
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (S1): 250229-.doi: 10.12382/bgxb.2025.0229
Previous Articles Next Articles
ZHANG Tian1,*( ), HU Yunqi1, CHEN Zhaowen1, WANG Qiang1, YANG Zhilai1, GUO Meng2
), HU Yunqi1, CHEN Zhaowen1, WANG Qiang1, YANG Zhilai1, GUO Meng2
Received:2025-04-01
Online:2025-11-06
Contact:
ZHANG Tian
ZHANG Tian, HU Yunqi, CHEN Zhaowen, WANG Qiang, YANG Zhilai, GUO Meng. Coverage Path Planning Technology for UAV in Complex Planar Regions[J]. Acta Armamentarii, 2025, 46(S1): 250229-.
Add to citation manager EndNote|Ris|BibTeX
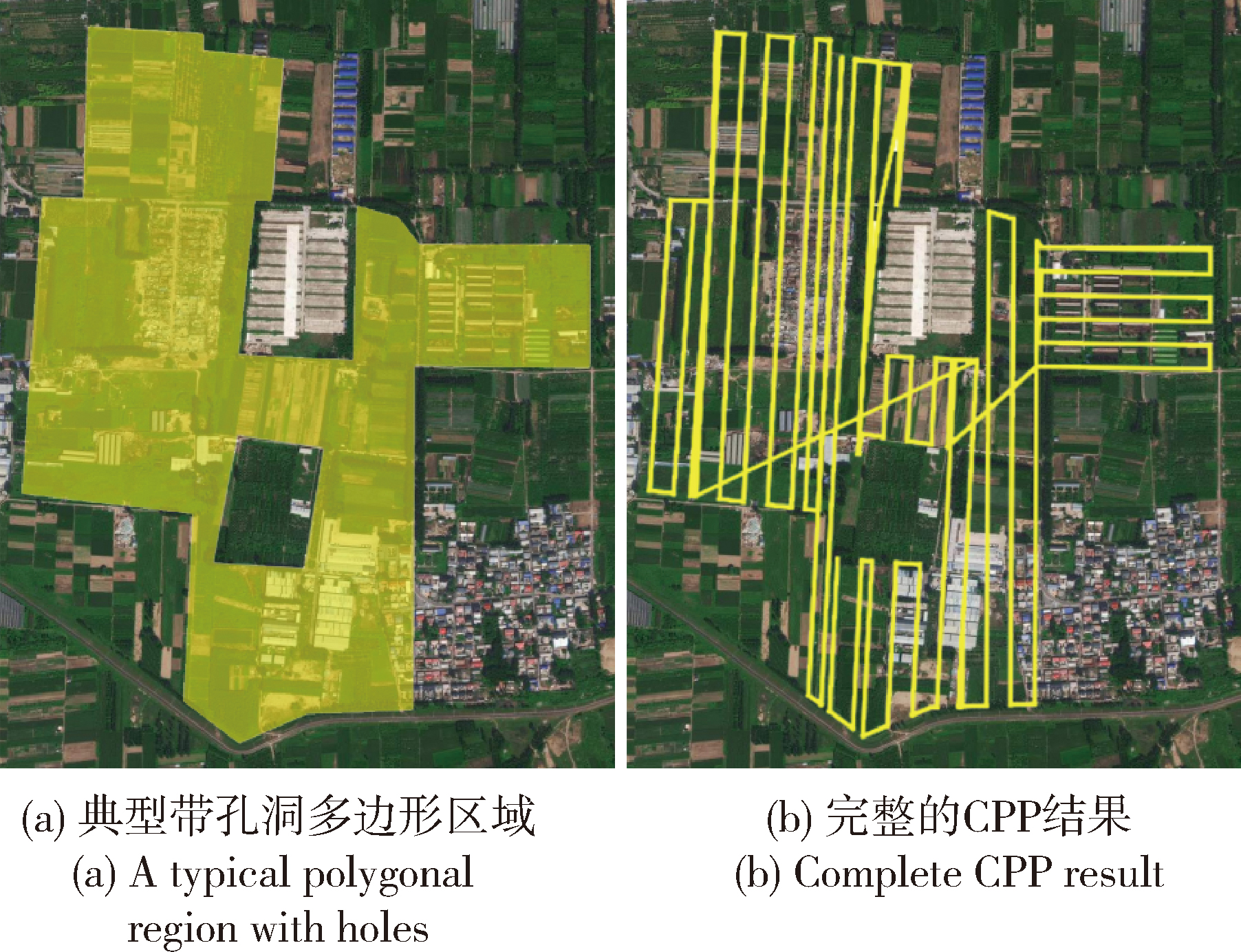
Fig.1 CPP task in a complex region
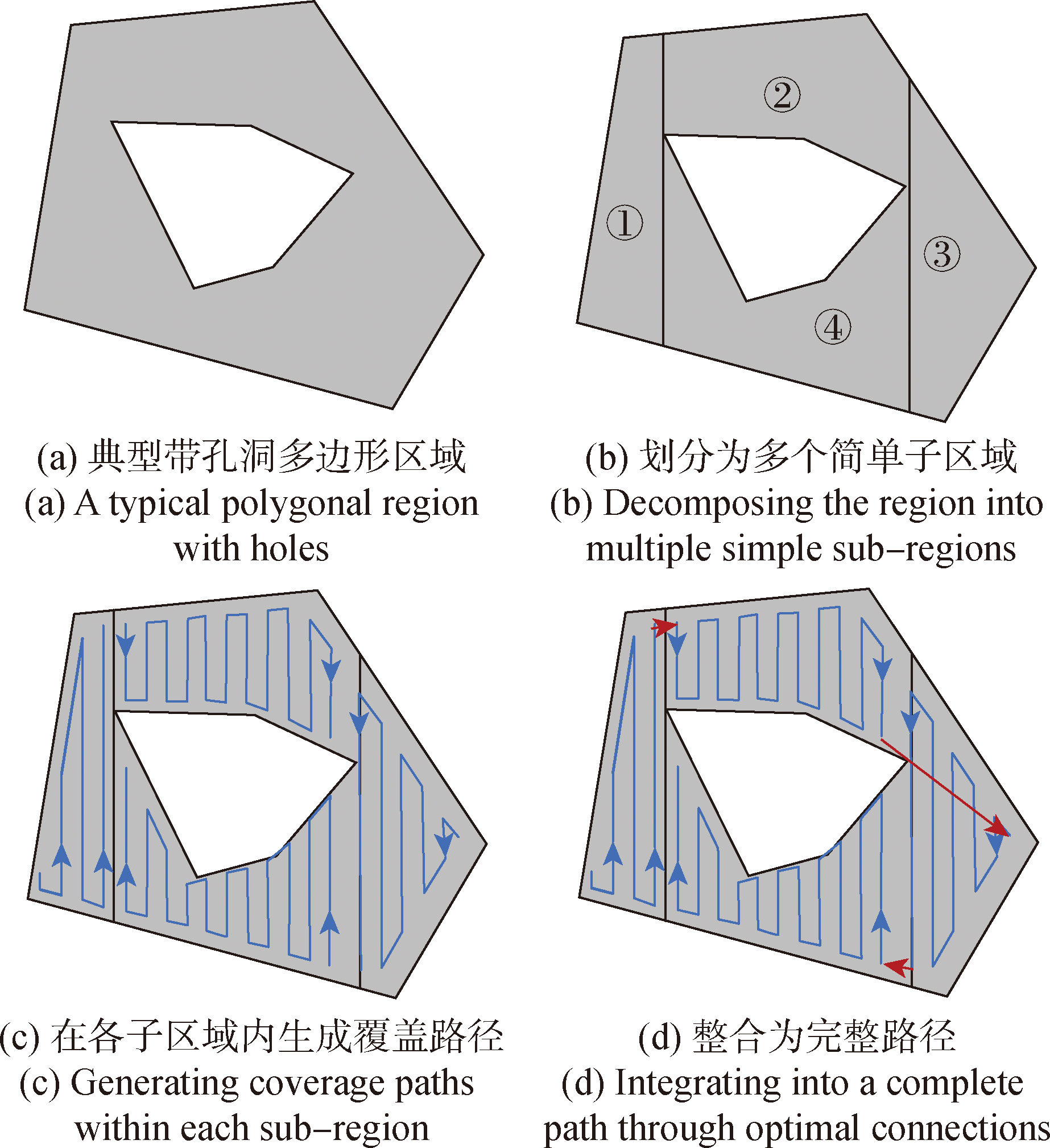
Fig.2 Flowchart of region decomposition and coverage path planning
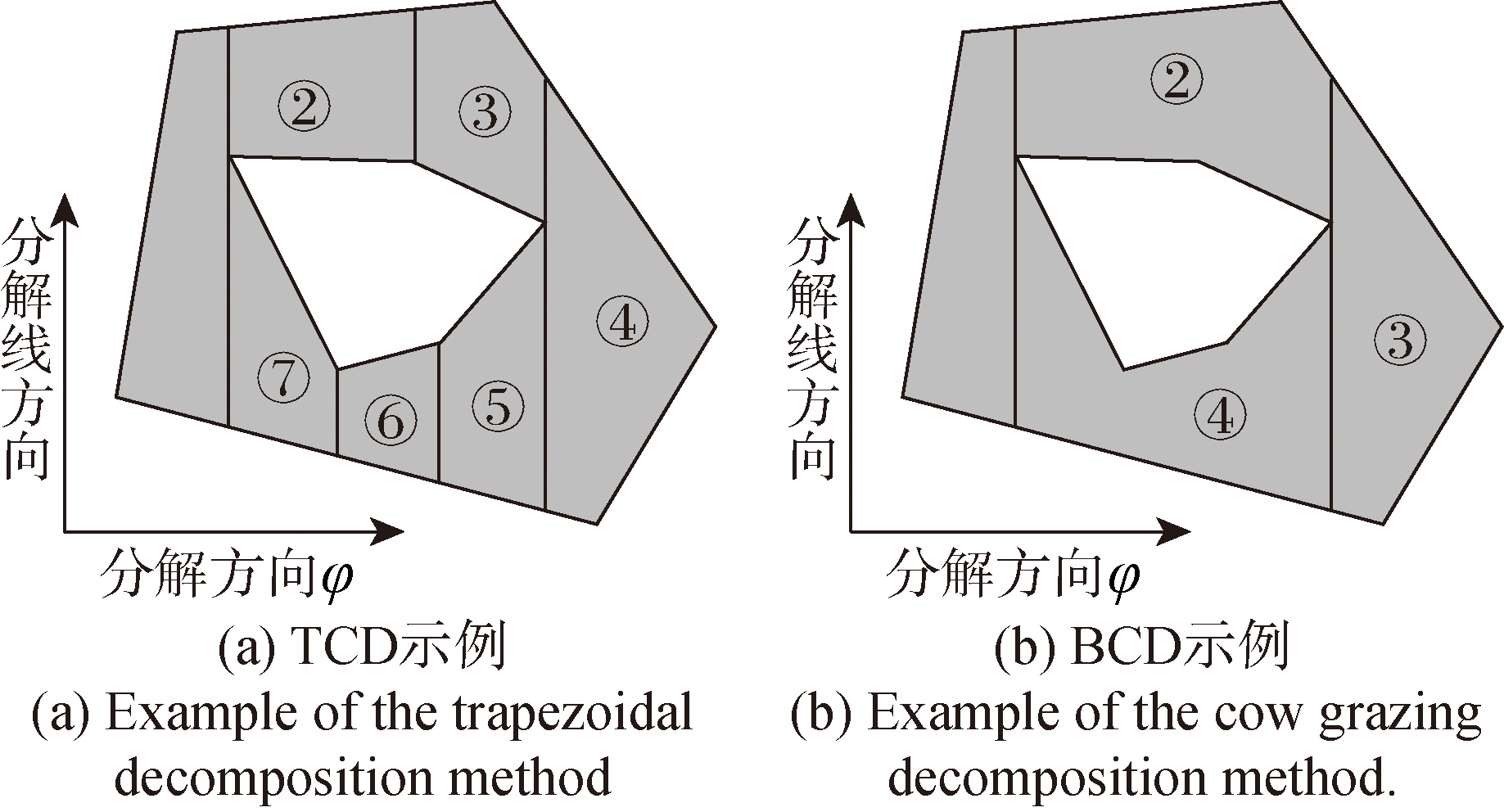
Fig.3 TCD and BCD Domain Decomposition Example
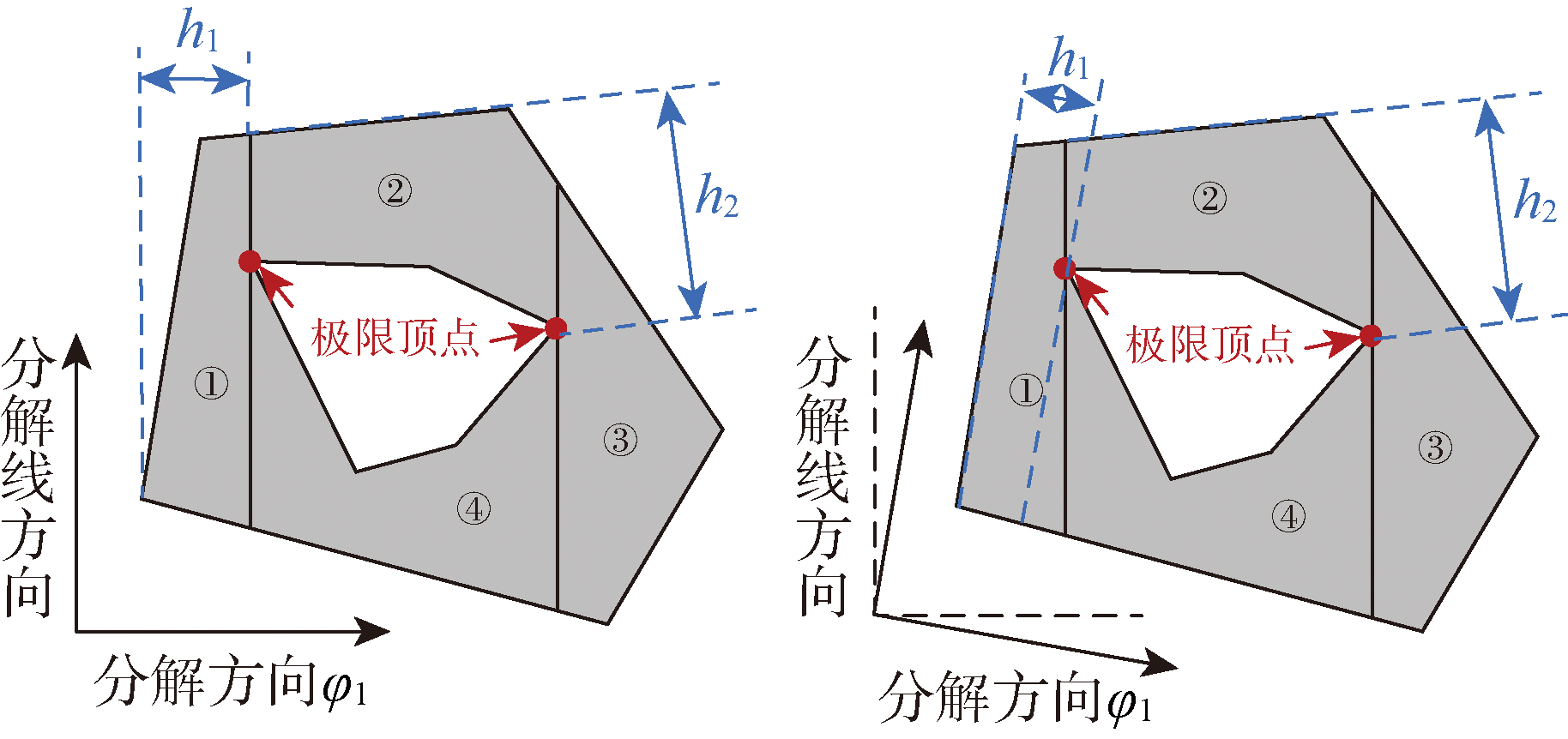
Fig.4 Example of the BCD
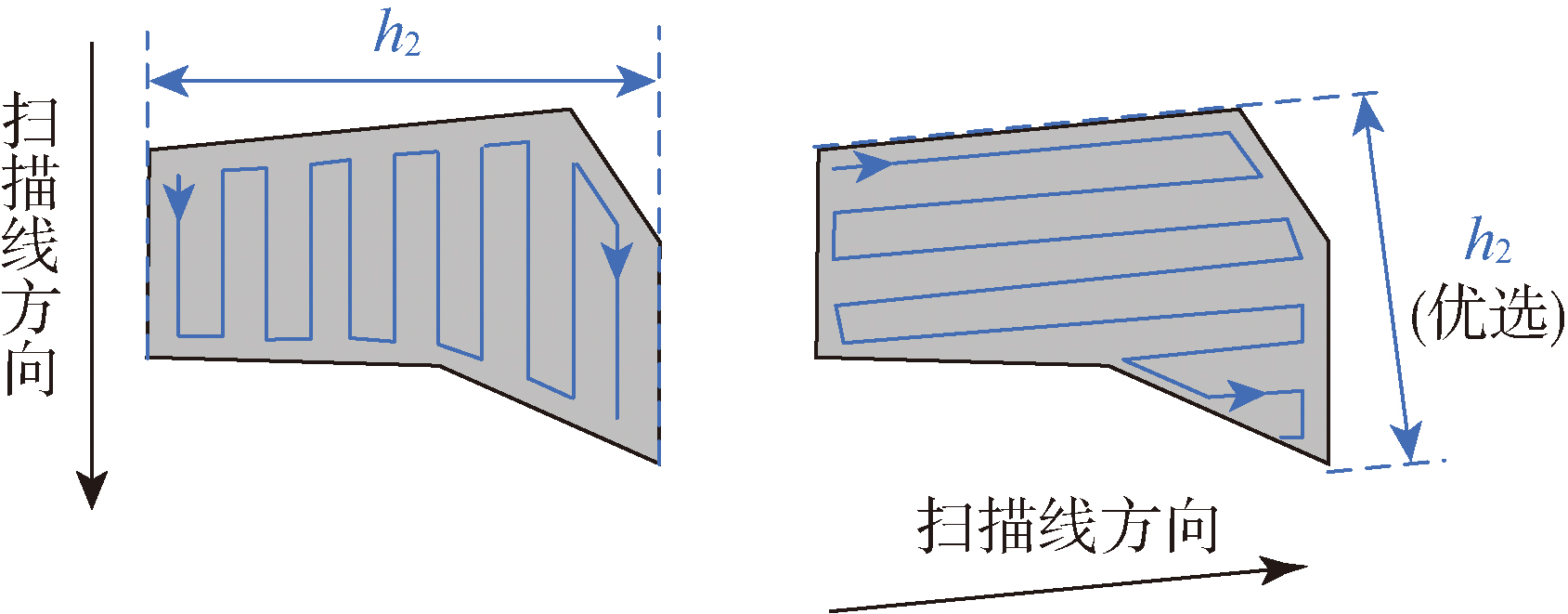
Fig.5 Cell heights of sub-regions in different scanning line directions
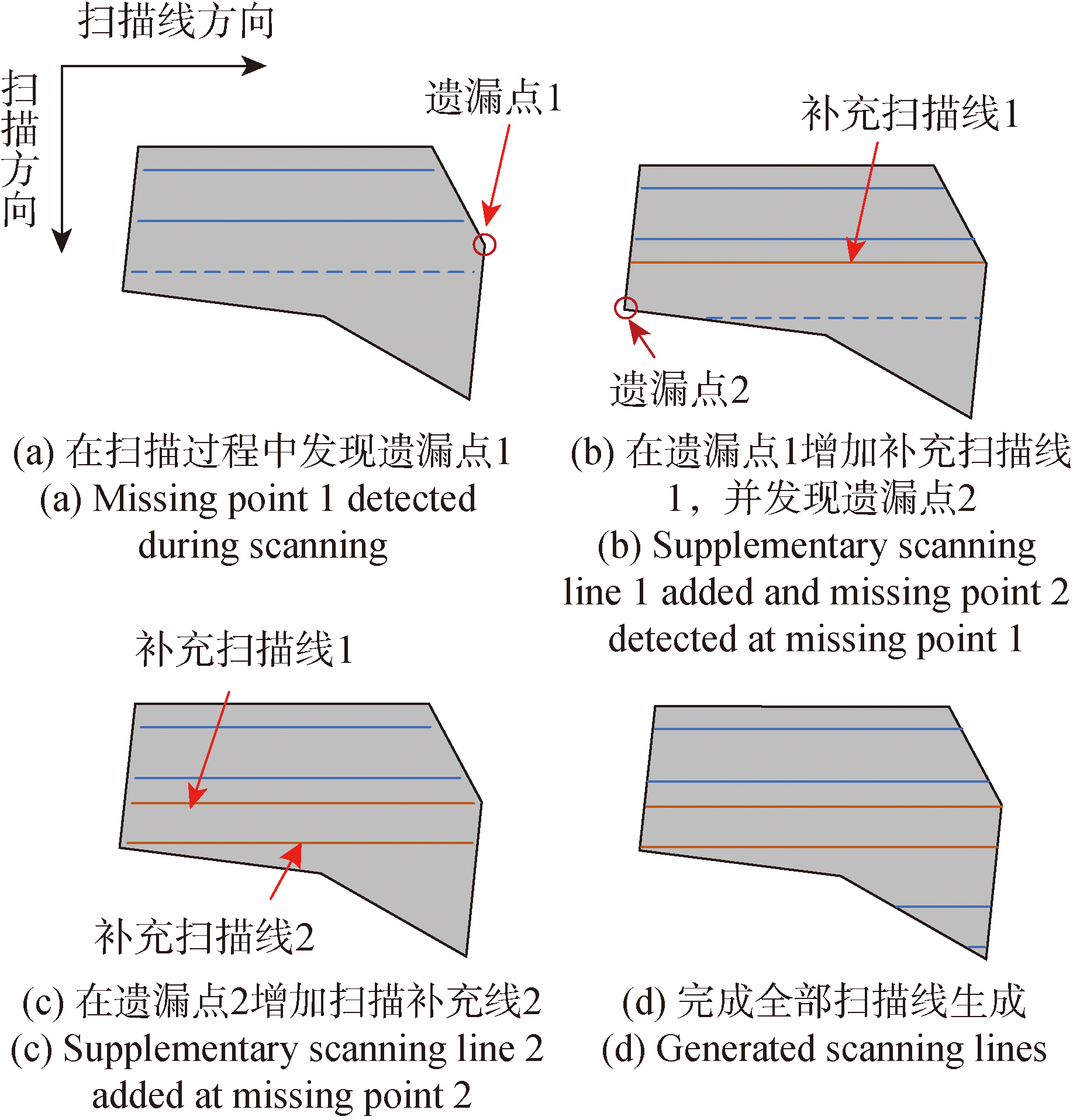
Fig.6 Example of supplementary scanning lines during coverage path
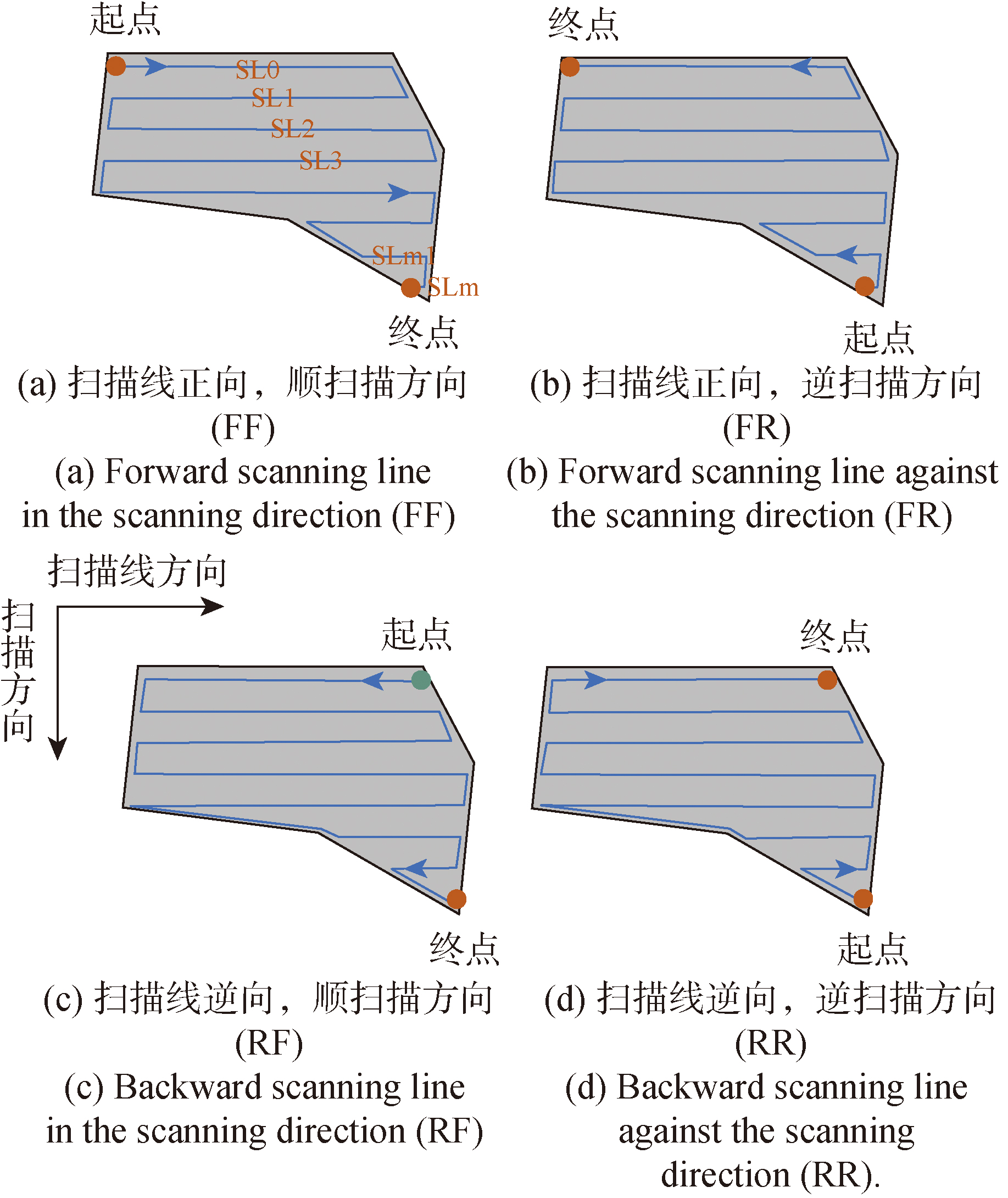
Fig.7 Four types of coverage path forms generated in the same scanning line direction
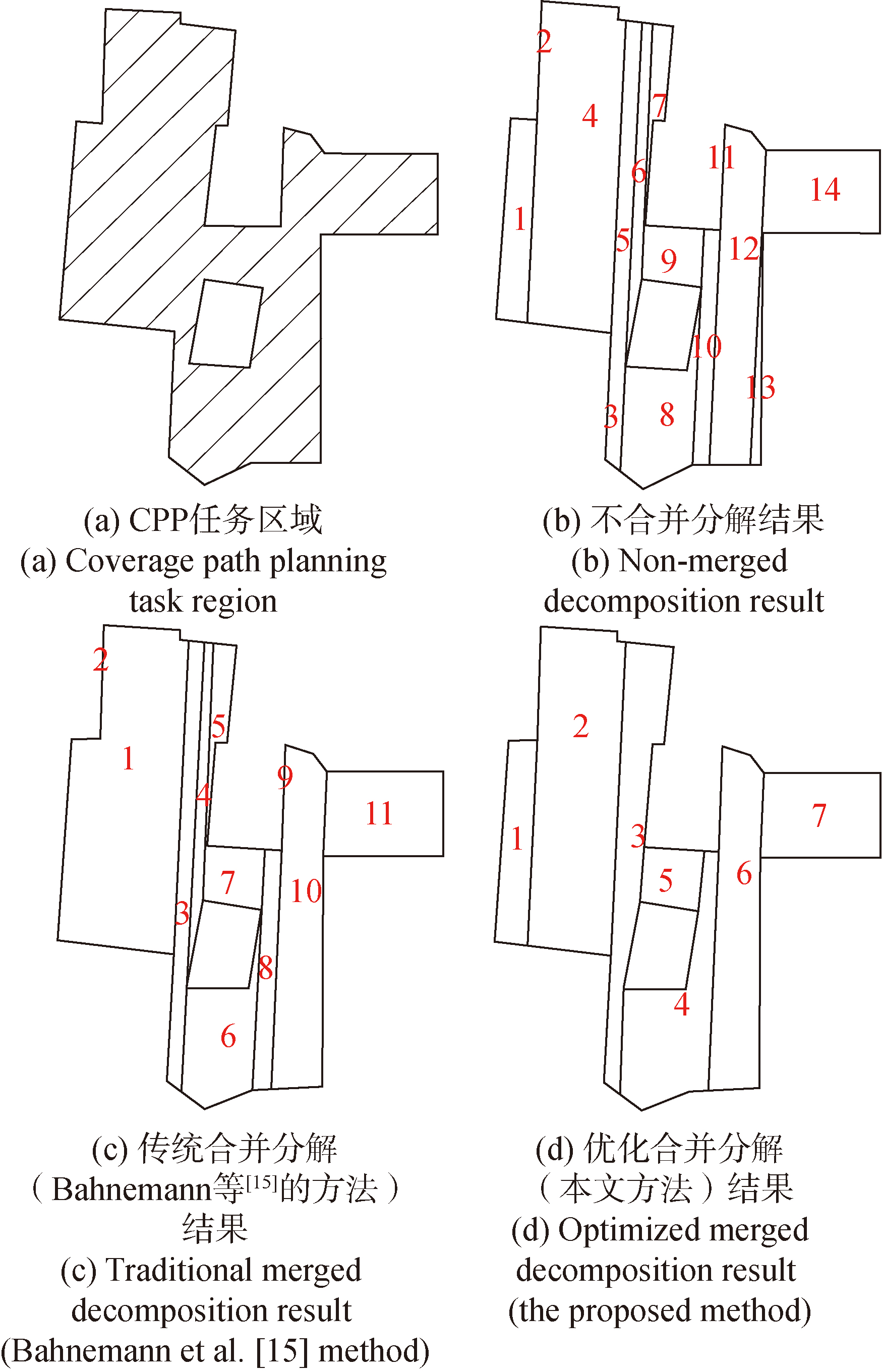
Fig.8 Domain decomposition optimization schematic diagram

Fig.9 Coverage path planning results formed after BCD decomposition under different strategies

Fig.10 Coverage path planning results before and after optimization
| 场景 | 任务区域 | 传统算法 | 本文算法 |
|---|---|---|---|
| 城镇 | | | |
| 机场 | | | |
| 山区 | | | |
| 城市 | | | |
| 林地 | | | |
Table 1 The task regions for five coverage path planning tasks and the planning results of the method by Bahnemann et al.[15] (traditional method),and the proposed method
| 场景 | 任务区域 | 传统算法 | 本文算法 |
|---|---|---|---|
| 城镇 | | | |
| 机场 | | | |
| 山区 | | | |
| 城市 | | | |
| 林地 | | | |
| 场景 | 参数 | 传统算法 | 本文算法 | 相比减少 |
|---|---|---|---|---|
| 城镇 | 航点数量 | 72 | 62 | 13.89% |
| 规划距离/m | 18757 | 16299 | 13.10% | |
| 预估时间/s | 3239 | 2813 | 13.15% | |
| 机场 | 航点数量 | 48 | 36 | 25.00% |
| 规划距离/m | 8146 | 4786 | 41.25% | |
| 预估时间/s | 1433 | 854 | 40.40% | |
| 山区 | 航点数量 | 103 | 78 | 24.27% |
| 规划距离/m | 22202 | 14985 | 32.51% | |
| 预估时间/s | 3862 | 2620 | 32.16% | |
| 城市 | 航点数量 | 113 | 91 | 19.47% |
| 规划距离/m | 36236 | 25763 | 28.90% | |
| 预估时间/s | 6217 | 4437 | 28.63% | |
| 林地 | 航点数量 | 155 | 72 | 53.55% |
| 规划距离/m | 30098 | 25624 | 14.86% | |
| 预估时间/s | 5260 | 4384 | 16.65% |
Table 2 Comparison of estimated task completion times under different scenarios
| 场景 | 参数 | 传统算法 | 本文算法 | 相比减少 |
|---|---|---|---|---|
| 城镇 | 航点数量 | 72 | 62 | 13.89% |
| 规划距离/m | 18757 | 16299 | 13.10% | |
| 预估时间/s | 3239 | 2813 | 13.15% | |
| 机场 | 航点数量 | 48 | 36 | 25.00% |
| 规划距离/m | 8146 | 4786 | 41.25% | |
| 预估时间/s | 1433 | 854 | 40.40% | |
| 山区 | 航点数量 | 103 | 78 | 24.27% |
| 规划距离/m | 22202 | 14985 | 32.51% | |
| 预估时间/s | 3862 | 2620 | 32.16% | |
| 城市 | 航点数量 | 113 | 91 | 19.47% |
| 规划距离/m | 36236 | 25763 | 28.90% | |
| 预估时间/s | 6217 | 4437 | 28.63% | |
| 林地 | 航点数量 | 155 | 72 | 53.55% |
| 规划距离/m | 30098 | 25624 | 14.86% | |
| 预估时间/s | 5260 | 4384 | 16.65% |
| [1] |
|
| [2] |
|
| [3] |
doi: 10.1002/rob.21887 |
| [4] |
|
| [5] |
张世勇, 张雪波, 苑晶, 等. 旋翼无人机环境覆盖与探索规划方法综述[J]. 控制与决策, 2022, 37(3):513-529.
|
|
|
|
| [6] |
doi: 10.3390/s151127783 pmid: 26540055 |
| [7] |
陈洋, 周锐. 通信受限条件下多无人机协同环境覆盖路径规划[J]. 中国惯性技术学报, 2024, 32(3):273-281.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [1] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [2] | WANG Yitao, WANG Junsen, SHI Zhangsong, XU Huihui, ZHU Weiming. Task Allocation for Multi-agent System Based on Extended Rapidly-exploring Random Tree and Contract Net [J]. Acta Armamentarii, 2025, 46(5): 240743-. |
| [3] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [4] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [5] | LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network [J]. Acta Armamentarii, 2025, 46(2): 240265-. |
| [6] | HU Mingzhe, LI Xuguang, REN Zhiying, ZENG Shuai. UAV 3D Path Planning Based on A* Algorithm with Improved Heuristic Function [J]. Acta Armamentarii, 2024, 45(S1): 302-307. |
| [7] | NIU Yilong, YANG Yi, ZHANG Kai, MU Ying, WANG Qi, WANG Yingmin. Path Planning Method for Unmanned Surface Vessel in On-call Submarine Search Based on Improved DQN Algorithm [J]. Acta Armamentarii, 2024, 45(9): 3204-3215. |
| [8] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [9] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [10] | WANG Xiaolong, CHEN Yang, HU Mian, LI Xudong. Robot Path Planning for Persistent Monitoring Based on Improved Deep Q Networks [J]. Acta Armamentarii, 2024, 45(6): 1813-1823. |
| [11] | PAN Zuodong, ZHOU Yue, GUO Wei, XU Gaofei, SUN Yu. Path Planning of Tidal Flat Tracked Vehicle Based on CB-RRT* Algorithm [J]. Acta Armamentarii, 2024, 45(4): 1117-1128. |
| [12] | SUN Pengyao, HUANG Yanyan, WANG Kaisheng. Two-dimensional Global Path Planning Based on Potential Field Enhanced Fireworks Algorithm [J]. Acta Armamentarii, 2024, 45(10): 3499-3518. |
| [13] | LU Ying, PANG Lichen, CHEN Yusi, SONG Wanying, FU Yanfang. A Swarm Intelligence Algorithm for UAV Path Planning in Urban Warfare [J]. Acta Armamentarii, 2023, 44(S2): 146-156. |
| [14] | LI Song, MA Zhuangzhuang, ZHANG Yunlin, SHAO Jinliang. Multi-agent Coverage Path Planning Based on Security Reinforcement Learning [J]. Acta Armamentarii, 2023, 44(S2): 101-113. |
| [15] | YIN Yiyi, WANG Xiaofang, ZHOU Jian. Q-Learning-based Multi-UAV Cooperative Path Planning Method [J]. Acta Armamentarii, 2023, 44(2): 484-495. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||