
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (3): 997-1009.doi: 10.12382/bgxb.2022.0693
吕佳朋, 史贤俊*( ), 肖支才
), 肖支才
收稿日期:2022-08-02
上线日期:2022-12-12
通讯作者:
基金资助:
LÜ Jiapeng, SHI Xianjun*(), XIAO Zhicai
Received:2022-08-02
Online:2022-12-12
摘要:
对装备中具体故障进行可诊断性评估,可以量化地表明故障被诊断的难易程度。针对故障可诊断性评价方法中存在的不客观及度量方法选择不恰当的问题,提出一种基于动态时间规整(Dynamic Time Warping,DTW)的时序距离度量方法。定义可诊断性评估模型,从实际系统中抽取系统的结构、信号、测试、故障模式4种要素,为故障可诊断性评估工作的开展打下基础。摒弃传统的从信号中提取特征进行相似性度量的做法,将信号看做时序序列,基于DTW方法衡量不同状态下各信号之间的相似程度,作为故障可诊断性的评估依据。使用动量轮系统对新方法进行仿真实验,仿真结果表明新方法在进行可诊断性评估方面具有客观性和有效性。
中图分类号:
吕佳朋, 史贤俊, 肖支才. 基于DTW时序距离的故障可诊断性评估方法[J]. 兵工学报, 2024, 45(3): 997-1009.
LÜ Jiapeng, SHI Xianjun, XIAO Zhicai. Diagnosability Evaluation Method Based on DTW Temporal Distance[J]. Acta Armamentarii, 2024, 45(3): 997-1009.
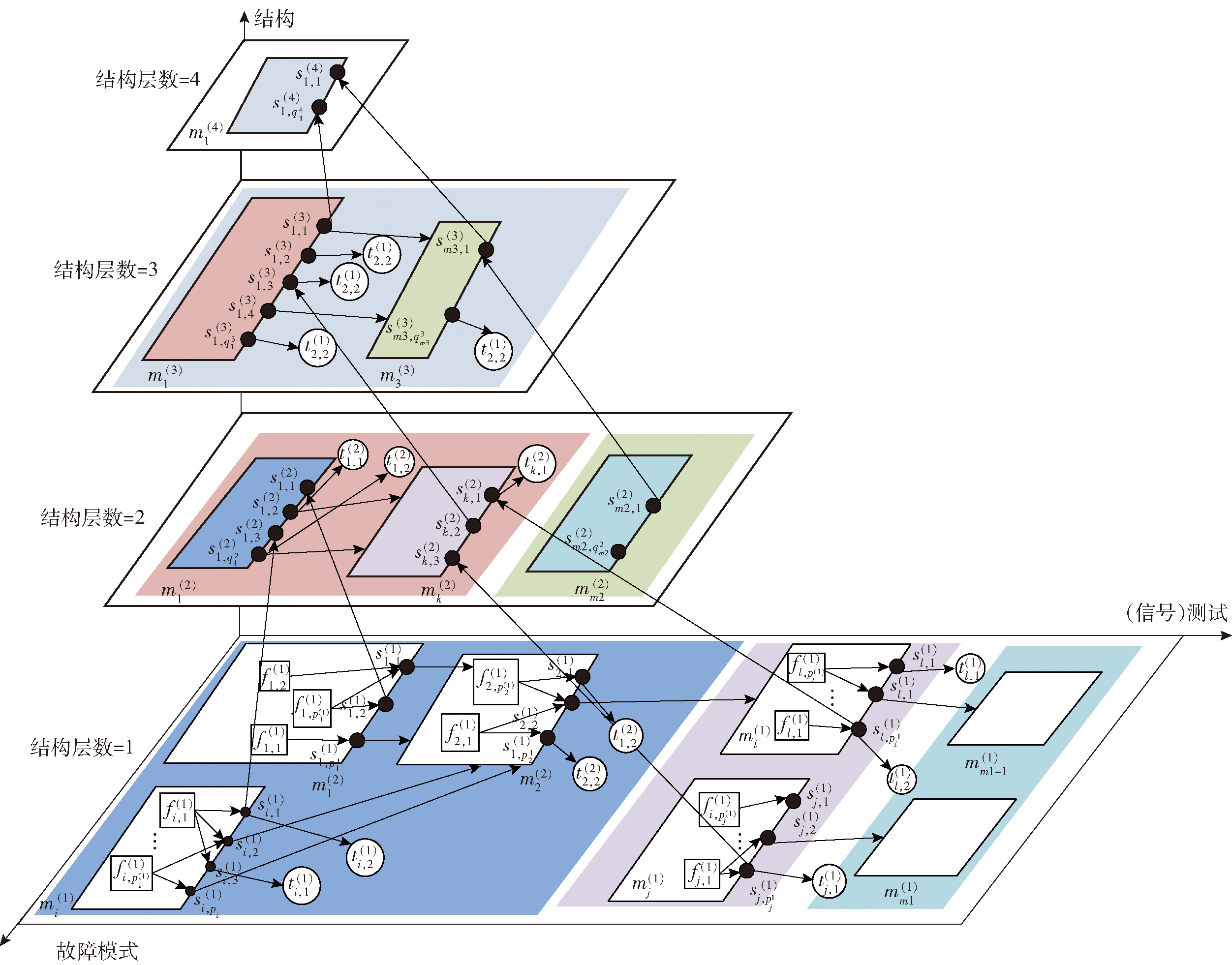
图1 可诊断性评估模型示意图
Fig.1 Schematic diagram of diagnosability evaluation model
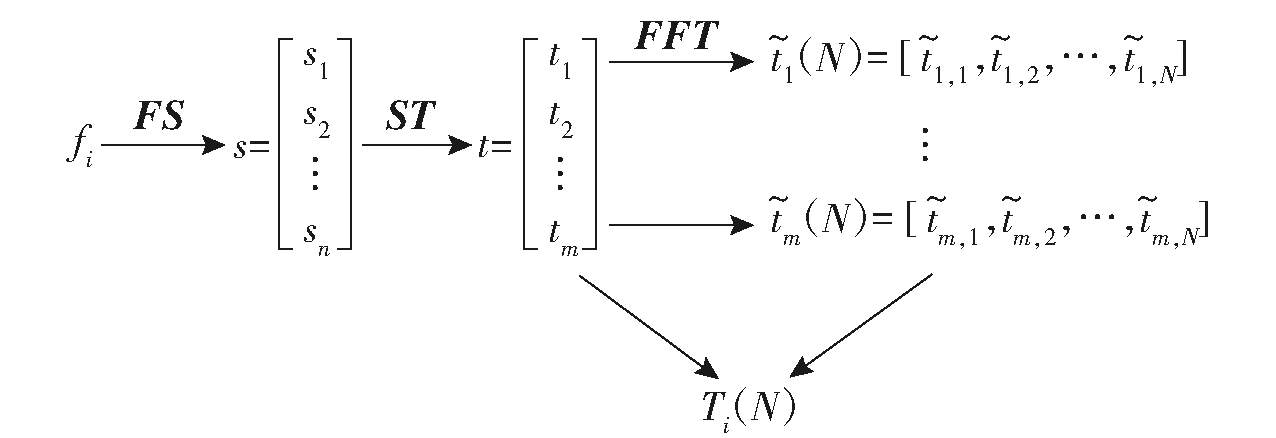
图2 故障与测试集影响关系逻辑示意图
Fig.2 Schematic diagram of the relationship between fault and test set effect
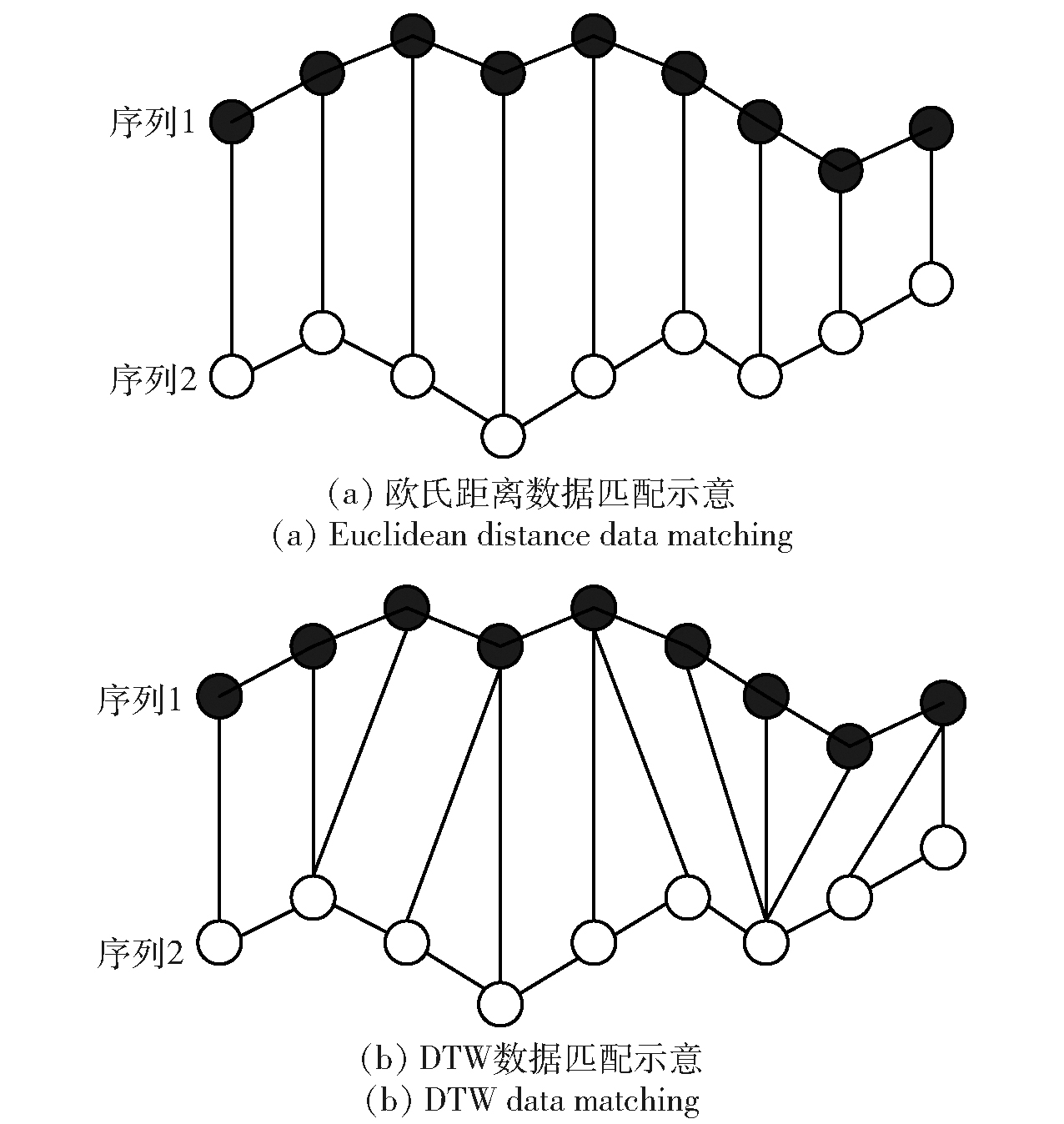
图3 欧氏距离与DTW数据匹配示意图
Fig.3 Schematic diagram of Euclidean distance and DTW data matching

图4 序列点配对过程
Fig.4 Pairing process of sequence points
| 符号 | 释义 |
|---|---|
| L | 动量轮电机电枢电感 |
| R | 动量轮电机点枢电阻 |
| i(t) | 流过电机电枢的电流 |
| u(t) | 电机驱动电压 |
| e(t) | 电机反电动势 |
| me(t) | 动量轮机电转换输出力矩 |
| Km | 动量轮电机转矩系数 |
| md(t) | 电机输出力矩 |
| mf(t) | 摩擦力矩 |
| mx(t) | 干扰力矩 |
| ω(t) | 电机转速 |
| Ja | 电机转子自身转动惯量 |
| Ja | 飞轮本体转动惯量 |
| Ke | 电势系数 |
| m0 | 动量轮静摩擦力矩 |
| Kf | 动量轮摩擦系数 |
| u | 驱动电压 |
| umax | 电压限幅环节上限 |
| umin | 电压限幅环节下限 |
表1 动量轮仿真模型符号释义及参数取值
Table 1 Symbolic interpretation and parameter values of momentum wheel simulation model
| 符号 | 释义 |
|---|---|
| L | 动量轮电机电枢电感 |
| R | 动量轮电机点枢电阻 |
| i(t) | 流过电机电枢的电流 |
| u(t) | 电机驱动电压 |
| e(t) | 电机反电动势 |
| me(t) | 动量轮机电转换输出力矩 |
| Km | 动量轮电机转矩系数 |
| md(t) | 电机输出力矩 |
| mf(t) | 摩擦力矩 |
| mx(t) | 干扰力矩 |
| ω(t) | 电机转速 |
| Ja | 电机转子自身转动惯量 |
| Ja | 飞轮本体转动惯量 |
| Ke | 电势系数 |
| m0 | 动量轮静摩擦力矩 |
| Kf | 动量轮摩擦系数 |
| u | 驱动电压 |
| umax | 电压限幅环节上限 |
| umin | 电压限幅环节下限 |

图5 动量轮Simulink仿真
Fig.5 Simulink simulation of momentum wheel
| 故障 | 故障名称 |
|---|---|
| f0 | 正常情况 |
| f1 | 动量轮增益下降 |
| f2 | 空转故障 |
| f3 | 摩擦故障 |
| f4 | 堵转故障 |
表2 动量轮仿真故障
Table 2 Fault modes of momentum wheel
| 故障 | 故障名称 |
|---|---|
| f0 | 正常情况 |
| f1 | 动量轮增益下降 |
| f2 | 空转故障 |
| f3 | 摩擦故障 |
| f4 | 堵转故障 |
| 编号 | 故障信号名称 |
|---|---|
| s1 | 电机电流 |
| s2 | 动量轮转速 |
| s3 | 电机转矩 |
| s4 | 动量轮转矩 |
| s5 | 摩擦力矩 |
表3 动量轮信号
Table 3 Simulation faults of momentum wheel
| 编号 | 故障信号名称 |
|---|---|
| s1 | 电机电流 |
| s2 | 动量轮转速 |
| s3 | 电机转矩 |
| s4 | 动量轮转矩 |
| s5 | 摩擦力矩 |
| 编号 | 测试 |
|---|---|
| t1 | 电机电流测试 |
| t2 | 动量轮转速测试 |
| t3 | 电机转矩测试 |
| t4 | 动量轮转矩测试 |
表4 动量轮测试
Table 4 Simulation faults of momentum wheel
| 编号 | 测试 |
|---|---|
| t1 | 电机电流测试 |
| t2 | 动量轮转速测试 |
| t3 | 电机转矩测试 |
| t4 | 动量轮转矩测试 |

图6 动量轮可诊断性评估模型
Fig.6 Momentum wheel diagnosability evaluation model
| 故障模式 | 信号 | |||
|---|---|---|---|---|
| ω | i | md | me | |
| f1 | 148.06 | 23.92 | 199.15 | 191.38 |
| f2 | 864.78 | 22.52 | 815.65 | 817.80 |
| f3 | 21.55 | 23.05 | 24.04 | 22.81 |
| f4 | 861.88 | 23.31 | 803.13 | 791.18 |
表5 不同故障模式不同信号下的可检测性度量情况
Table 5 Detectability metrics for different failure modes under different signals
| 故障模式 | 信号 | |||
|---|---|---|---|---|
| ω | i | md | me | |
| f1 | 148.06 | 23.92 | 199.15 | 191.38 |
| f2 | 864.78 | 22.52 | 815.65 | 817.80 |
| f3 | 21.55 | 23.05 | 24.04 | 22.81 |
| f4 | 861.88 | 23.31 | 803.13 | 791.18 |
| 故障模式 | f1 | f2 | f3 | f4 |
|---|---|---|---|---|
| 故障检测性 | 199.15 | 864.78 | 24.04 | 861.88 |
表6 故障模式故障检测性评价
Table 6 Fault detectability evaluation of different fault modes
| 故障模式 | f1 | f2 | f3 | f4 |
|---|---|---|---|---|
| 故障检测性 | 199.15 | 864.78 | 24.04 | 861.88 |
| 故障模式 | f1 | f2 | f3 | f4 |
|---|---|---|---|---|
| f1 | 0 | 505.99 | 191.24 | 503.14 |
| f2 | ω | 0 | 843.11 | 23.16 |
| f3 | me | ω | 0 | 840.20 |
| f4 | ω | i | ω | 0 |
表7 故障模式隔离性评价
Table 7 Fault isolation evaluation of different fault modes
| 故障模式 | f1 | f2 | f3 | f4 |
|---|---|---|---|---|
| f1 | 0 | 505.99 | 191.24 | 503.14 |
| f2 | ω | 0 | 843.11 | 23.16 |
| f3 | me | ω | 0 | 840.20 |
| f4 | ω | i | ω | 0 |
| 序号 | 算子选择 | 信号是否 处理 | 备注 |
|---|---|---|---|
| 1 | 欧式距离 | 是 | 以下简称A方法 |
| 2 | EDR | 是 | 以下简称B方法,精度为0.1 |
| 3 | EDR | 是 | 以下简称C方法,精度为0.5 |
| 4 | Wasserstein距离 | 是 | 以下简称D方法 |
| 5 | DTW | 否 | 以下简称E方法 |
| 6 | Frechet距离 | 否 | 以下简称F方法 |
| 7 | DTW | 是 | 本文方法,以下简称G方法 |
表8 故障可诊断性评价算法说明
Table 8 Fault diagnosability evaluation algorithm description
| 序号 | 算子选择 | 信号是否 处理 | 备注 |
|---|---|---|---|
| 1 | 欧式距离 | 是 | 以下简称A方法 |
| 2 | EDR | 是 | 以下简称B方法,精度为0.1 |
| 3 | EDR | 是 | 以下简称C方法,精度为0.5 |
| 4 | Wasserstein距离 | 是 | 以下简称D方法 |
| 5 | DTW | 否 | 以下简称E方法 |
| 6 | Frechet距离 | 否 | 以下简称F方法 |
| 7 | DTW | 是 | 本文方法,以下简称G方法 |
| 方法 | 故障 | 可检测性 | 可隔离性 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| f1 | f2 | f3 | f4 | |||||||
| f1 | 1.44 | 13.15 | 13.06 | 13.14 | 13.15 | 0 | 18.62 | 13.04 | 18.47 | |
| A方法 | f2 | 1.42 | 31.64 | 31.64 | 31.64 | 31.64 | me | 0 | 30.78 | 1.43 |
| f3 | 1.41 | 1.76 | 1.40 | 1.67 | 1.76 | me | ω | 0 | 31.00 | |
| f4 | 1.40 | 31.42 | 31.02 | 31.57 | 31.57 | ω | i | me | 0 | |
| f1 | 12 | 646 | 654 | 706 | 706 | 0 | 904 | 684 | 902 | |
| B方法 | f2 | 19 | 832 | 839 | 926 | 926 | ω | 0 | 923 | 19 |
| f3 | 19 | 32 | 23 | 29 | 32 | ω | ω | 0 | 922 | |
| f4 | 19 | 844 | 839 | 926 | 926 | ω | i | ω | 0 | |
| f1 | 0 | 309 | 315 | 242 | 315 | 0 | 503 | 312 | 503 | |
| C方法 | f2 | 0 | 622 | 626 | 704 | 704 | ω | 0 | 700 | 0 |
| f3 | 0 | 0 | 0 | 0 | 0 | me | ω | 0 | 698 | |
| f4 | 0 | 624 | 623 | 703 | 703 | ω | ω | 0 | ||
| f1 | 0.005 9 | 0.34 | 0.34 | 0.35 | 0.35 | 0 | 0.51 | 0.34 | 0.50 | |
| D方法 | f2 | 0.005 7 | 0.81 | 0.82 | 0.86 | 0.86 | ω | 0 | 0.84 | 0.02 |
| f3 | 0.006 3 | 0.03 | 0.006 | 0.02 | 0.03 | ω | ω | 0 | 0.84 | |
| f4 | 0.006 0 | 0.81 | 0.80 | 0.86 | 0.86 | ω | me | ω | 0 | |
| f1 | 308.47 | 130.08 | 125.88 | 196 380 | 196 380 | 0 | 671 320 | 176 180 | 667 550 | |
| E方法 | f2 | 290.44 | 532.77 | 537.89 | 1 147 400 | 1 147 400 | ω | 0 | 1 118 600 | 3 039.1 |
| f3 | 297.28 | 15.70 | 15.00 | 28 588 | 28 588 | ω | ω | 0 | 1 114 700 | |
| f4 | 300.66 | 524.59 | 520.39 | 1 143 500 | 1 143 500 | ω | ω | ω | 0 | |
| f1 | 1.24 | 0.49 | 0.47 | 981.27 | 981.27 | 0 | 1 401 | 872.44 | 1 396 | |
| F方法 | f2 | 1.03 | 1.13 | 1.12 | 2375 | 2375 | ω | 0 | 2 273.4 | 4.947 0 |
| f3 | 1.09 | 0.06 | 0.05 | 142.83 | 142.83 | ω | ω | 0 | 2 268.5 | |
| f4 | 1.16 | 1.11 | 1.10 | 2370.1 | 2370.1 | ω | ω | ω | 0 | |
| G方法 | 详见 | 详见 | ||||||||
表9 不同方法可诊断性评价结果
Table 9 Evaluated results of different diagnosability evaluation methods
| 方法 | 故障 | 可检测性 | 可隔离性 | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| f1 | f2 | f3 | f4 | |||||||
| f1 | 1.44 | 13.15 | 13.06 | 13.14 | 13.15 | 0 | 18.62 | 13.04 | 18.47 | |
| A方法 | f2 | 1.42 | 31.64 | 31.64 | 31.64 | 31.64 | me | 0 | 30.78 | 1.43 |
| f3 | 1.41 | 1.76 | 1.40 | 1.67 | 1.76 | me | ω | 0 | 31.00 | |
| f4 | 1.40 | 31.42 | 31.02 | 31.57 | 31.57 | ω | i | me | 0 | |
| f1 | 12 | 646 | 654 | 706 | 706 | 0 | 904 | 684 | 902 | |
| B方法 | f2 | 19 | 832 | 839 | 926 | 926 | ω | 0 | 923 | 19 |
| f3 | 19 | 32 | 23 | 29 | 32 | ω | ω | 0 | 922 | |
| f4 | 19 | 844 | 839 | 926 | 926 | ω | i | ω | 0 | |
| f1 | 0 | 309 | 315 | 242 | 315 | 0 | 503 | 312 | 503 | |
| C方法 | f2 | 0 | 622 | 626 | 704 | 704 | ω | 0 | 700 | 0 |
| f3 | 0 | 0 | 0 | 0 | 0 | me | ω | 0 | 698 | |
| f4 | 0 | 624 | 623 | 703 | 703 | ω | ω | 0 | ||
| f1 | 0.005 9 | 0.34 | 0.34 | 0.35 | 0.35 | 0 | 0.51 | 0.34 | 0.50 | |
| D方法 | f2 | 0.005 7 | 0.81 | 0.82 | 0.86 | 0.86 | ω | 0 | 0.84 | 0.02 |
| f3 | 0.006 3 | 0.03 | 0.006 | 0.02 | 0.03 | ω | ω | 0 | 0.84 | |
| f4 | 0.006 0 | 0.81 | 0.80 | 0.86 | 0.86 | ω | me | ω | 0 | |
| f1 | 308.47 | 130.08 | 125.88 | 196 380 | 196 380 | 0 | 671 320 | 176 180 | 667 550 | |
| E方法 | f2 | 290.44 | 532.77 | 537.89 | 1 147 400 | 1 147 400 | ω | 0 | 1 118 600 | 3 039.1 |
| f3 | 297.28 | 15.70 | 15.00 | 28 588 | 28 588 | ω | ω | 0 | 1 114 700 | |
| f4 | 300.66 | 524.59 | 520.39 | 1 143 500 | 1 143 500 | ω | ω | ω | 0 | |
| f1 | 1.24 | 0.49 | 0.47 | 981.27 | 981.27 | 0 | 1 401 | 872.44 | 1 396 | |
| F方法 | f2 | 1.03 | 1.13 | 1.12 | 2375 | 2375 | ω | 0 | 2 273.4 | 4.947 0 |
| f3 | 1.09 | 0.06 | 0.05 | 142.83 | 142.83 | ω | ω | 0 | 2 268.5 | |
| f4 | 1.16 | 1.11 | 1.10 | 2370.1 | 2370.1 | ω | ω | ω | 0 | |
| G方法 | 详见 | 详见 | ||||||||
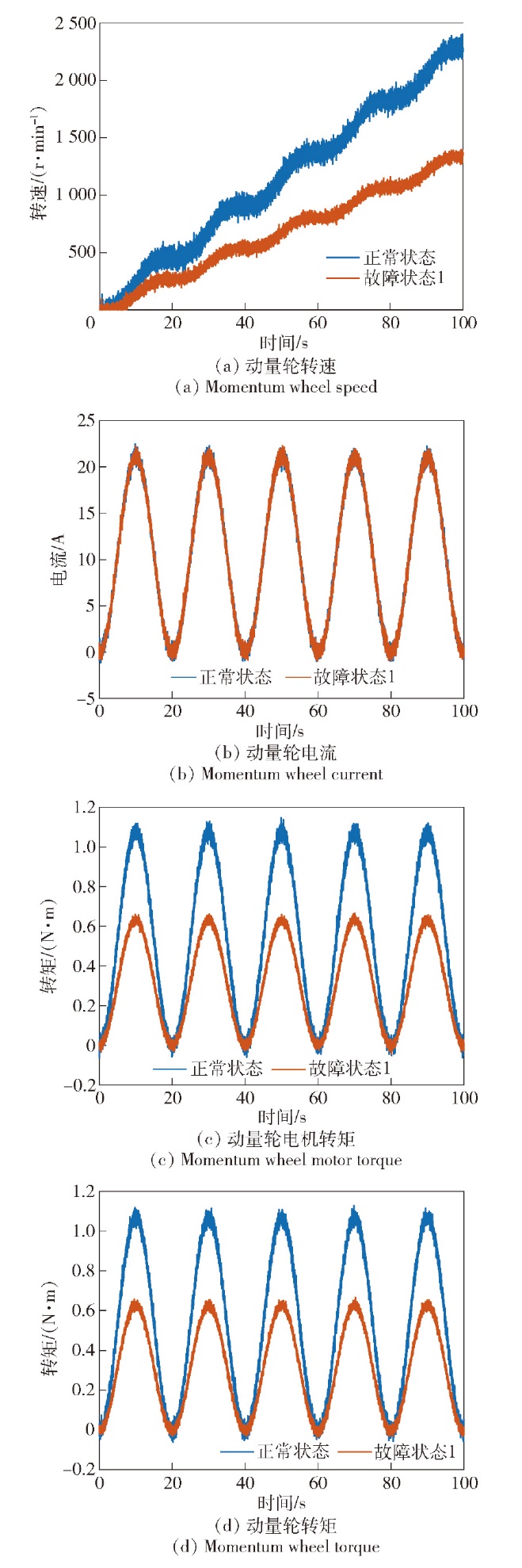
图7 正常状态及故障状态1动量轮测量信号
Fig.7 Measured signals of omentum wheel under normal state and Fault 1
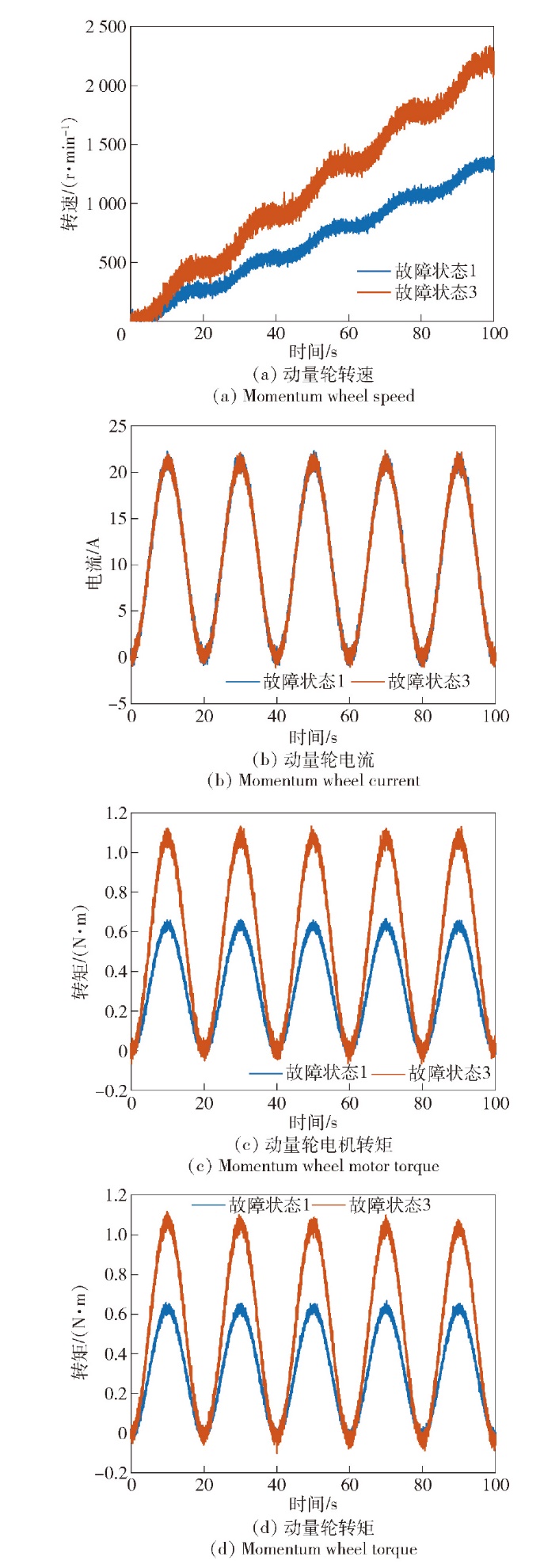
图8 故障状态1及故障状态3动量轮测量信号
Fig.8 Measured signals of momentum wheel under Faults 1 and 3
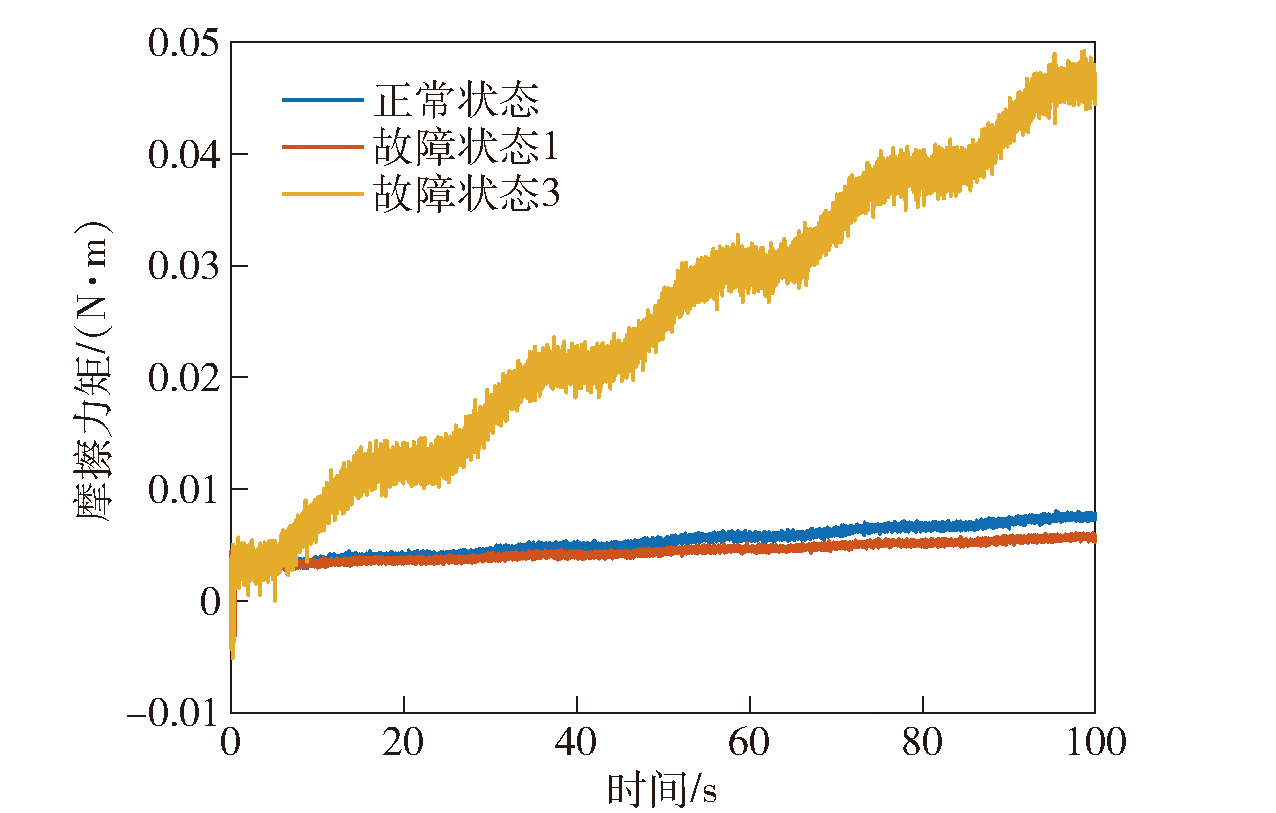
图9 动量轮摩擦力矩
Fig.9 Friction torque of momentum wheel
| [1] |
张宁, 林海华, 孙亚平, 等. 鱼雷装备测试维修Petri网模型与指标论证分析[J]. 兵工学报, 2023, 44(3): 886-894.
|
|
|
|
| [2] |
王大轶, 符方舟, 刘成瑞, 等. 控制系统可诊断性的内涵与研究综述[J]. 自动化学报, 2018, 44(9): 1537-1553.
|
|
|
|
| [3] |
符方舟, 王大轶, 李文博. 复杂动态系统的实际非完全失效故障的可诊断性评估[J]. 自动化学报, 2017, 43(11): 1941-1949.
|
|
|
|
| [4] |
李文博, 王大轶, 刘成瑞. 有干扰的控制系统故障可诊断性量化评估[J]. 控制理论与应用, 2015, 32(6): 744-752.
|
|
|
|
| [5] |
李文博, 王大轶, 刘成瑞. 卫星姿态控制系统的故障可诊断性评价研究[J]. 空间控制技术与应用, 2014, 40(5): 8-13.
|
|
|
|
| [6] |
李文博, 王大轶, 刘成瑞. 一类非线性系统的故障可诊断性量化评价方法[J]. 宇航学报, 2015, 36(4): 455-462.
|
|
|
|
| [7] |
doi: 10.23919/JSEE.5971804 URL |
| [8] |
doi: 10.1109/TAC.9 URL |
| [9] |
doi: 10.1016/j.mcm.2006.06.008 URL |
| [10] |
刘文静, 李文博, 张秀云, 等. 基于图论的深空探测航天器故障可诊断性评价[J]. 控制理论与应用, 2019, 36(12): 2074-2084.
|
|
|
|
| [11] |
刘成瑞, 刘文静, 王南华, 等. 基于相关性模型的液浮陀螺可诊断性分析方法[J]. 空间控制技术与应用, 2013, 39(1): 10-14,22.
|
|
|
|
| [12] |
|
| [13] |
doi: 10.1109/TCYB.2020.3027549 URL |
| [14] |
doi: 10.1016/j.jprocont.2014.06.014 URL |
| [15] |
doi: 10.1021/ie000141+ URL |
| [16] |
蒋栋年. 非线性系统故障可诊断性评价及诊断方法研究[D]. 兰州: 兰州理工大学, 2018.
|
|
|
|
| [17] |
蒋栋年, 李炜, 王君. 非线性系统故障可诊断性量化评价及诊断方法[J]. 华中科技大学学报(自然科学版), 2016, 44(12): 102-108.
|
|
|
|
| [18] |
李炫承. 变工况和背景噪声影响下的故障响应表征及相似性度量[D]. 北京: 北京交通大学, 2019.
|
|
|
|
| [19] |
化永朝, 李清东, 任章, 等. 连续系统故障可诊断性评价方法综述[J]. 控制与决策, 2016, 31(12): 2113-2121.
|
|
|
|
| [20] |
汪俊. 基于VMD-DTW聚类的小电流接地系统故障选线方法[D]. 宜昌: 三峡大学, 2021.
|
|
|
|
| [21] |
崔白云. 卫星动量轮故障检测与诊断方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2016.
|
|
|
|
| [22] |
陈非凡, 张高飞, 陈益峰. 小卫星动量轮非线性特性建模与仿真方法[J]. 宇航学报, 2003, 24(6):651-655.
|
|
|
|
| [23] |
田科丰, 李明航. 基于自适应观测器的飞轮故障诊断物理仿真[J]. 空间控制技术与应用, 2010, 36(6): 27-32.
|
|
|
|
| [24] |
刘洋. 基于Wasserstein距离的目标相似性度量算法[D]. 杭州: 杭州电子科技大学, 2019.
|
|
|
|
| [25] |
邱景, 欧津东, 谢冬, 等. 基于正交基函数-编辑距离的低信噪比下磁异常信号相似度度量方法[J]. 电子与信息学报, 2022, 44(2):745-753.
|
|
|
| [1] | 蒋栋年, 李炜. 混合信息熵约束下的电源车传感器优化配置方法[J]. 兵工学报, 2022, 43(8): 1763-1771. |
| [2] | 帅勇, 宋太亮, 王建平, 沈洪. 一种改进的装备保障能力并联预测模型[J]. 兵工学报, 2016, 37(6): 1089-1095. |
| [3] | 黄静, 李长春, 延皓, 赵旭昌, 杨雪松. 多尺度直线拟合法在时间序列突变点检测中的应用[J]. 兵工学报, 2015, 36(6): 1110-1116. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4