
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250327-.doi: 10.12382/bgxb.2025.0327
YANG Haiyang, WU Jiajun, LIU Hui*( ), HAN Lijin, NIE Shida, XIANG Changle
), HAN Lijin, NIE Shida, XIANG Changle
Received:2025-04-29
Online:2025-11-27
Contact:
LIU Hui
CLC Number:
YANG Haiyang, WU Jiajun, LIU Hui, HAN Lijin, NIE Shida, XIANG Changle. Integrated Adaptive Compliance Control for Wheeled-legged Platforms Based on State Estimation[J]. Acta Armamentarii, 2025, 46(11): 250327-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Wheeled-legged platform and modular two-stage actuation unit
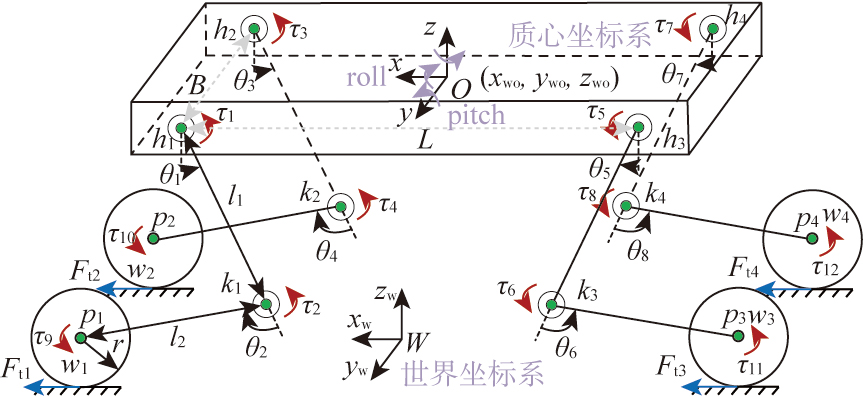
Fig.2 Coordinate system and related variable definitions in platform kinematics model
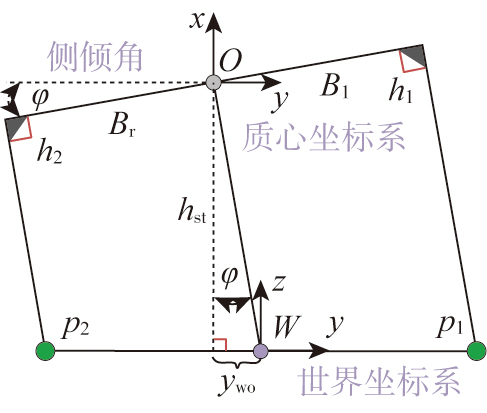
Fig.3 Roll kinematics in platform

Fig.4 Dynamic model of two-stage actuation unit
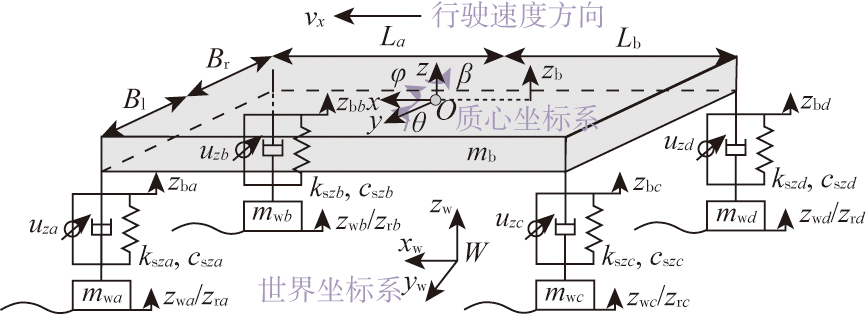
Fig.5 Dynamic model for vertical vibration control
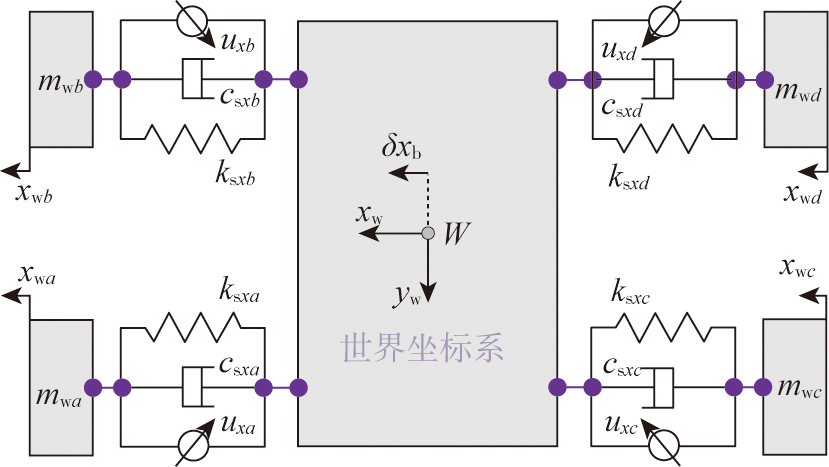
Fig.6 Dynamic model for longitudinal compliance control

Fig.7 Adaptive integrated compliance control framework in vertical-longitudinal directions of wheel-legged platforms
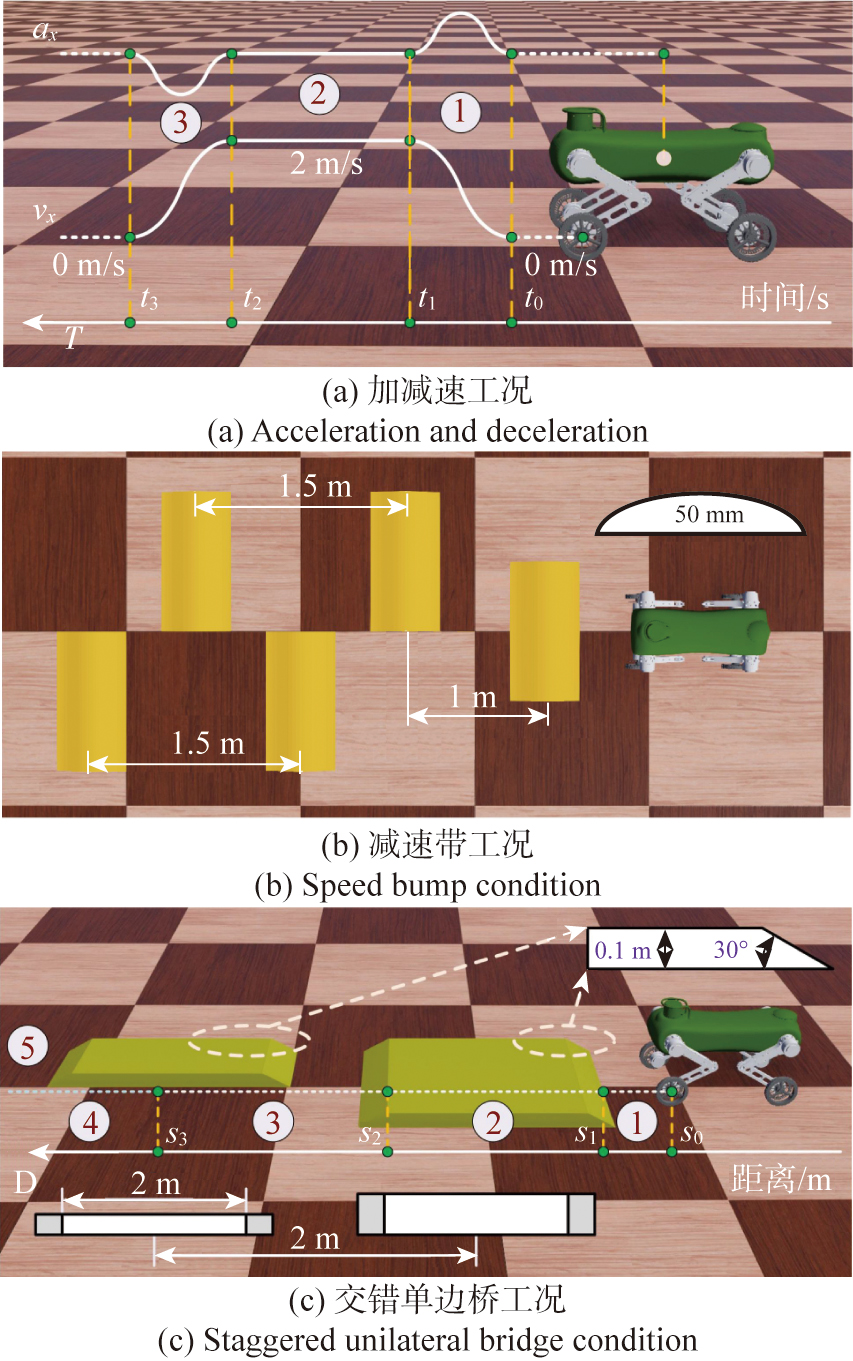
Fig.8 Simulation conditions on the proposed IACC method
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| mb/kg | 48 | ksxi/(N·m-1) | 5000 |
| mwi/kg | 3 | csxi/(N·s·m-1) | 150 |
| l1/m | 0.3 | kszi/(N·m-1) | 6000 |
| l2/m | 0.3 | cszi/(N·s·m-1) | 200 |
| r/m | 0.1 | Ir/(kg·m2) | 1.1 |
| L/m | 0.8 | Ir/(kg·m2) | 2.5 |
| B/m | 0.5 | τjot,max/(N·m) | 120 |
Table 1 Model parameters of platform
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| mb/kg | 48 | ksxi/(N·m-1) | 5000 |
| mwi/kg | 3 | csxi/(N·s·m-1) | 150 |
| l1/m | 0.3 | kszi/(N·m-1) | 6000 |
| l2/m | 0.3 | cszi/(N·s·m-1) | 200 |
| r/m | 0.1 | Ir/(kg·m2) | 1.1 |
| L/m | 0.8 | Ir/(kg·m2) | 2.5 |
| B/m | 0.5 | τjot,max/(N·m) | 120 |
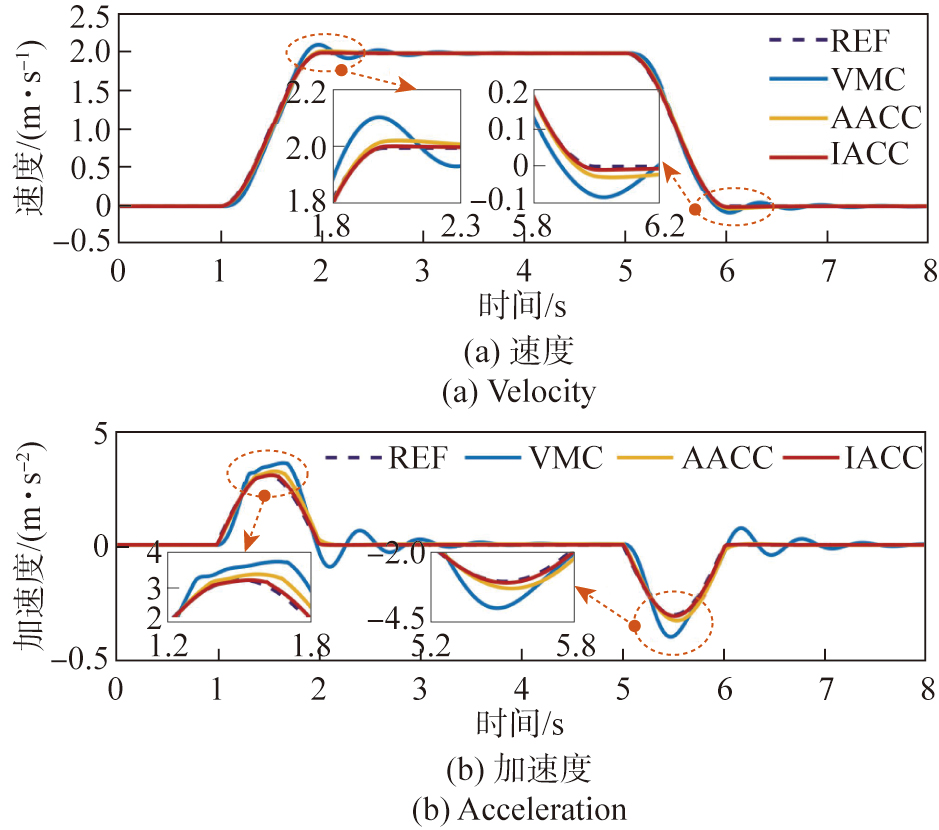
Fig.9 Comparison of speed tracking for acceleration and deceleration conditions
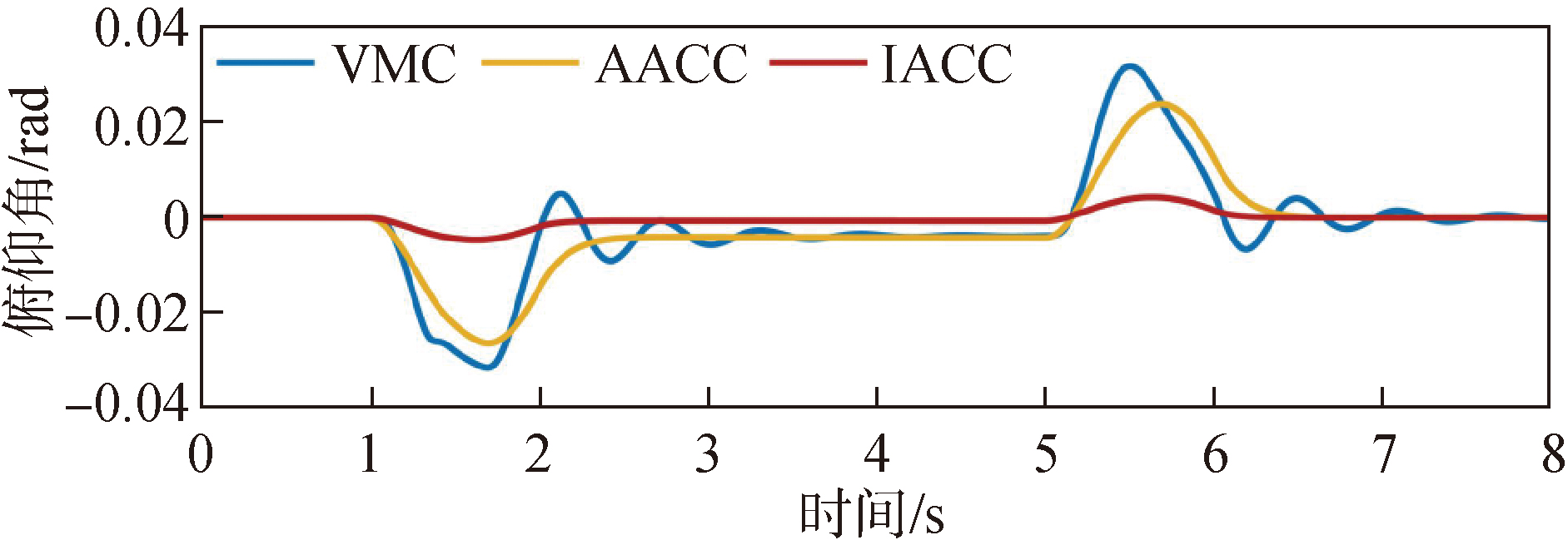
Fig.10 Comparison of pitch angles during acceleration and deceleration in acceleration and deceleration conditions

Fig.11 Comparison of speed tracking for speed bump conditions
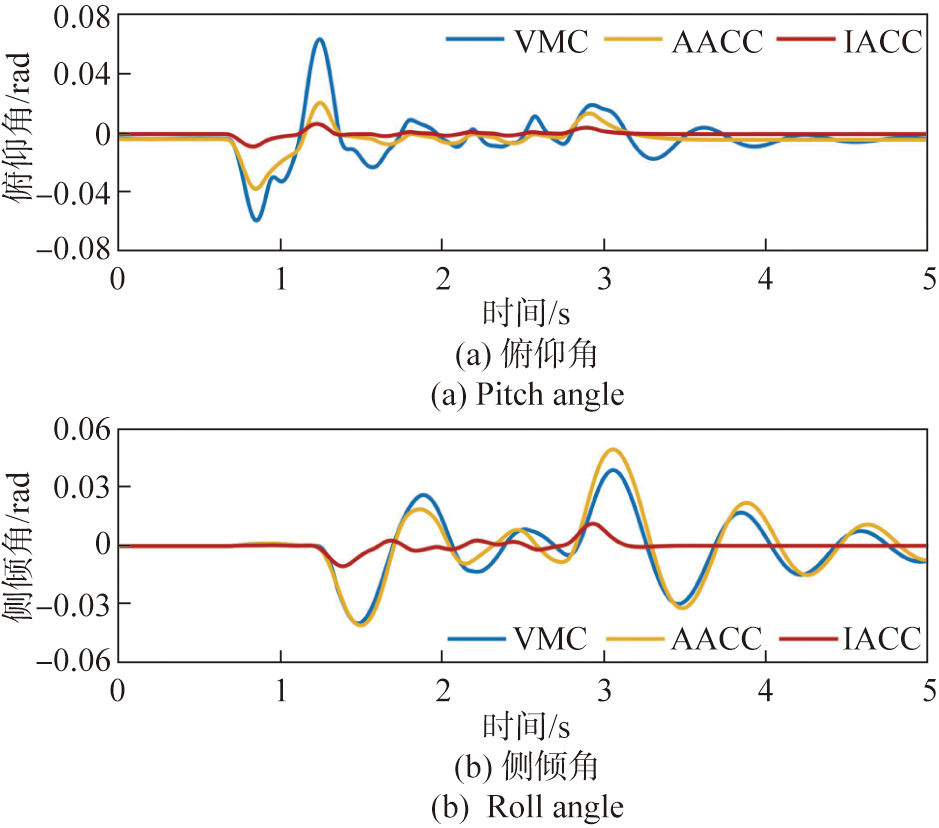
Fig.12 Comparison of attitude angle variations in speed bump conditions

Fig.13 Vertical response curves of sprung mass in speed bump conditions

Fig.14 Comparison of speed tracking for alternating single-side bridge condition
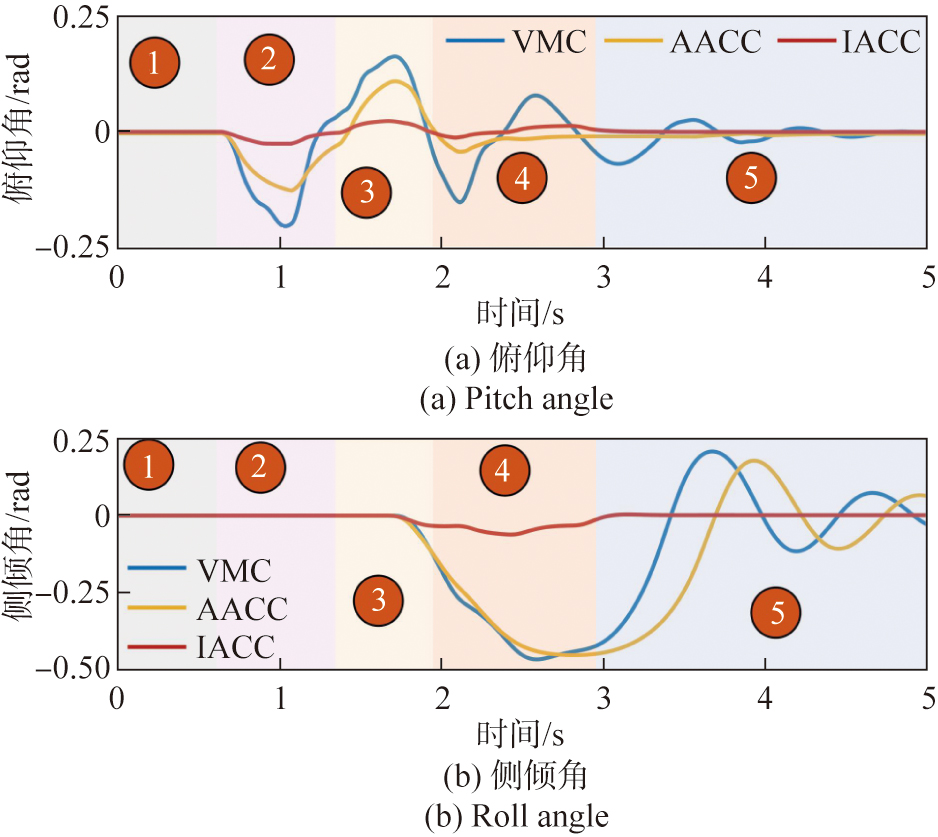
Fig.15 Comparison of attitude angle responses in alternating single-side bridge condition

Fig.16 Vertical response curves of sprung mass in alternating single-side bridge condition
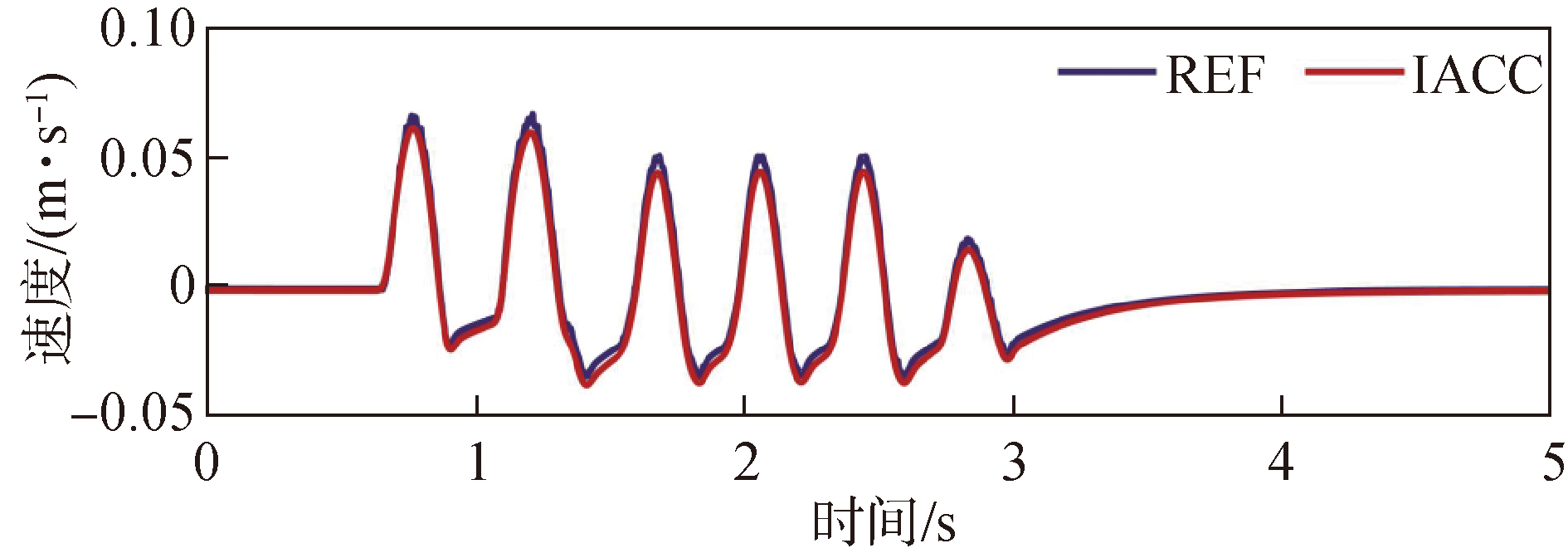
Fig.17 Vertical velocity estimation curve in speed bump condition
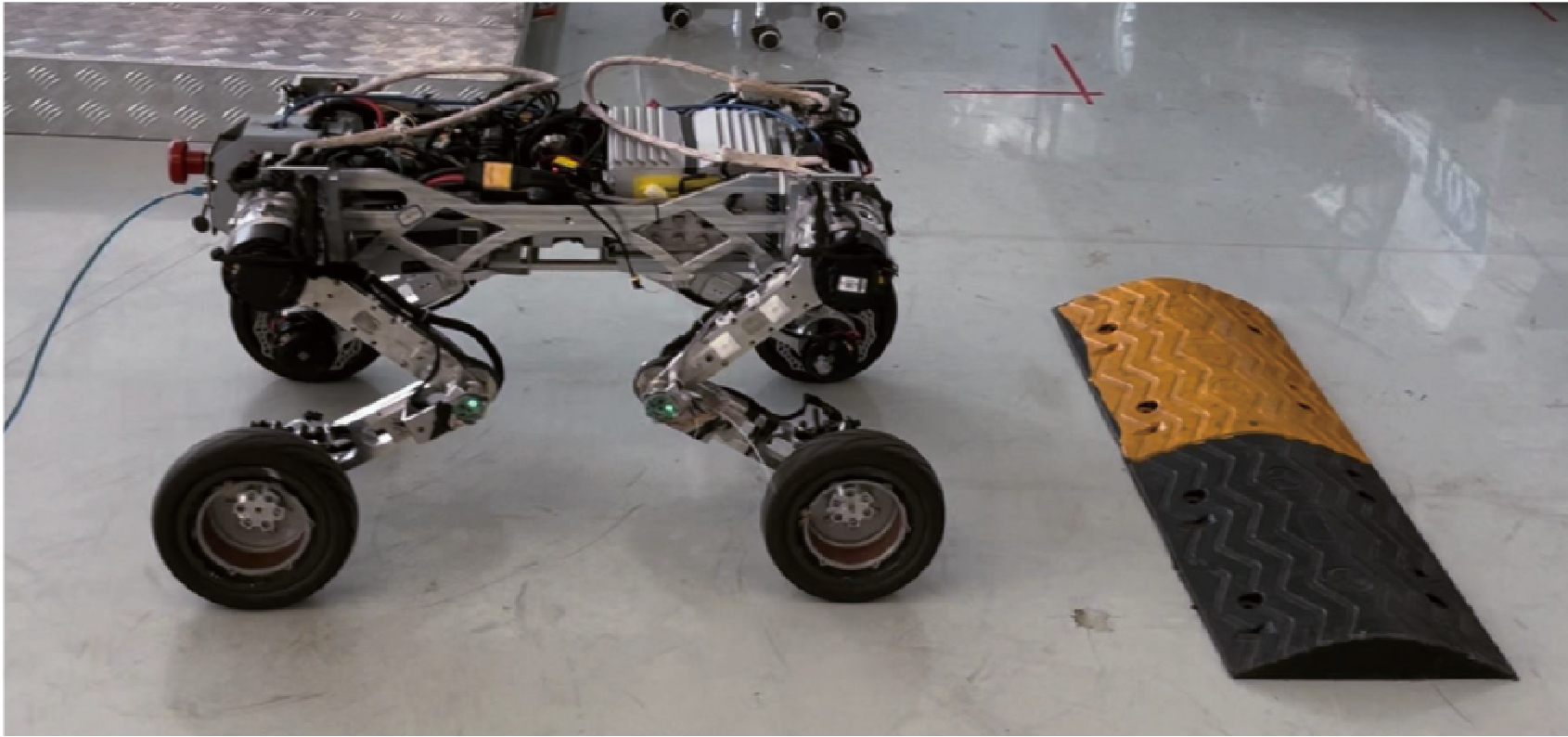
Fig.18 Speed bump test scenario for wheeled-legged platform

Fig.19 Vertical response characteristics in speed bump condition
| [1] |
任晓磊, 刘辉, 韩立金, 等. 复杂地形下轮腿复合机动平台动态运动控制[J]. 兵工学报, 2024, 45(9):2993-3003.
doi: 10.12382/bgxb.2023.0636 |
|
doi: 10.12382/bgxb.2023.0636 |
|
| [2] |
|
| [3] |
刘辉, 刘宝帅, 廖登廷, 等. 基于前馈补偿的轮腿式机动平台姿态自适应控制[J]. 兵工学报, 2023, 44(9):2756-2767.
doi: 10.12382/bgxb.2022.1103 |
|
doi: 10.12382/bgxb.2022.1103 |
|
| [4] |
doi: 10.1109/TMECH.2022.3176638 URL |
| [5] |
doi: 10.1109/TASE.2023.3345876 URL |
| [6] |
doi: 10.1007/s42235-023-00468-1 |
| [7] |
doi: 10.1038/s41598-023-41462-1 |
| [8] |
doi: 10.1109/LRA.2019.2899750 URL |
| [9] |
doi: 10.1016/j.mechmachtheory.2020.103984 URL |
| [10] |
doi: 10.1109/LRA.2024.3522773 URL |
| [11] |
|
| [12] |
|
| [13] |
doi: 10.1109/LSP.2016. URL |
| [14] |
doi: 10.1109/LRA.2021.3100269 URL |
| [15] |
doi: 10.1177/02783649221102473 URL |
| [16] |
doi: 10.1109/TMECH.3516 URL |
| [17] |
刘辉, 马嘉勇, 杨海洋, 等. 基于前馈补偿的轮腿式平台多任务复合运动解耦控制[J]. 北京理工大学学报, 2025, 45(1):26-33.
|
|
|
|
| [18] |
doi: 10.1177/02783640122067309 URL |
| [19] |
倪利伟, 张红松, 马宗正, 等. 基于模型降维的轮腿机器人姿态控制试验[J/OL]. 吉林大学学报(工学版),1-9[2025-04-14].https://doi.org/10.13229/j.cnki.jdxbgxb.20241171.
|
|
|
|
| [20] |
doi: 10.1016/j.robot.2024.104818 URL |
| [21] |
|
| [22] |
doi: 10.1109/TIE.2025.3528486 URL |
| [23] |
doi: 10.1109/TMECH.2021.3100879 URL |
| [24] |
|
| [25] |
|
| [26] |
|
| [1] | QIN Yuemei, CHEN Zhong, YANG Yanbo, LI Shuying. Joint State Equality Constraint Identification and Recursive Filtering Based on Deep Learning [J]. Acta Armamentarii, 2025, 46(6): 240578-. |
| [2] | WANG Yong’an, LI Dongguang, WU Hao, LIU Yang. An Adaptive Filtering-disturbance Observer-based State Estimation Algorithm for Large Ships [J]. Acta Armamentarii, 2024, 45(7): 2318-2328. |
| [3] | LI Yongyao, JIANG Lei, LIU Yufei, SUN Zeyuan, ZHENG Dongdong. A Review of Stable Grasping Methods for Humanoid Dexterous Hands [J]. Acta Armamentarii, 2023, 44(11): 3237-3252. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||