
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (S1): 250454-.doi: 10.12382/bgxb.2025.0454
Previous Articles Next Articles
YANG Zhilai, LI Kena*( ), CHEN Zhaowen, LIU Rui
), CHEN Zhaowen, LIU Rui
Received:2025-06-04
Online:2025-11-06
Contact:
LI Kena
YANG Zhilai, LI Kena, CHEN Zhaowen, LIU Rui. Design of Searching and positioning UAV System for Persons in Distress[J]. Acta Armamentarii, 2025, 46(S1): 250454-.
Add to citation manager EndNote|Ris|BibTeX
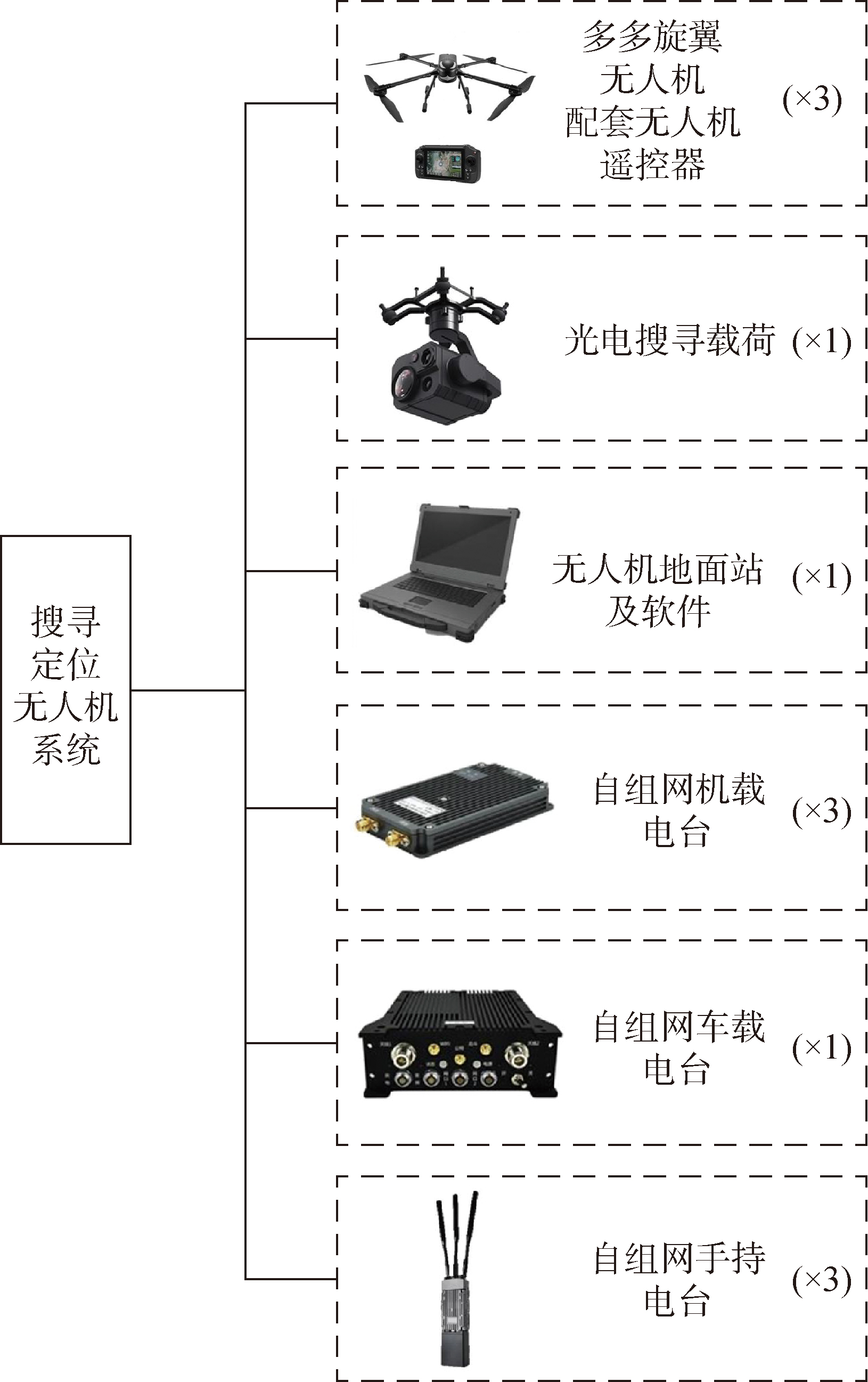
Fig.1 System block diagram
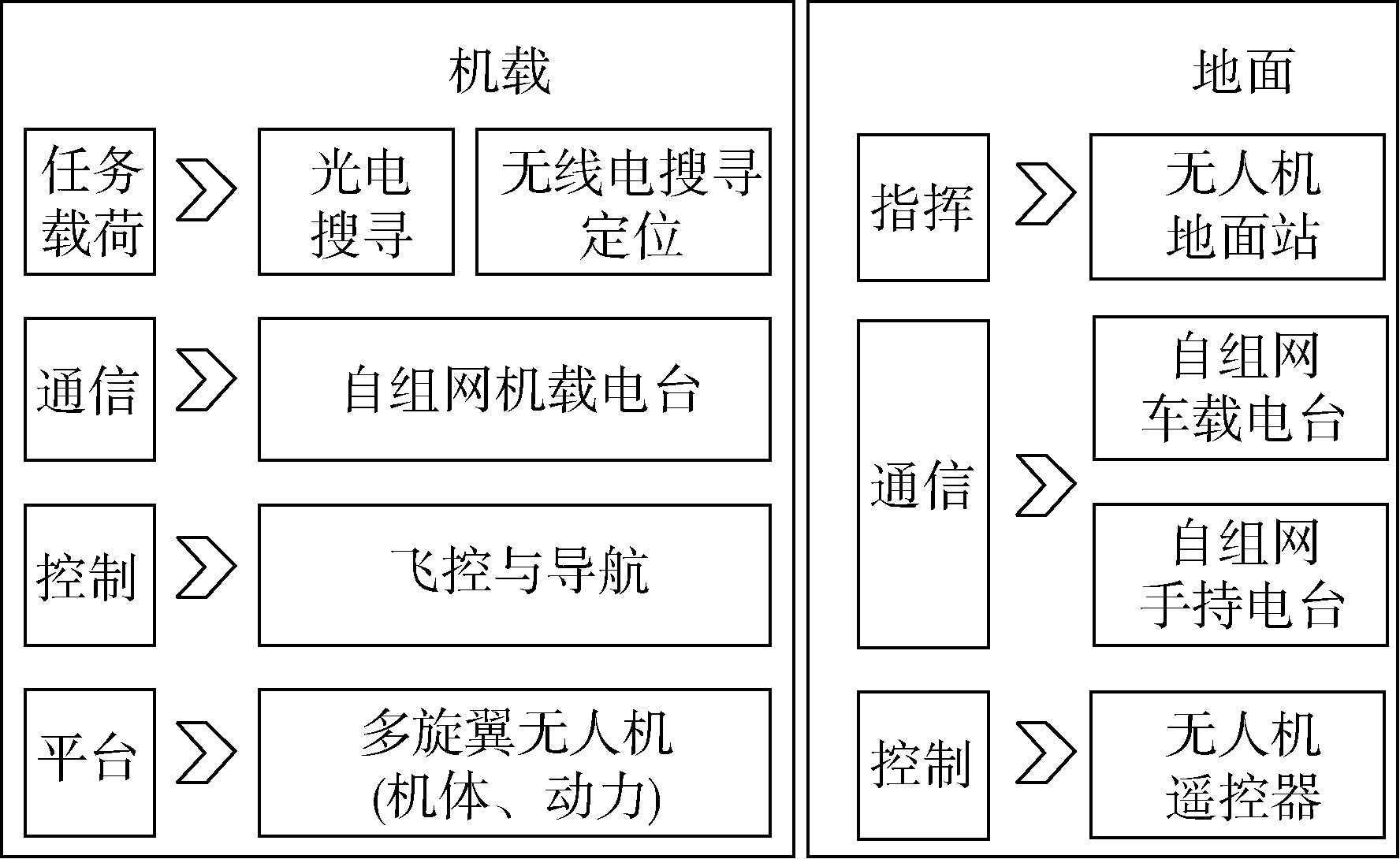
Fig.2 System hardware architecture

Fig.3 System work procedure
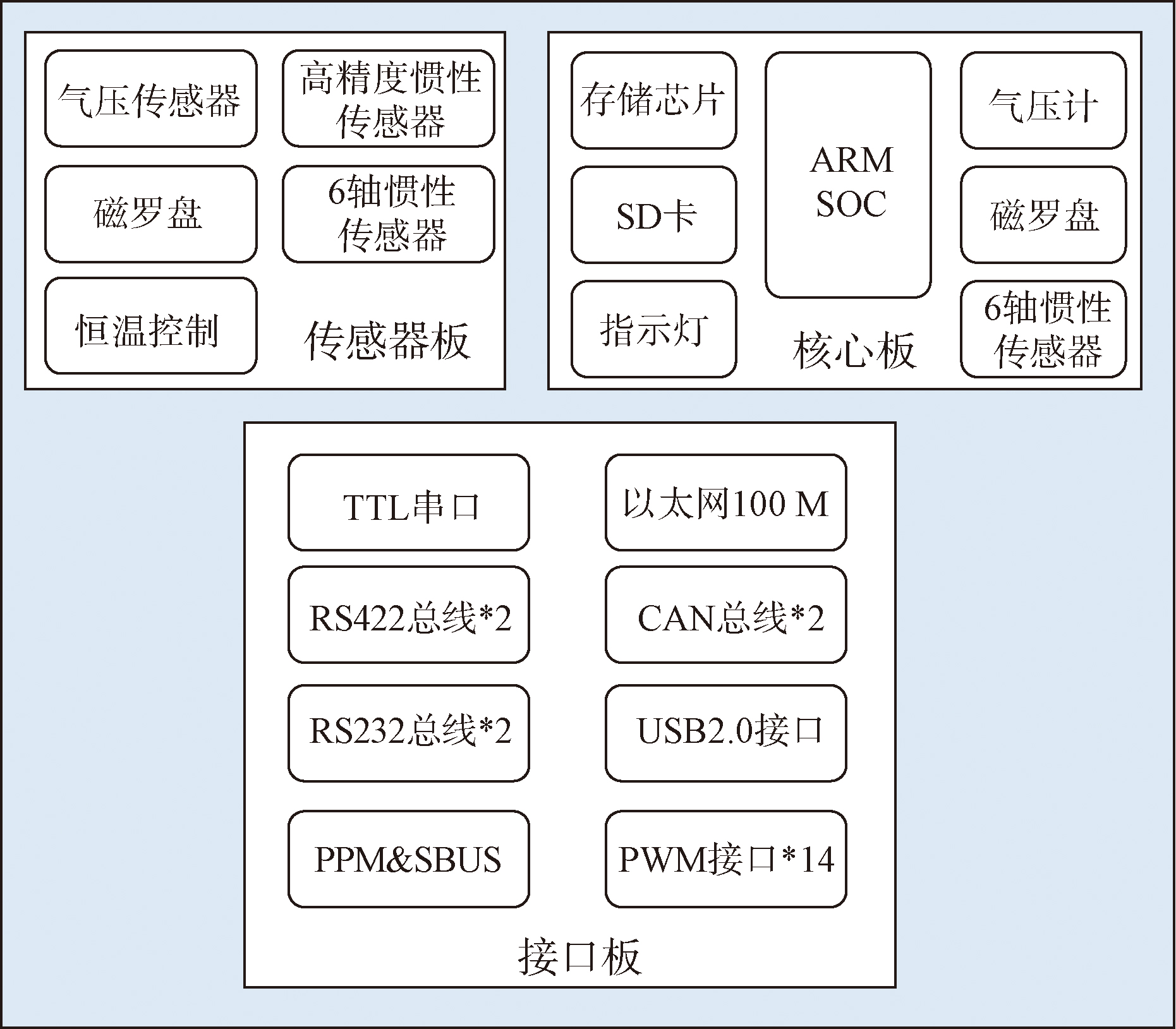
Fig.4 System framework
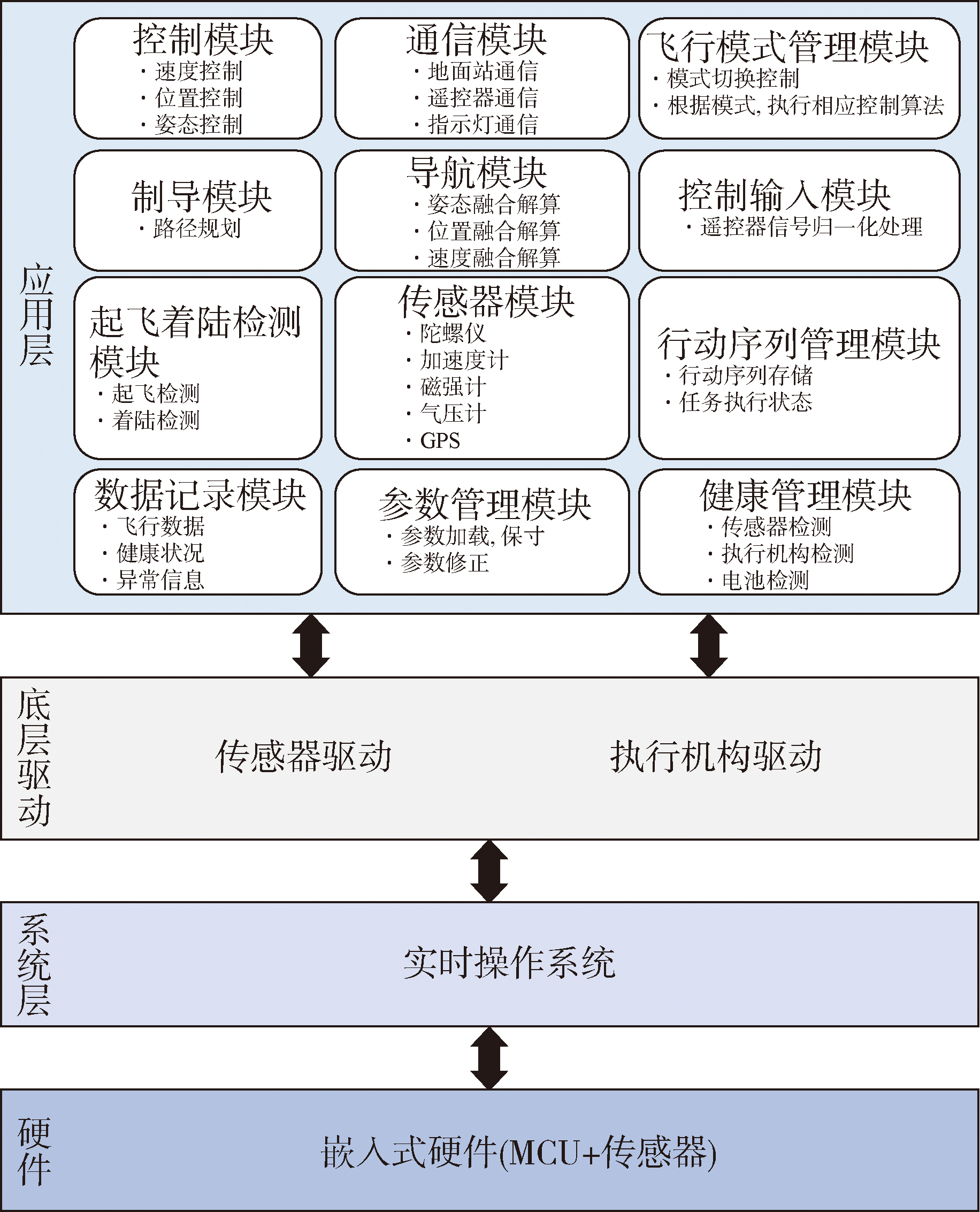
Fig.5 Software architecture
| 性能参数 | 值 |
|---|---|
| 测距范围 | 5~1000m |
| 波长范围 | 900~908nm |
| 分辨率 | 0.1m |
| 测量精度 | 3~100m(±1m) 100~800m(±1+L×0.25%m,L为到目标距离) |
| 激光脉冲频率 | 3Hz |
| 最大激光功率 | 5mW |
Table 1 Performance parameters of laser rangefinder
| 性能参数 | 值 |
|---|---|
| 测距范围 | 5~1000m |
| 波长范围 | 900~908nm |
| 分辨率 | 0.1m |
| 测量精度 | 3~100m(±1m) 100~800m(±1+L×0.25%m,L为到目标距离) |
| 激光脉冲频率 | 3Hz |
| 最大激光功率 | 5mW |

Fig.6 Hardware architecture
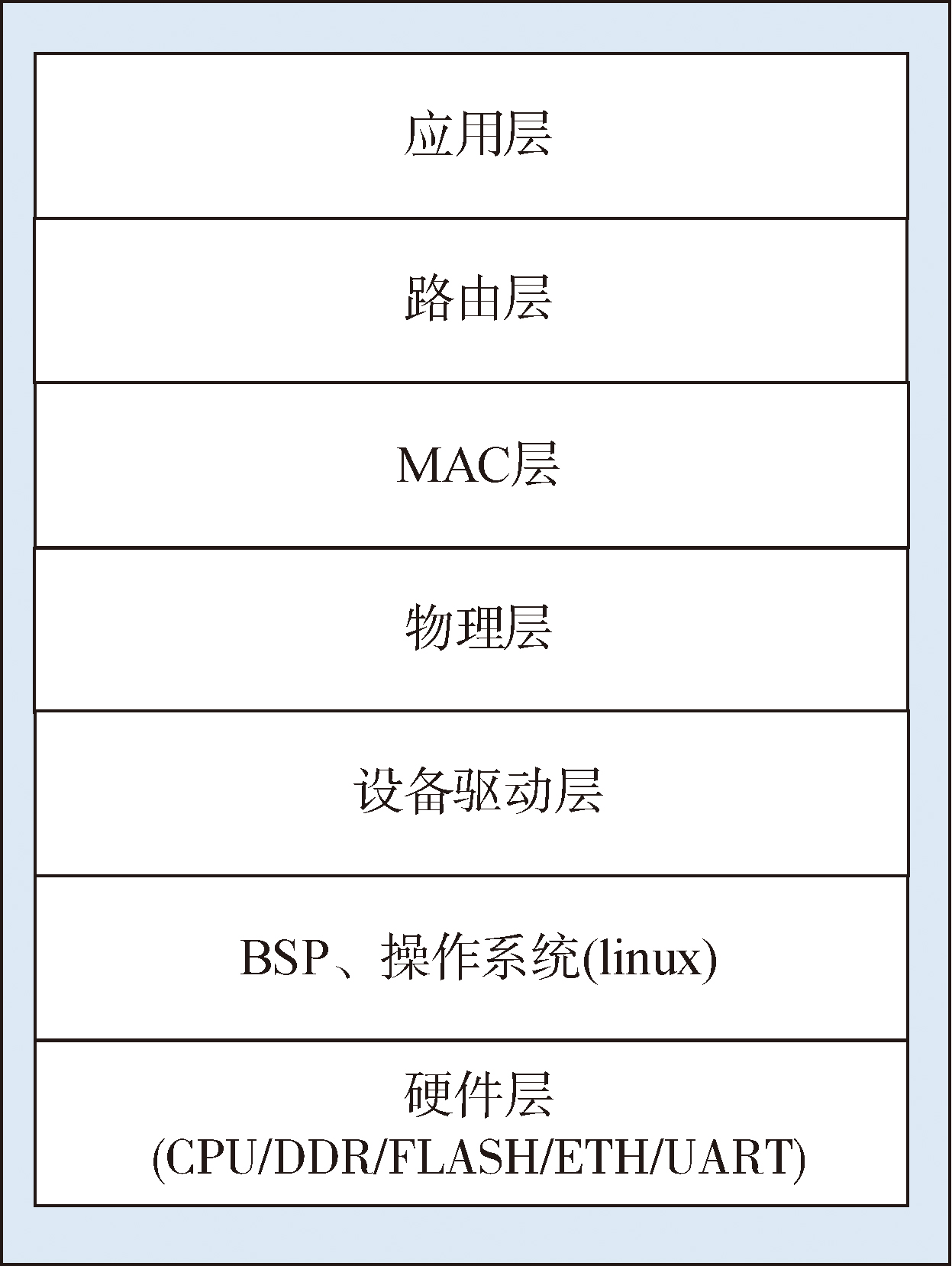
Fig.7 Software structure
| 处理器 | 采用Intel Core i7-7820HK,四核八线程处理器,配置高,性能强;主频是2.9GHz |
|---|---|
| 内存 | 内存DDR4,32GB |
| 硬盘 | 采用SSD固态硬盘,容量512GB |
| 显卡 | 采用Nvidia GTX950M独立显卡,显存2GB |
| 显示器 | 采用15.6寸LED液晶显示屏,分辨率是1920×1080 |
| 电池 | 内置不小于140Wh智能锂电池组,工作时间可达3h,待机时间不小于120h |
| 接口特性 | 含有多种标准接口,包括2个USB3.0接口,2个USB2.0接口,2个RJ45千兆网口,1个HDMI接口,1个BIOS可调COM口,1组耳机麦克接口 |
| 电源输入 | 采用DC 19V的电源输入(航插接口),可适配直流电源输入:18~32V,外置AC 220V电源适配器,可适配交流电源输入:220V |
| 重量 | 总重量4.9kg |
Table 2 Parameters of UAV ground station
| 处理器 | 采用Intel Core i7-7820HK,四核八线程处理器,配置高,性能强;主频是2.9GHz |
|---|---|
| 内存 | 内存DDR4,32GB |
| 硬盘 | 采用SSD固态硬盘,容量512GB |
| 显卡 | 采用Nvidia GTX950M独立显卡,显存2GB |
| 显示器 | 采用15.6寸LED液晶显示屏,分辨率是1920×1080 |
| 电池 | 内置不小于140Wh智能锂电池组,工作时间可达3h,待机时间不小于120h |
| 接口特性 | 含有多种标准接口,包括2个USB3.0接口,2个USB2.0接口,2个RJ45千兆网口,1个HDMI接口,1个BIOS可调COM口,1组耳机麦克接口 |
| 电源输入 | 采用DC 19V的电源输入(航插接口),可适配直流电源输入:18~32V,外置AC 220V电源适配器,可适配交流电源输入:220V |
| 重量 | 总重量4.9kg |
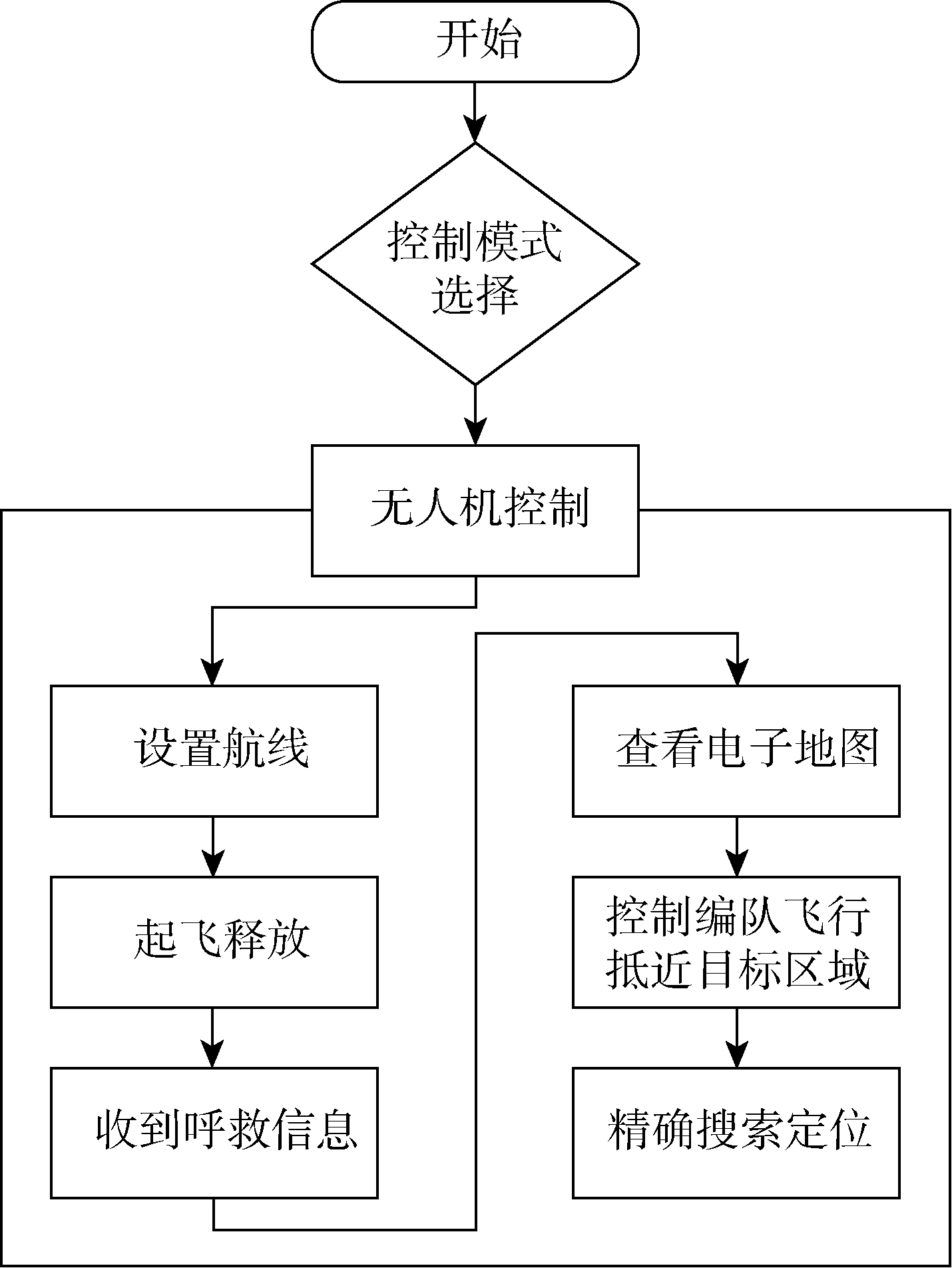
Fig.8 Software use process of UAV ground station
| [1] |
张世月, 赵新华, 苏卫华, 等. 救援机器人单纵臂式悬架设计与仿真[J]. 军事医学, 2018, 42(1):21-25.
|
|
|
|
| [2] |
钟伟雄, 韦凤, 邹仁, 等. 无人机概论[M]. 北京: 清华大学出版社, 2019.
|
|
|
|
| [3] |
袁成, 董晓琳, 朱超磊. 2020年国外先进军用无人机技术发展综述[J]. 飞航导弹, 2021(1):17-24.
|
|
|
|
| [4] |
沈陶然, 桑隽永. 国外无人机装备发展现状及典型作战模式综述[J]. 新型工业化, 2018(5):94-97.
|
|
|
|
| [5] |
刘森, 姜雪松, 张宇晨, 等. 林火搜救多无人机协同任务分配方法[J]. 中国新技术新产品, 2024(6):133-136.
|
|
|
|
| [6] |
杨阳, 罗婷, 唐伟革, 等. 多旋翼无人机在医学救援领域的应用研究[J]. 医疗卫生装备, 2018, 39(6):91-95.
|
|
|
|
| [7] |
史耀军, 周慧, 王新宇. 基于CMF的火灾救援无人机研究[J]. 设计, 2020, 33(20):106-108.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
陈万意. 无人机电力线路安全巡检系统及关键技术[J]. 智能城市,智能城市, 2021, 7(17):59-60.
|
|
|
|
| [11] |
阎靖宇, 谢永华. 基于YOLOv7-Tiny算法的无人机实时跟踪野生动物方法[J]. 野生动物学报, 2024, 45(2):251-261.
|
|
|
|
| [12] |
|
| [13] |
杨梅枝, 李伟业. 以色列军队无人机发展现状及基本经验[J]. 飞航导弹, 2021(3):53-56.
|
|
|
|
| [14] |
徐毓蔓. 航空搜索救援任务下城市应急救援装备配备分析[J]. 科技创新导报, 2018, 15(3):200-201.
|
|
|
|
| [15] |
郎需义, 张铄. 海上无人机搜救任务构型分析与研究[J]. 水上安全, 2023(10):4-6.
|
|
|
|
| [16] |
刘子昂. 小型无人机在海上搜救活动中的应用研究[J]. 水上安全, 2024(3):13-15.
|
|
|
|
| [17] |
粟智. 无人机在海上救援行动中的应用现状及发展探究[J]. 中国设备工程, 2021(11):242-243.
|
|
|
|
| [18] |
张建卫. 无人机在西藏地区高原雪山人员搜救中的应用探讨[J]. 今日消防, 2022, 7(6):4-7.
|
|
|
|
| [19] |
徐箭, 项有群. 无人机水上遇险搜救关键技术研究[J]. 水上安全, 2023(8):13-15.
|
|
|
|
| [20] |
王睿麟. 基于无人机的海上搜救识别系统设计[J]. 技术与市场, 2022, 29(7):100-102.
|
|
|
|
| [21] |
程翔, 杜军. 基于红外感应技术的海上即时搜救无人机设计[J]. 设计, 2024, 37(12):112-115.
|
|
|
|
| [22] |
邱琦, 苏卫华, 文曦, 等. 便携式折叠翼搜救无人机设计与仿真[J]. 军事医学, 2024, 48(2):136-142.
doi: 10.7644/j.issn.1674-9960.2024.02.009 |
|
doi: 10.7644/j.issn.1674-9960.2024.02.009 |
| [1] | CHEN Fawei, CHEN Song, WANG Sheng, LIU Chencheng, YUE Jiaying. A Method for UAV Cooperative Jamming Task Allocation based on HPSO Algorithm [J]. Acta Armamentarii, 2025, 46(S1): 250142-. |
| [2] | LI Keting, ZHAO Zijie, YING Zhanfeng, SHEN Shiqi. Cross-layer Dynamic Detection Network for Small Target Detection in Aerial Photography [J]. Acta Armamentarii, 2025, 46(S1): 250399-. |
| [3] | ZHANG Pei, ZHANG An, BI Wenhao, MAO Zeming. A Maneuver Strategy of UAV to Evade a Medium-long Range Air-to-air Missile in Terminal Guidance [J]. Acta Armamentarii, 2025, 46(9): 240972-. |
| [4] | ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm [J]. Acta Armamentarii, 2025, 46(8): 240997-. |
| [5] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [6] | ZHOU Le, YIN Qiaozhi, ZHONG Peilin, WEI Xiaohui, NIE Hong. Autonomous UAV Location Selection Technique Based on Data Fusion [J]. Acta Armamentarii, 2025, 46(8): 240751-. |
| [7] | SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing [J]. Acta Armamentarii, 2025, 46(7): 240797-. |
| [8] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [9] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [10] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [11] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [12] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [13] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [14] | HOU Tianle, BI Wenhao, HUANG Zhanjun, LI Minghao, ZHANG An. Prescribed-time Formation Control with Event-triggering Mechanism for Multi-agent Systems [J]. Acta Armamentarii, 2025, 46(4): 240292-. |
| [15] | ZENG Zhaoyang, PENG Wensheng, LI Yunkai, XU Ming. Connotation,Development and Challenges of Reliability Technology of Intelligent UAV Swarm [J]. Acta Armamentarii, 2025, 46(3): 240322-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||