| [1] |
李昌玺, 孙玉彪, 范泽昊, 等. 无人作战平台发展现状及趋势[J]. 中国电子科学研究院学报, 2023, 18(3):274-279.
|
|
LI C X, SUN Y B, FAN Z H, et al. Current development and tendency of unmanned combat platform[J]. Journal of CAEIT, 2023, 18(3):274-279. (in Chinese)
|
| [2] |
吕琛, 马剑, 王自力. PHM技术国内外发展情况综述[J]. 计算机测量与控制, 2016, 24(9):1-4.
|
|
LÜ C, MA J, WANG Z L. A state of the art review on PHM technology[J]. Computer Measurement & Control, 2016, 24(9):1-4. (in Chinese)
|
| [3] |
潘泉, 郭亚宁, 吕洋, 等. 无人机系统自主安全:定义、建模与分级[J]. 中国科学:信息科学, 2023, 53(8):1608-1628.
|
|
PAN Q, GUO Y, LÜ Y, et al. Autonomous safety and security of UAV systems:definition,modeling,and gradation[J]. Scientia Sinica(Informationis), 2023, 53(8):1608-1628. (in Chinese)
|
| [4] |
周小彬. 无人机自主安全控制方法研究与验证[D]. 长沙: 湖南大学, 2021.
|
|
ZHOU X B. Autonomous safety control strategy research and verification of unmanned aerial vehicle[D]. Changsha: Hunan University, 2021. (in Chinese)
|
| [5] |
杨帅, 张金换, 钱占伟, 等. 汽车安全多领域融合的研究与展望[J]. 汽车安全与节能学报, 2022, 13(1):29-47.
|
|
YANG S, ZHANG J H, QIAN Z W, et al. Research and prospect of multi domain integration of automobile safety[J]. Journal of Automotive Safety and Energy, 2022, 13(1):29-47. (in Chinese)
|
| [6] |
WANG H, SHAO W B, SUN C, et al. A survey on an emerging safety challenge for autonomous vehicles:safety of the intended functionality[J]. Engineering, 2024, 33:17-34.
|
| [7] |
邵文博, 李骏, 张玉新, 等. 智能汽车预期功能安全保障关键技术[J]. 汽车工程, 2022, 44(9):1289-1304.
|
|
SHAO W B, LI J, ZHANG Y X, et al. Key technologies to ensure the safety of the intended functionality for intelligent vehicles[J]. Automotive Engineering, 2022, 44(9):1289-1304. (in Chinese)
|
| [8] |
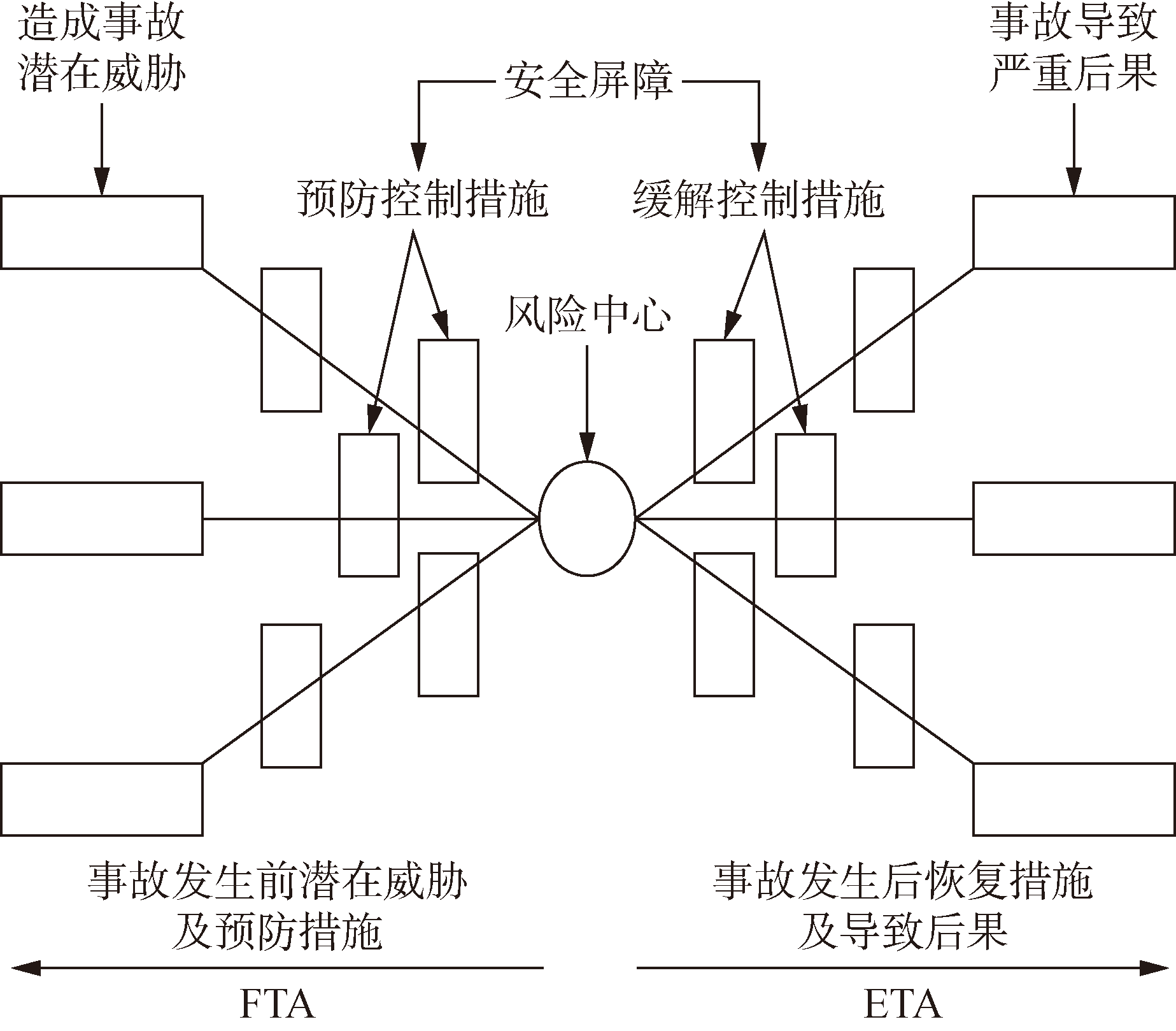
孟祥海, 马亿鑫, 孙佳豪. 城市主干道路段机动车与机动车之间事故的Bow-tie模型[J]. 交通运输系统工程与信息, 2020, 20(4):178-186.
|
|
MENG X H, MA Y X, SUN J H. Vehicle accidents Bow-tie model on urban arterial road[J]. Journal of Transportation Systems Engineering and Information Technology, 2020, 20(4):178-186. (in Chinese)
|
| [9] |
苏波, 郭江华, 蓝伟. 基于小型地面无人平台的自主安全树分析[J]. 兵工学报, 2014, 35(增刊1):12-16.
|
|
SU B, GUO J H, LAN W. Analysis of autonomous safety tree based on small unmanned ground platform[J]. Acta Armamentarii, 2014, 35(S1):12-16. (in Chinese)
|
| [10] |
BENSACI C, ZENNIR Y, POMORSKI D, et al. STPA and Bowtie risk analysis study for centralized and hierarchical control architectures comparison[J]. Alexandria Engineering Journal, 2020, 59(5):3799-3816.
|
| [11] |
LEVESON N. A new accident model for engineering safer systems[J]. Safety Science, 2004, 42(4):237-270.
|
| [12] |
BOOK G. Lessons learned from real world application of the Bow-tie method[C]// Proceedings of the SPE Middle East Health,Safety,Security,and Environment Conference and Exhibition.Abu Dhabi,UAE:SPE, 2012:SPE-154549-MS.
|
| [13] |
KHAKZAD N, KHAN F, AMYOTTE P. Dynamic risk analysis using bow-tie approach[J]. Reliability Engineering & System Safety, 2012, 104:36-44.
|
| [14] |
翟强, 程洪, 黄瑞, 等. 智能汽车中人工智能算法应用及其安全综述[J]. 电子科技大学学报, 2020, 49(4):490-498,510.
|
|
ZHAI Q, CHENG H, HUANG R, et al. A survey:artificial intelligence and its security in intelligent vehicle[J]. Journal of University of Electronic Science and Technology of China, 2020, 49(4):490-498,510. (in Chinese)
|
| [15] |
QI Y, DONG Y, KHASTGIR S, et al. STPA for learning-enabled systems:a survey and a new practice[C]// Proceedings of the 2023 IEEE 26th International Conference on Intelligent Transportation Systems(ITSC).Bilbao,Spain:IEEE, 2023:1381-1388.
|

 ), 纪超1,3, 杨德真2, 周桐1,3
), 纪超1,3, 杨德真2, 周桐1,3
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4