
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (S1): 250270-.doi: 10.12382/bgxb.2025.0270
Previous Articles Next Articles
CHEN Yijun, KONG Fancheng, LIU Yongji*( )
)
Received:2025-04-14
Online:2025-11-06
Contact:
LIU Yongji
CHEN Yijun, KONG Fancheng, LIU Yongji. Evaluation on Positioning Reliability and Sensitivity of the Ammunition Loading Manipulator’s Rotary Feeding Process based on Hybrid Importance Sampling Method[J]. Acta Armamentarii, 2025, 46(S1): 250270-.
Add to citation manager EndNote|Ris|BibTeX
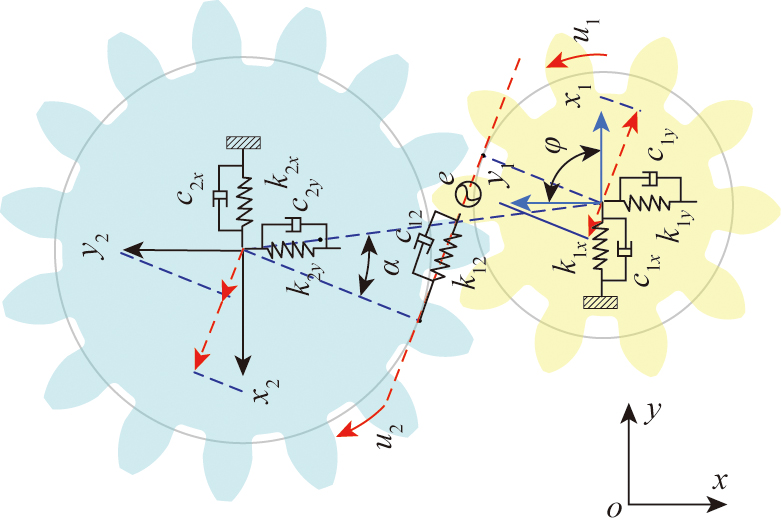
Fig.1 Gear mechanism dynamics model
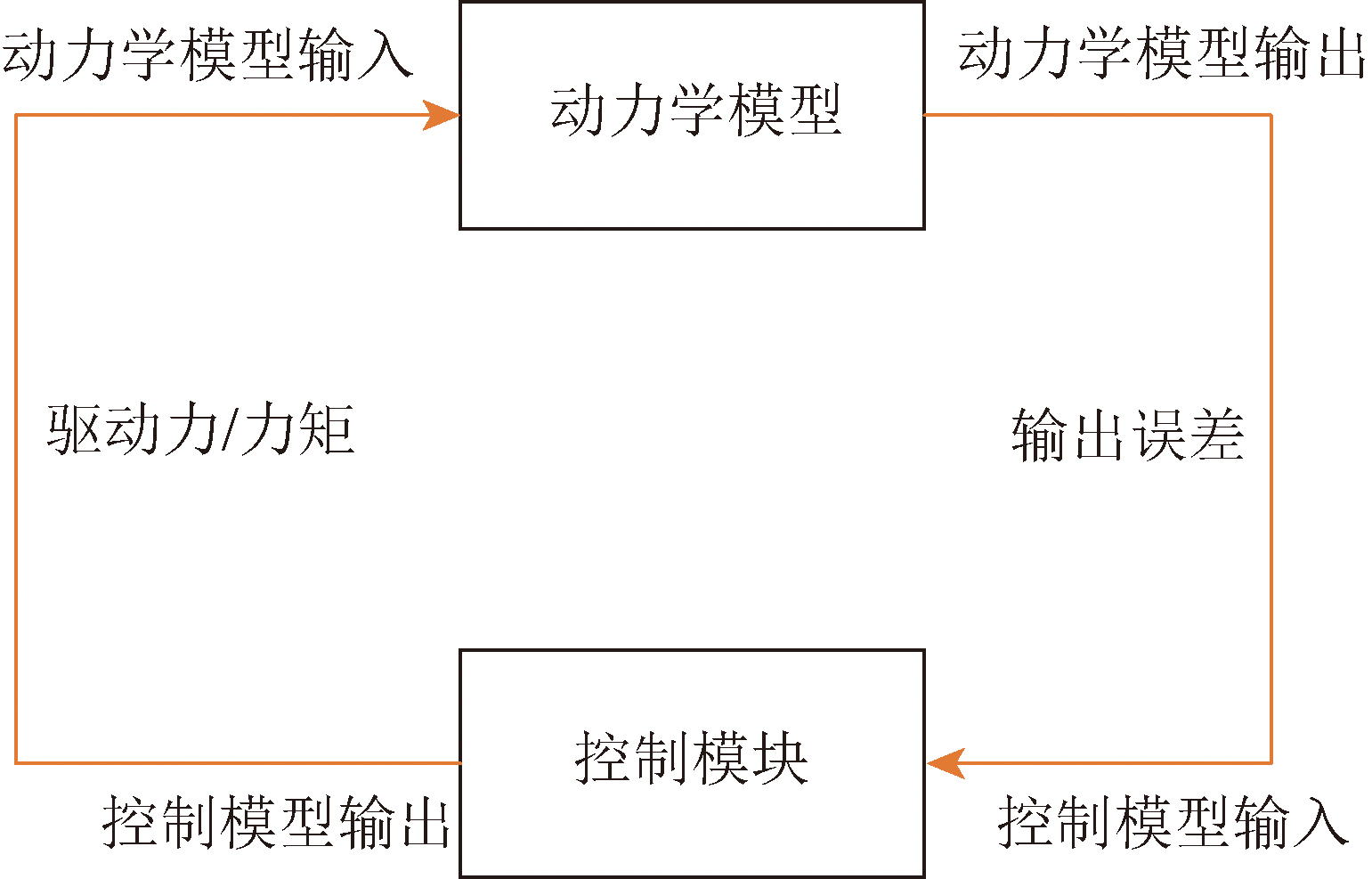
Fig.2 Schematic diagram of co-simulation data interaction
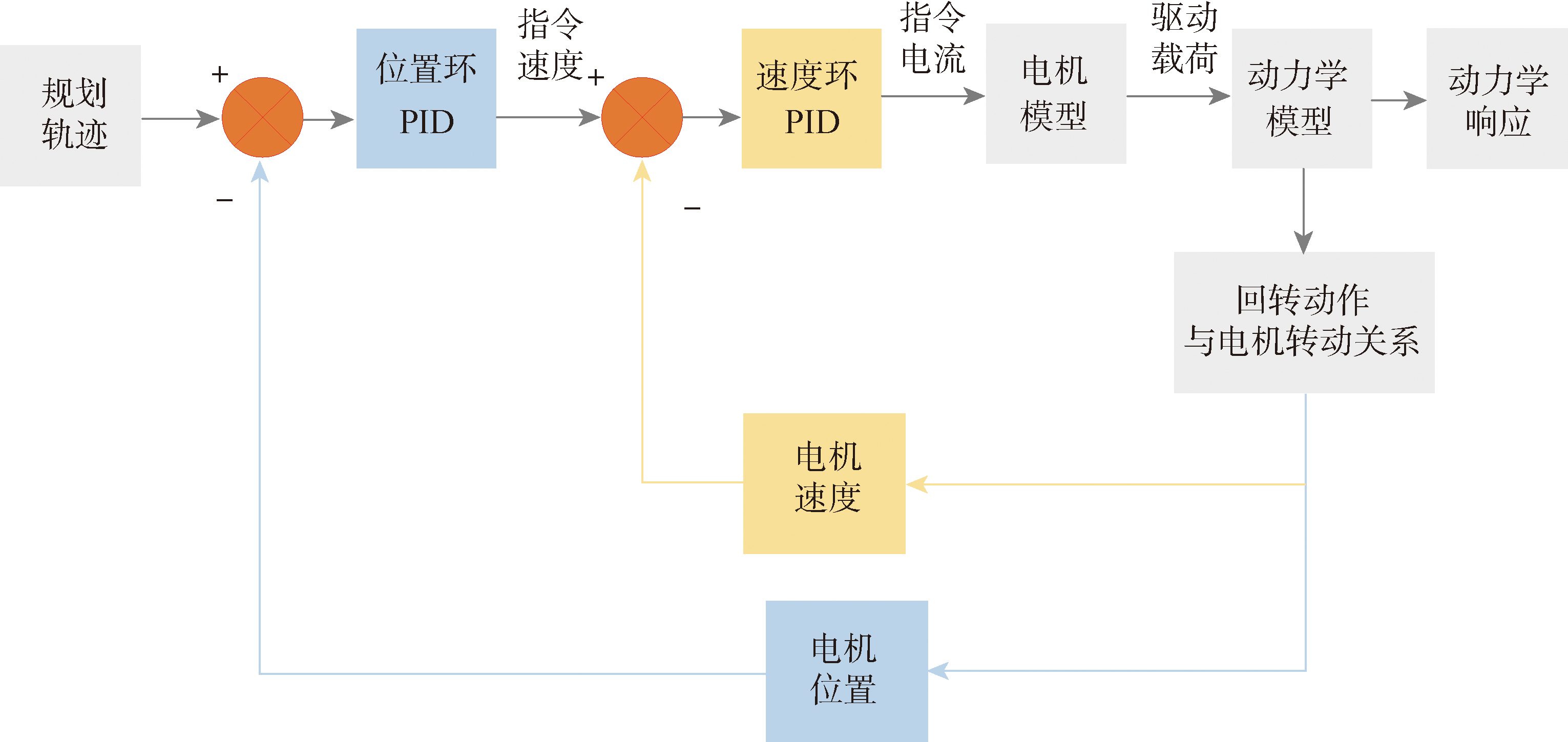
Fig.3 Co-simulation for the rotary feeding process of loading manipulator
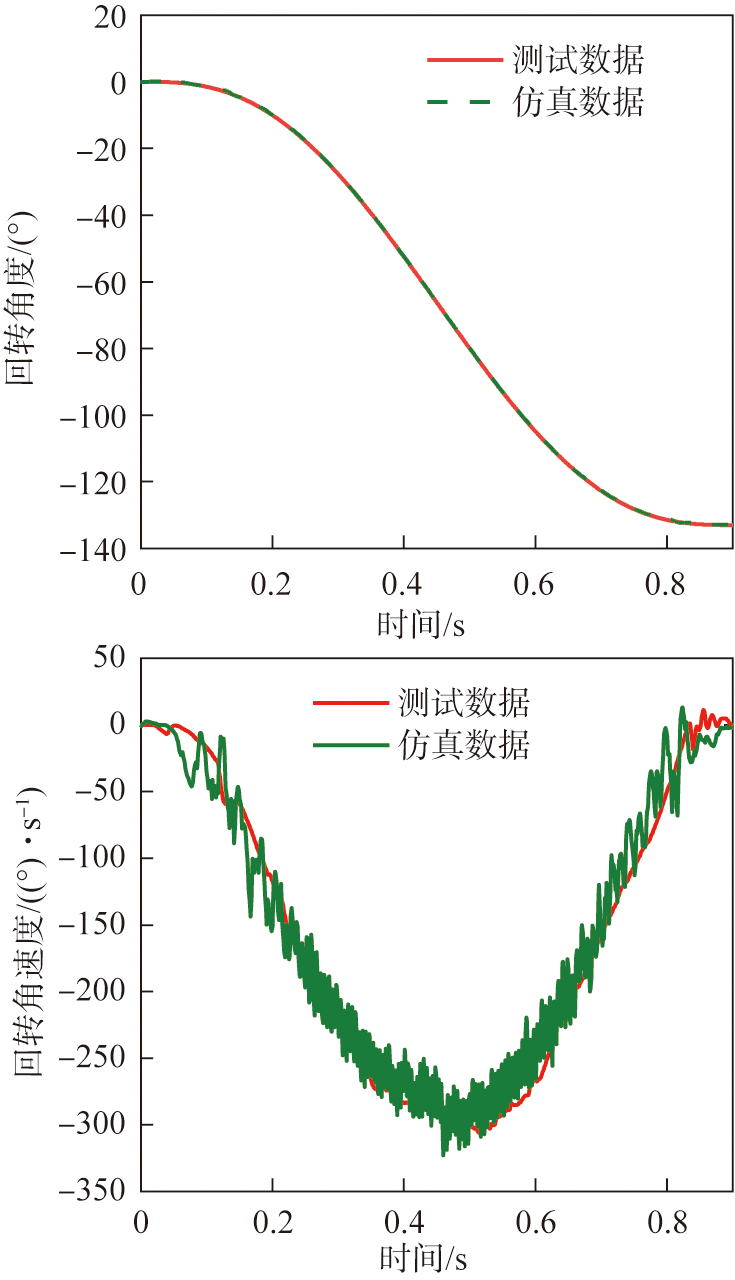
Fig.4 Rotation angle and angular velocity of manipulator
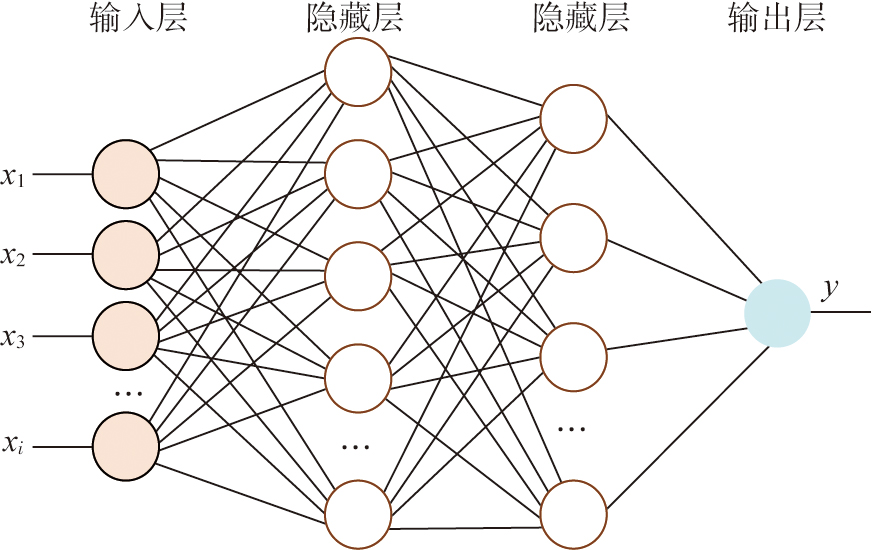
Fig.5 Schematic diagram of feedforward neural network
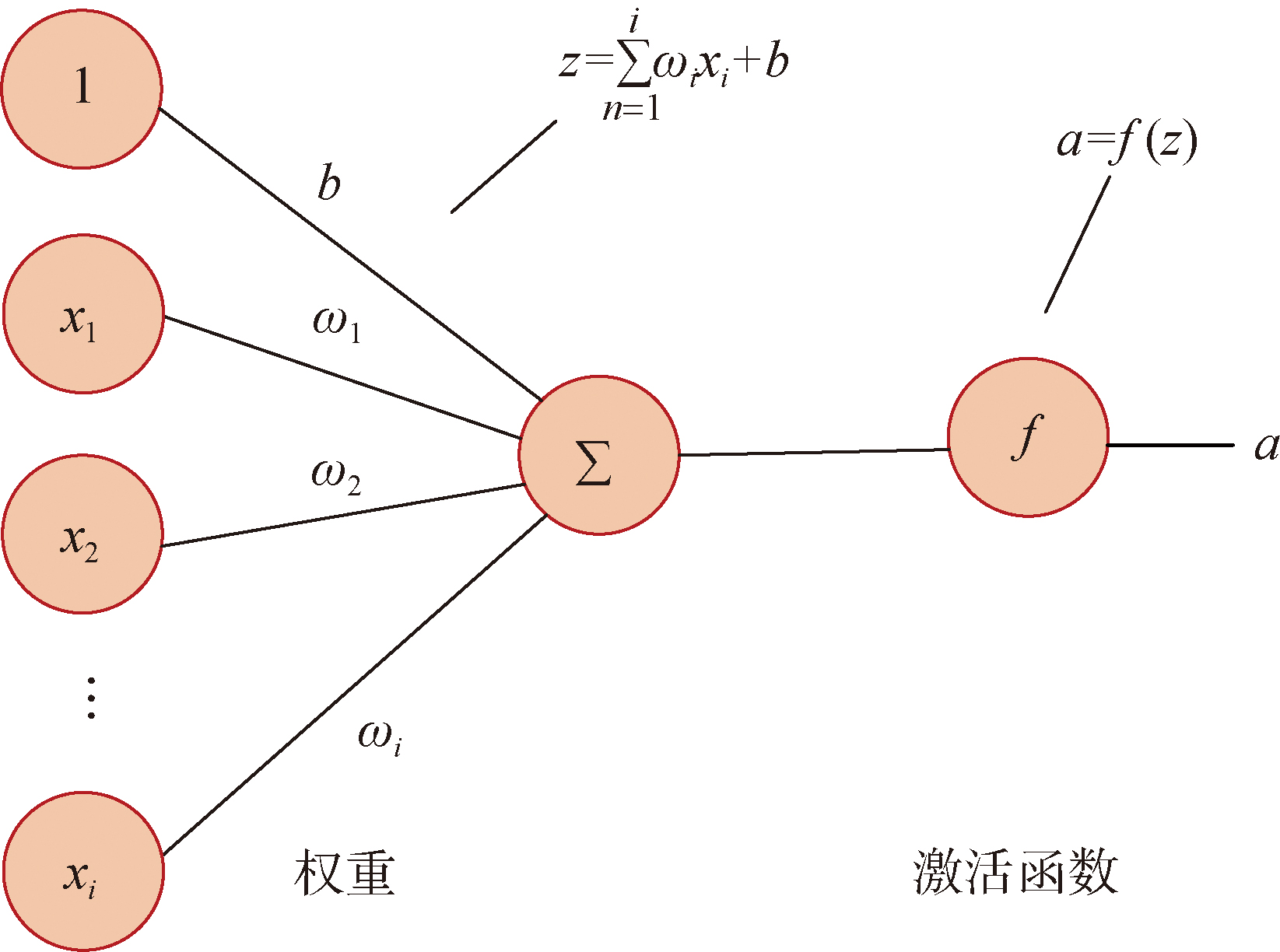
Fig.6 Structure of a single neuron
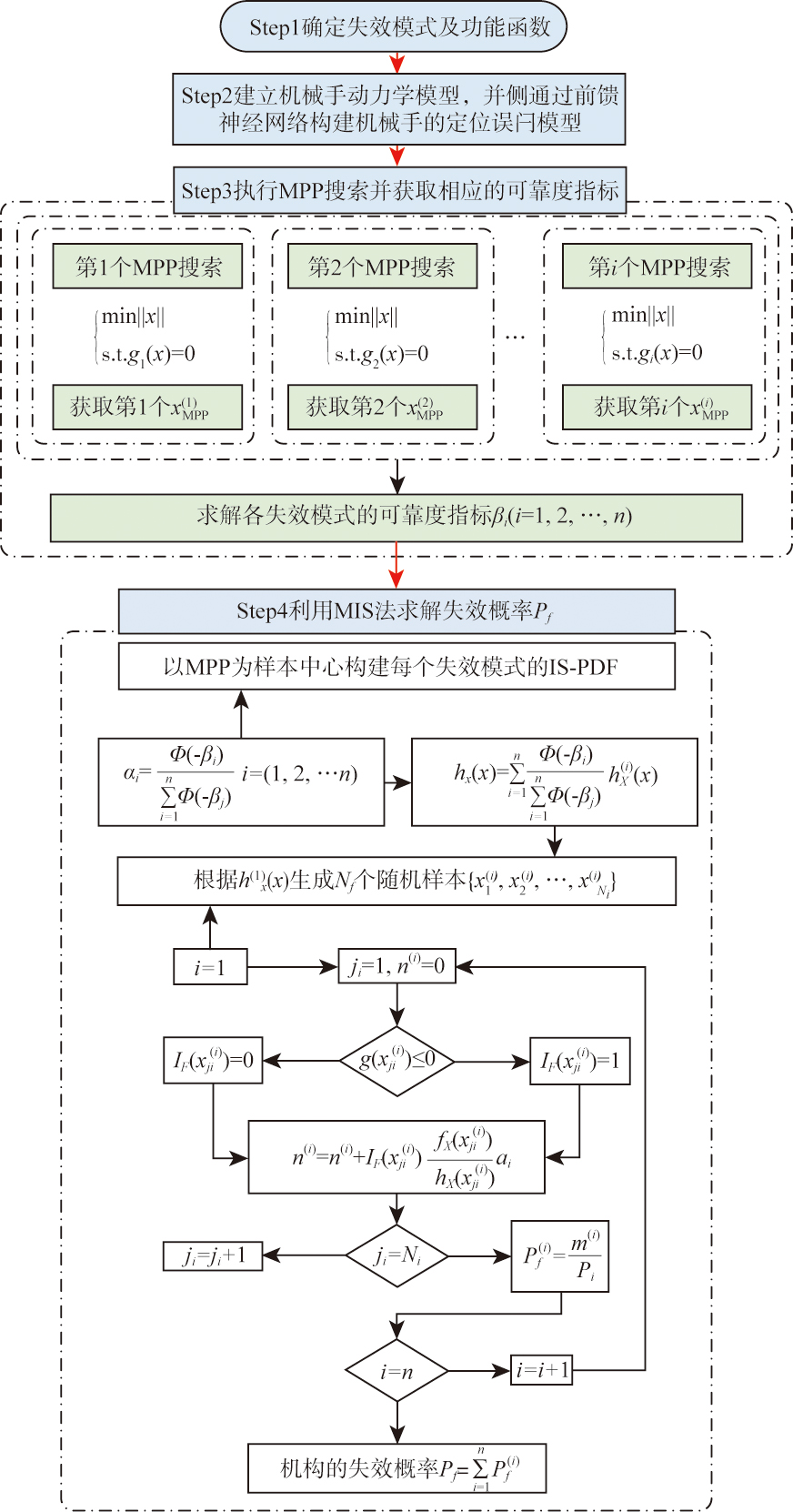
Fig.7 Flowchart of loading manipulator reliability solution
| 参数名称 | 参数符号 | 名义值 | 标准差 |
|---|---|---|---|
| 弹丸质量/kg | -6.58×10-8 | 45.5 | 0.2 |
| 弹丸转动惯量/(kg·m2·s) | -1.7×10-3 | 166502 | 1000 |
| 机械手质量/kg | -5.44×10-4 | 37.01 | 0.2 |
| 机械手转动惯量/(kg·m2·s) | Ij | 267380 | 2000 |
| 底盘质量/kg | 8.63×10-8 | 89.31 | 0.4 |
| 底盘转动惯量/(kg·m2·s) | -8.62×10-9 | 3170600 | 20000 |
| 齿轮接触刚度/(N·m-1) | -5.69×10-7 | 753353 | 1000 |
| 齿轮接触阻尼/(N·s·m-1) | -1.32×10-6 | 753.35 | 10 |
| 齿轮摩擦系数 | -3.00×10-4 | 0.2 | 0.02 |
| 齿轮间隙/mm | 1.97×10-5 | 0.1 | 0.02 |
| 机械手沿6.22×10-1轴初始位置/mm | 8.61×10-2 | 0 | 1 |
| 泊松比 | -2.75×10-2 | 0.3 | 0.009 |
Table 1 Uncertainty parameters and distribution types in the rotation process
| 参数名称 | 参数符号 | 名义值 | 标准差 |
|---|---|---|---|
| 弹丸质量/kg | -6.58×10-8 | 45.5 | 0.2 |
| 弹丸转动惯量/(kg·m2·s) | -1.7×10-3 | 166502 | 1000 |
| 机械手质量/kg | -5.44×10-4 | 37.01 | 0.2 |
| 机械手转动惯量/(kg·m2·s) | Ij | 267380 | 2000 |
| 底盘质量/kg | 8.63×10-8 | 89.31 | 0.4 |
| 底盘转动惯量/(kg·m2·s) | -8.62×10-9 | 3170600 | 20000 |
| 齿轮接触刚度/(N·m-1) | -5.69×10-7 | 753353 | 1000 |
| 齿轮接触阻尼/(N·s·m-1) | -1.32×10-6 | 753.35 | 10 |
| 齿轮摩擦系数 | -3.00×10-4 | 0.2 | 0.02 |
| 齿轮间隙/mm | 1.97×10-5 | 0.1 | 0.02 |
| 机械手沿6.22×10-1轴初始位置/mm | 8.61×10-2 | 0 | 1 |
| 泊松比 | -2.75×10-2 | 0.3 | 0.009 |
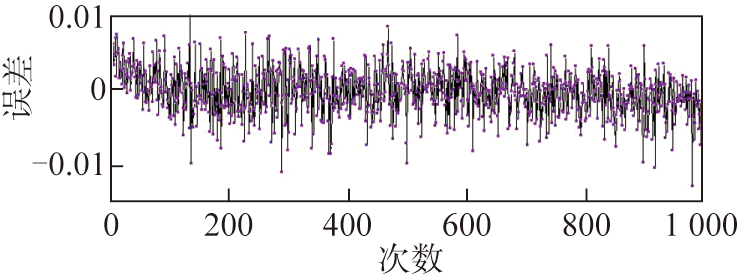
Fig.8 Prediction error of neural networks
| 均值灵敏度 | 数值 | 标准差灵敏度 | 数值 |
|---|---|---|---|
| 弹丸质量 | -8.1×10-4 | 弹丸质量 | 2.07×10-1 |
| 弹丸转动惯量 | -3.83×10-2 | 弹丸转动惯量 | -2.29×10-7 |
| 机械手质量 | 4.5×10-3 | 机械手质量 | 1.99×10-5 |
| 机械手转动惯量 | 6.56×10-7 | 机械手转动惯量 | -6.58×10-8 |
| 底盘质量 | -1.7×10-3 | 底盘质量 | -5.44×10-4 |
| 底盘转动惯量 | 8.63×10-8 | 底盘转动惯量 | -8.62×10-9 |
| 齿轮接触刚度 | -5.69×10-7 | 齿轮接触刚度 | -1.32×10-6 |
| 齿轮接触阻尼 | -3.00×10-4 | 齿轮接触阻尼 | 1.97×10-5 |
| 齿轮摩擦系数 | 1.20 | 齿轮摩擦系数 | 6.22×10-1 |
| 齿轮间隙 | 8.61×10-2 | 齿轮间隙 | -2.75×10-2 |
| 机械手沿y轴初始位置 | 5.51×10-4 | 机械手沿y轴初始位置 | -8.1×10-4 |
| 泊松比 | 2.07×10-1 | 泊松比 | -3.83×10-2 |
Table 2 Sensitivity analysis results of parameters in the recurrent process
| 均值灵敏度 | 数值 | 标准差灵敏度 | 数值 |
|---|---|---|---|
| 弹丸质量 | -8.1×10-4 | 弹丸质量 | 2.07×10-1 |
| 弹丸转动惯量 | -3.83×10-2 | 弹丸转动惯量 | -2.29×10-7 |
| 机械手质量 | 4.5×10-3 | 机械手质量 | 1.99×10-5 |
| 机械手转动惯量 | 6.56×10-7 | 机械手转动惯量 | -6.58×10-8 |
| 底盘质量 | -1.7×10-3 | 底盘质量 | -5.44×10-4 |
| 底盘转动惯量 | 8.63×10-8 | 底盘转动惯量 | -8.62×10-9 |
| 齿轮接触刚度 | -5.69×10-7 | 齿轮接触刚度 | -1.32×10-6 |
| 齿轮接触阻尼 | -3.00×10-4 | 齿轮接触阻尼 | 1.97×10-5 |
| 齿轮摩擦系数 | 1.20 | 齿轮摩擦系数 | 6.22×10-1 |
| 齿轮间隙 | 8.61×10-2 | 齿轮间隙 | -2.75×10-2 |
| 机械手沿y轴初始位置 | 5.51×10-4 | 机械手沿y轴初始位置 | -8.1×10-4 |
| 泊松比 | 2.07×10-1 | 泊松比 | -3.83×10-2 |
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [1] | ZHU Zejun, WANG Wei, LIN Shiyao, JI Yi. Adaptive Neural Network Output Feedback Control Method for Electromechanical Actuator with Backlash and Saturation [J]. Acta Armamentarii, 2025, 46(S1): 250398-. |
| [2] | WANG Wei, LIU Jiaqi, LIN Shiyao, ZHU Zejun, JI Yi. Adaptive Neural Network-based Flight Vehicle Attitude Controller with Prescribed Performance Constraint [J]. Acta Armamentarii, 2025, 46(S1): 250401-. |
| [3] | CHEN Changfa, WU Jun’an, GUO Rui, CUI Hao, YAN Shuaiyin, ZHOU Hao. Thickness Equivalence Model Based on Serial Neural Network for Explosion Resistance of Radome [J]. Acta Armamentarii, 2025, 46(9): 241001-. |
| [4] | HUANG Peiji, PENG Weiwen, LENG Chunjiang, ZHANG Qing, ZHONG Wei. Rapid Prediction of Blast Loading in Dense Urban Building Complex Based on Neural Networks [J]. Acta Armamentarii, 2025, 46(8): 240987-. |
| [5] | WANG Yang, FENG Yongxin, QIAN Bo, SONG Bixue. Kurtosis-based Spectrum Sensing Method for Wireless Signals [J]. Acta Armamentarii, 2025, 46(7): 240441-. |
| [6] | QIN Taotao, JI Siyuan, LEI Lin, ZHENG Zhanfeng. Non-parametric Modelling and Muzzle Velocity Prediction of Multi-stage Induction Coilgun based on PSO-RNN Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240616-. |
| [7] | GONG Shilong, DANG Jianjun, LI Shaoxing, HUANG Chuang. Optimization Design Method of the Supercavitating Projectile Based on BP Neural Network [J]. Acta Armamentarii, 2025, 46(5): 240496-. |
| [8] | LIU Xinhao, CHEN Bin, YING Wenjian, LI Peitao, WU Shiqian. Multi-scale Feature Interactive Image Dehazing Algorithm Based on Hybrid Architecture [J]. Acta Armamentarii, 2025, 46(5): 240861-. |
| [9] | HAN Zhengda, WU Yunhao, ZHANG Wei, LIU Yi, LIU Jingang, ZHU Weiguo. Research on Electromechanical Coupling Dynamic Characteristics and Control of High-power Diesel Generator Set for Vehicle [J]. Acta Armamentarii, 2025, 46(4): 240397-. |
| [10] | NING Jianguo, WANG Qi, LI Jianqiao. ANN-based Prediction Model for the Initial Velocity of Fragments in a Triangular Prism Directional Charge Structure [J]. Acta Armamentarii, 2025, 46(3): 240346-. |
| [11] | WANG Yimin, YUAN Shusen, LIN Darui, YANG Guolai. Nonlinear Sliding Mode Control Based on Neural Network Compensation for Tank All-electric Bidirectional Stabilizers [J]. Acta Armamentarii, 2025, 46(3): 240421-. |
| [12] | LI Yingshun, YU Ang, LI Mao, HE Zhe, LIU Shiming. Fault Diagnosis of Armored Vehicle Engine Based on KLDA-IDBO-BP [J]. Acta Armamentarii, 2025, 46(3): 240083-. |
| [13] | SU Zhengyu, YANG Baosheng, YANG Jing, TANG Jingnan, JIANG Yi, DENG Yueguang. A CNN-SVM-based Adapter Drop Point Prediction Algorithm [J]. Acta Armamentarii, 2025, 46(2): 240016-. |
| [14] | XIE Yunkun, LIU Hui, GAO Pu, WU Yunhao, LI Xinyi, ZHOU Ruyi. Study on Inherent Vibration Characteristics and Resonance Speed of High-speed Electromechanical Transmission System for Vehicle [J]. Acta Armamentarii, 2025, 46(1): 231149-. |
| [15] | LIU Kunlong, WANG Hu, LIU Xiaoqiang, NIU Shuaixu, HUANG Yi, FU Qi, ZHAO Tao. Illumination Perception and Feature Enhancement Network for RGB-T Semantic Segmentation [J]. Acta Armamentarii, 2024, 45(S1): 219-230. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||