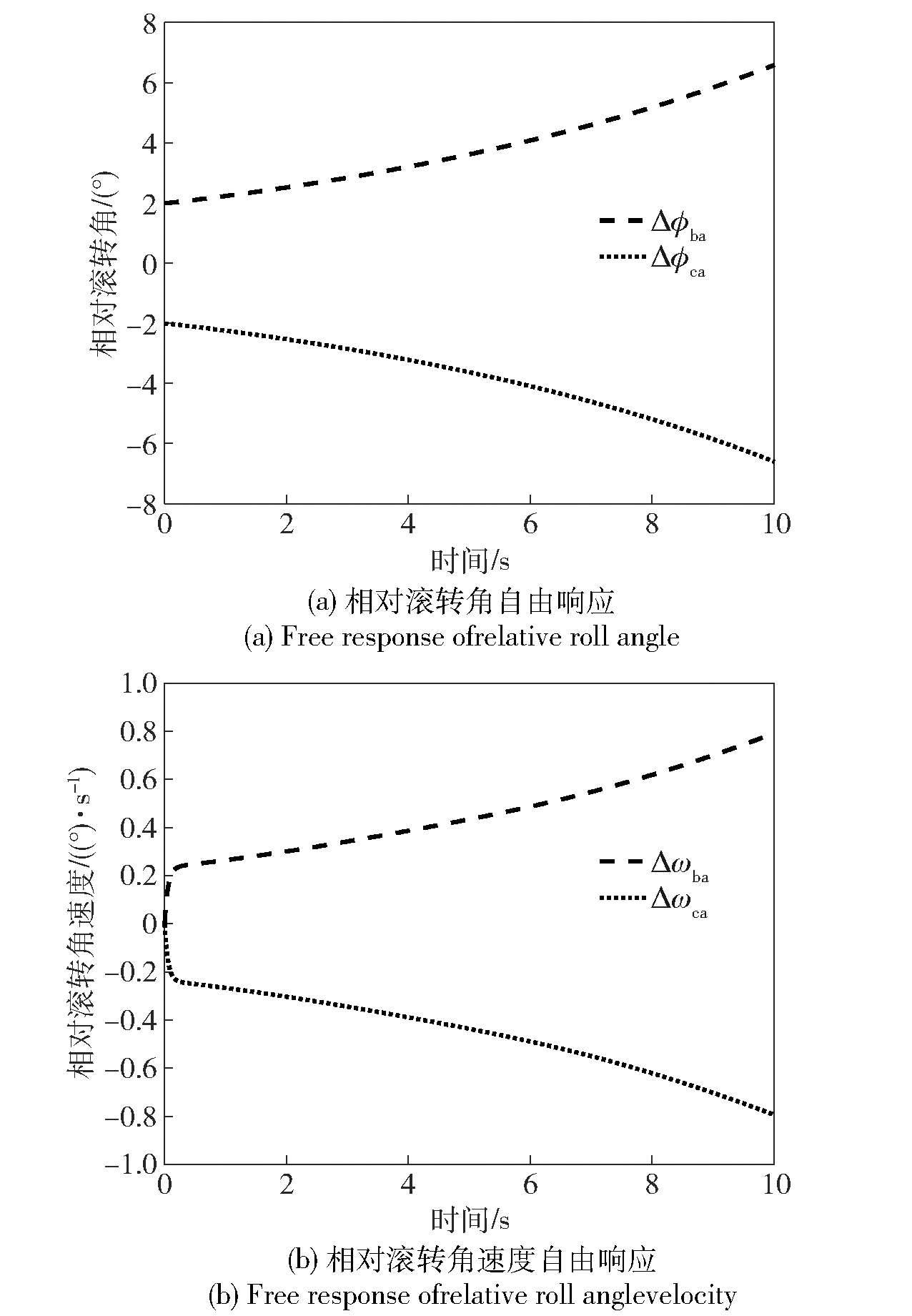
图17 “对称上反”配平点2处系统自由响应
Fig.17 System free response of “symmetrical upper inverse” at trim point 2
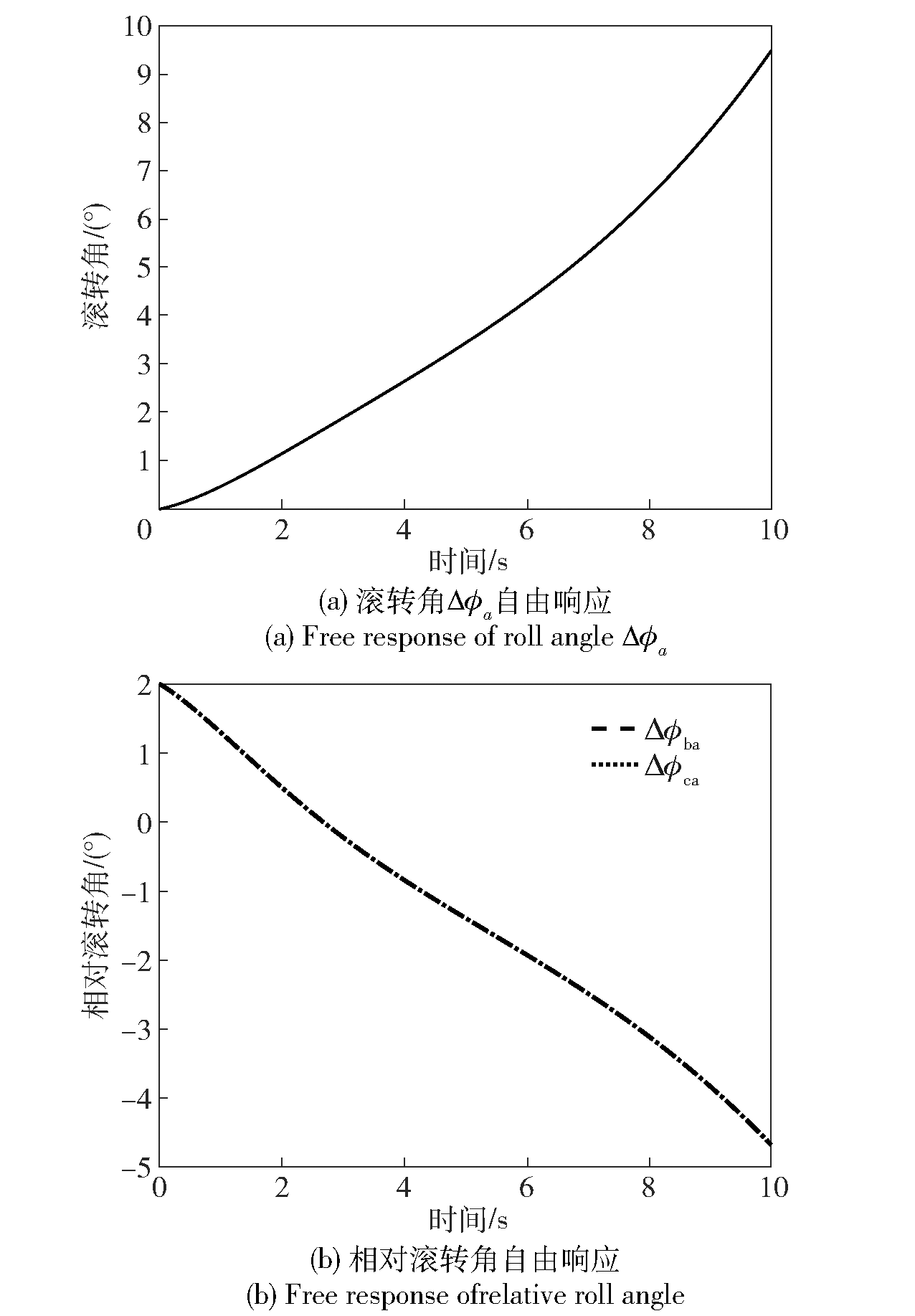
图18 配平点1处不对称扰动下系统自由响应
Fig.18 System free response under asymmetric disturbance at trim point 1
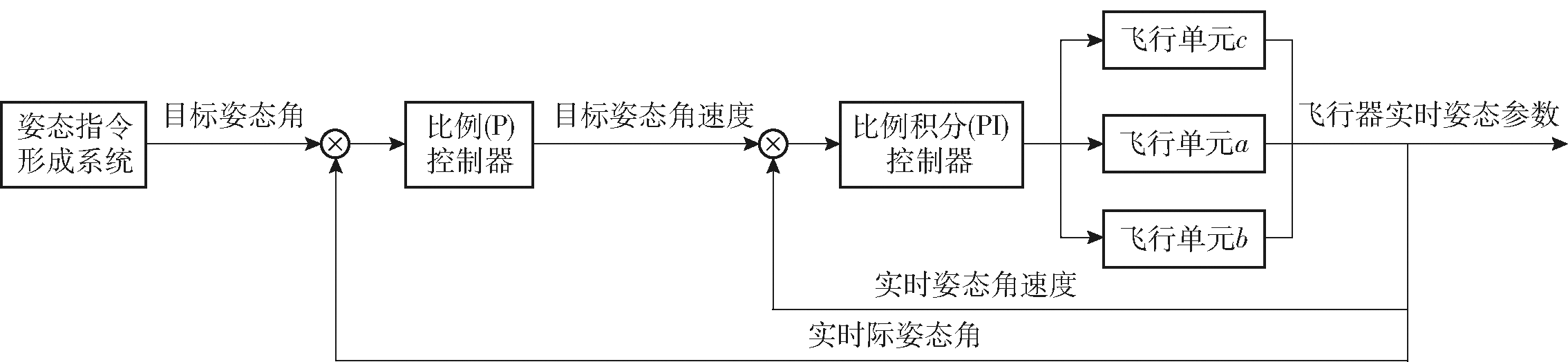
图19 增稳控制系统设计思路图
Fig.19 Diagram of design of stability augmentation control system
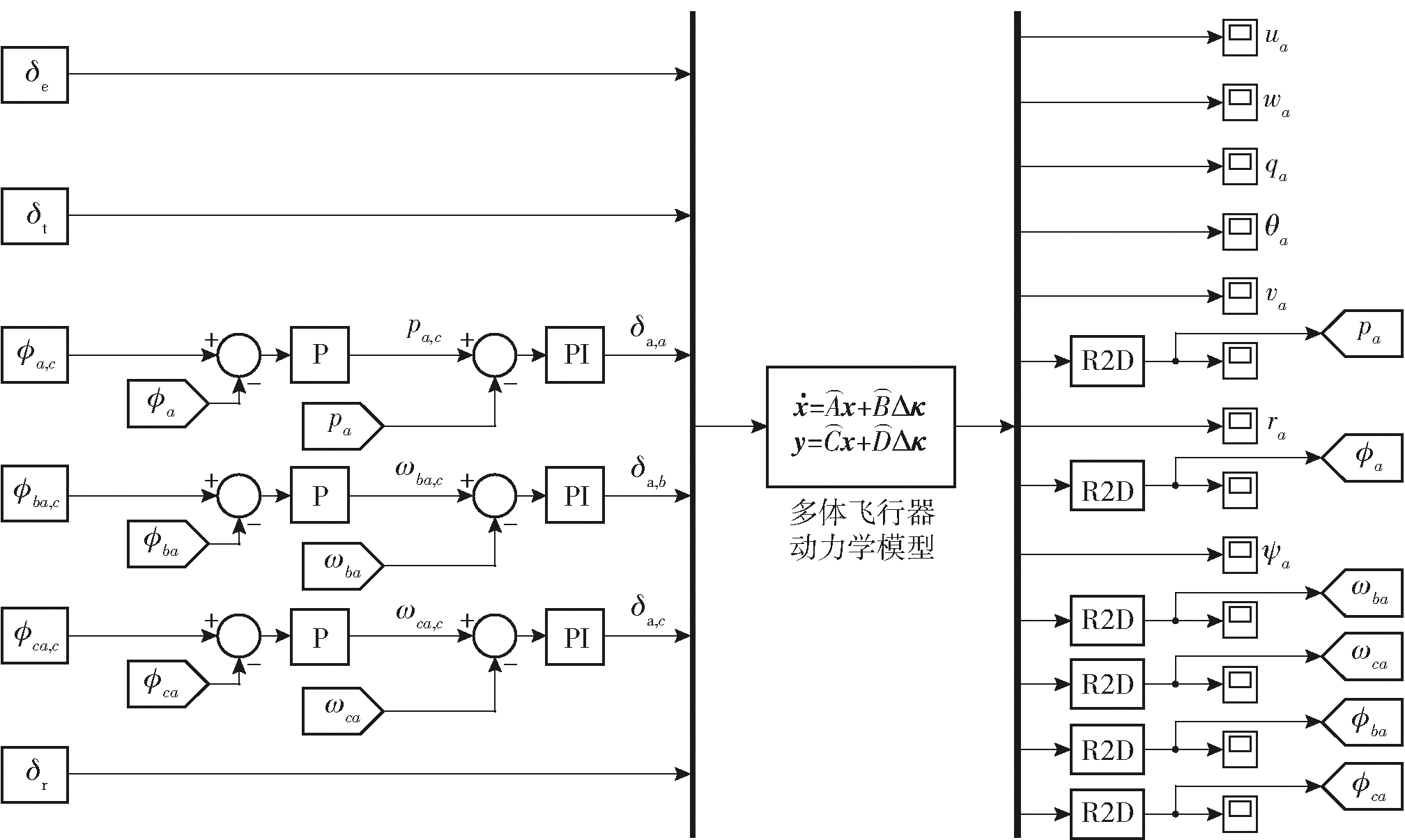
图20 Simulink仿真框图
Fig.20 Diagram of Simulink simulation
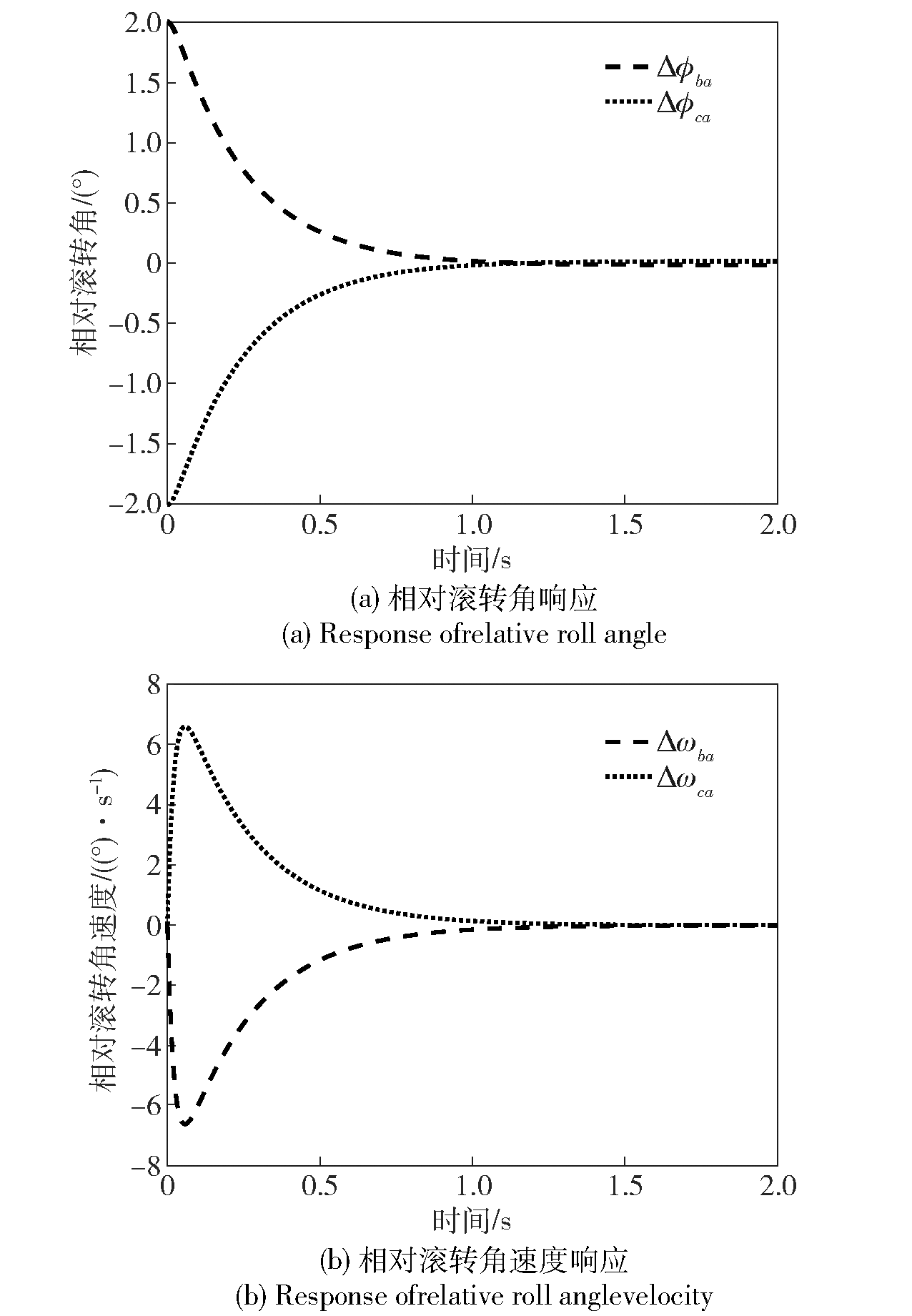
图21 增稳控制后配平点2处对称扰动响应
Fig.21 Response under symmetric disturbance at trim point 2 after stability augmentation control
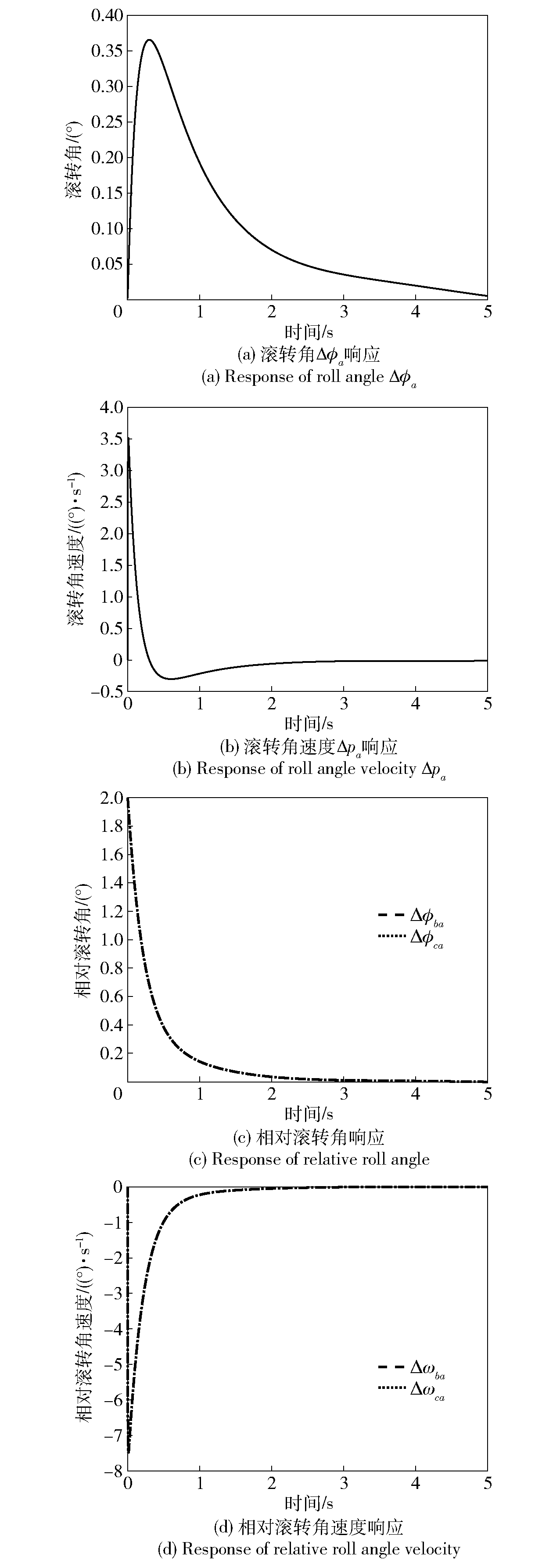
图22 增稳控制后配平点1处不对称扰动响应
Fig.22 Response under asymmetric disturbance at trim point 1 after stability augmentation control
| [1] |
周伟, 马培洋, 郭正, 等. 基于翼尖链翼的组合固定翼无人机研究进展[J]. 航空学报, 2022, 43(9): 325946.
|
|
|
|
| [2] |
杨延平, 张子健, 应培, 等. 集群组合式柔性无人机:创新,机遇及技术挑战[J]. 飞行力学, 2021, 39(2):1-9, 15.
|
|
|
|
| [3] |
武明建. 变体太阳能无人机设计与能量优化[D]. 南京: 南京航空航天大学, 2018.
|
|
|
|
| [4] |
doi: 10.1016/j.ast.2020.106404 URL |
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
安朝, 谢长川, 孟杨, 等. 多体组合式无人机飞行力学稳定性分析及增稳控制研究[J]. 工程力学, 2021, 38(11):248-256.
|
|
|
|
| [10] |
刘东旭, 谢长川, 洪冠新. 翼尖铰接复合飞行器动力学特性研究[J]. 北京航空航天大学学报, 2021, 47(11):2311-2321.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
doi: 10.2514/1.C032634 URL |
| [14] |
|
| [15] |
|
| [16] |
张青斌, 高峰, 郭锐, 等. 动力翼伞系统拟坐标形式的多体动力学建模[J]. 兵工学报, 2019, 40(9):1935-1942.
doi: 10.3969/j.issn.1000-1093.2019.09.019 |
|
doi: 10.3969/j.issn.1000-1093.2019.09.019 |
|
| [17] |
高峰, 郭锐, 丰志伟, 等. 翼伞系统5段归航轨迹优化研究[J]. 兵工学报, 2020, 41(5):1025-1033.
doi: 10.3969/j.issn.1000-1093.2020.05.022 |
|
doi: 10.3969/j.issn.1000-1093.2020.05.022 |
|
| [18] |
蒋国江. 扑翼变形飞行器的动力学建模与飞行仿真[D]. 长沙: 国防科学技术大学, 2015.
|
|
|
|
| [19] |
郭锐. 翼伞系统多体动力学与试验[D]. 长沙: 国防科学技术大学, 2017.
|
|
|
|
| [20] |
|
| [21] |
doi: 10.1016/j.cja.2013.06.004 URL |
| [22] |
doi: 10.1016/j.cja.2016.10.010 URL |
| [23] |
刘沛清. 空气螺旋桨理论及其应用[M]. 北京: 北京航空航天大学出版社, 2006.
|
|
|
|
| [24] |
班度·N. 帕玛迪. 飞机的性能、稳定性、动力学与控制[M]. 商重阳, 左英桃, 夏露, 等, 译. 第2版. 北京: 航空工业出版社, 2013.
|
|
|
|
| [25] |
方振平, 陈万春, 张曙光. 航空飞行器飞行动力学[M]. 北京: 北京航空航天大学出版社, 2012.
|
|
|
|
| [26] |
阙志宏. 线性系统理论[M]. 西安: 西北工业大学出版社, 1995.
|
|
|
| [1] | 肖万港, 周云波, 傅耀宇, 张明, 周军, 葛纪桃. 土壤对军用越野车辆机动性能影响分析[J]. 兵工学报, 2024, 45(1): 288-298. |
| [2] | 张子豪, 王汉平. 考虑弹-筒柔性的潜载导弹弹射多体动力学分析方法[J]. 兵工学报, 2022, 43(2): 305-315. |
| [3] | 张青斌, 高峰, 郭锐, 丰志伟, 葛健全. 动力翼伞系统拟坐标形式的多体动力学建模[J]. 兵工学报, 2019, 40(9): 1935-1942. |
| [4] | 陈方正, 于剑桥, 沈元川, 马安鹏. 筒射串翼无人机展开动力学分析[J]. 兵工学报, 2019, 40(1): 89-98. |
| [5] | 赖雄鸣, 段吉安, 朱伟. 多因素影响下的连杆机构可靠性分析[J]. 兵工学报, 2012, 33(4): 497-502. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4