
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250197-.doi: 10.12382/bgxb.2025.0197
Previous Articles Next Articles
WU Danfeng1,2, CHEN Tongzhou3, KUANG Minchi4,*( ), SONG Chunsen5, ZHOU Fenfen1,2, ZHANG Xueyan1,2
), SONG Chunsen5, ZHOU Fenfen1,2, ZHANG Xueyan1,2
Received:2025-03-20
Online:2025-11-27
Contact:
KUANG Minchi
CLC Number:
WU Danfeng, CHEN Tongzhou, KUANG Minchi, SONG Chunsen, ZHOU Fenfen, ZHANG Xueyan. Negative Obstacle Detection for Ground Unmanned Vehicles Using Multiple Types of LiDAR in Unstructured Environments[J]. Acta Armamentarii, 2025, 46(11): 250197-.
Add to citation manager EndNote|Ris|BibTeX
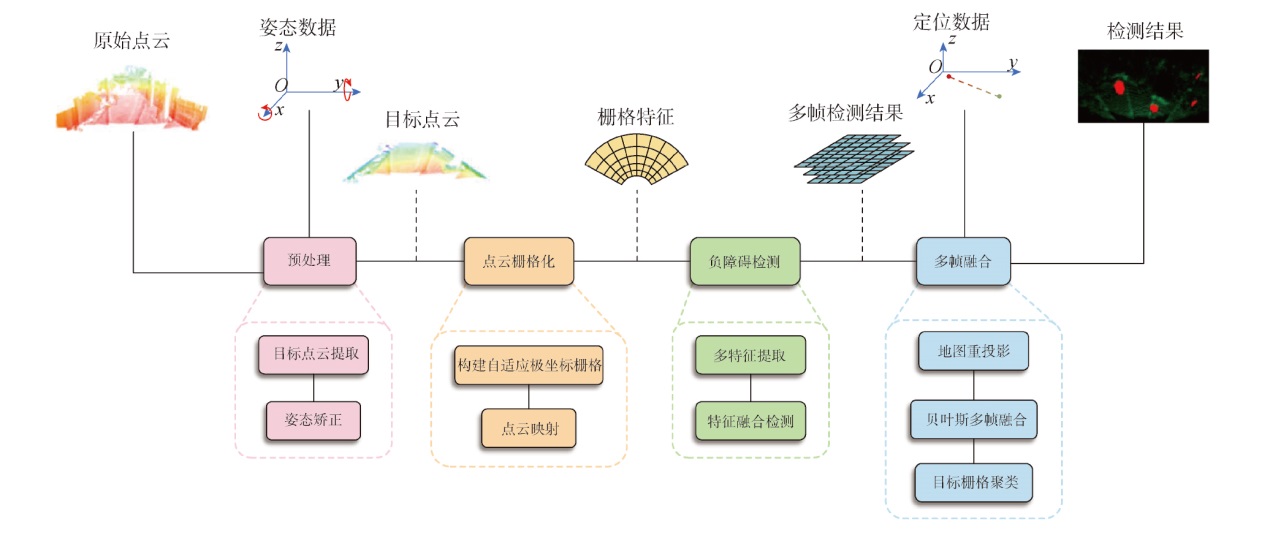
Fig.1 System framework
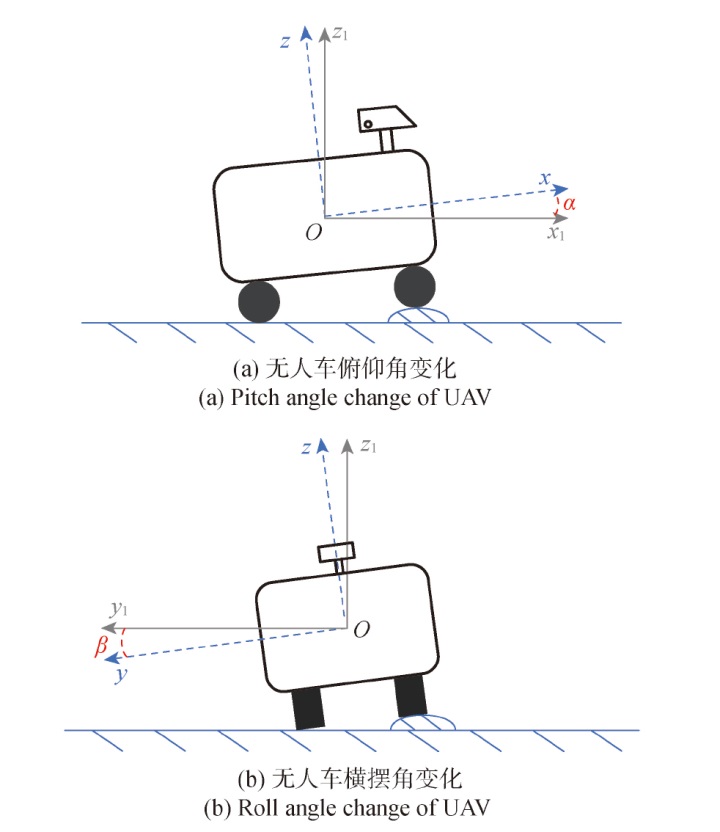
Fig.2 The jolting of UAV
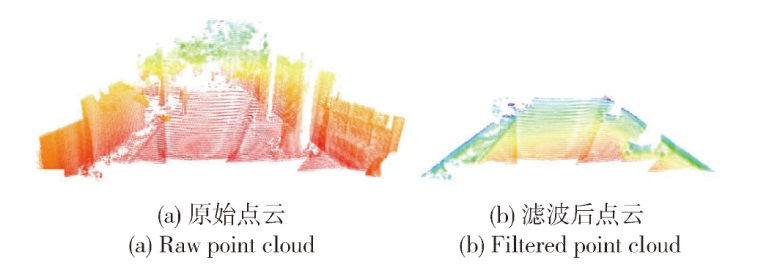
Fig.3 Point cloud filtering
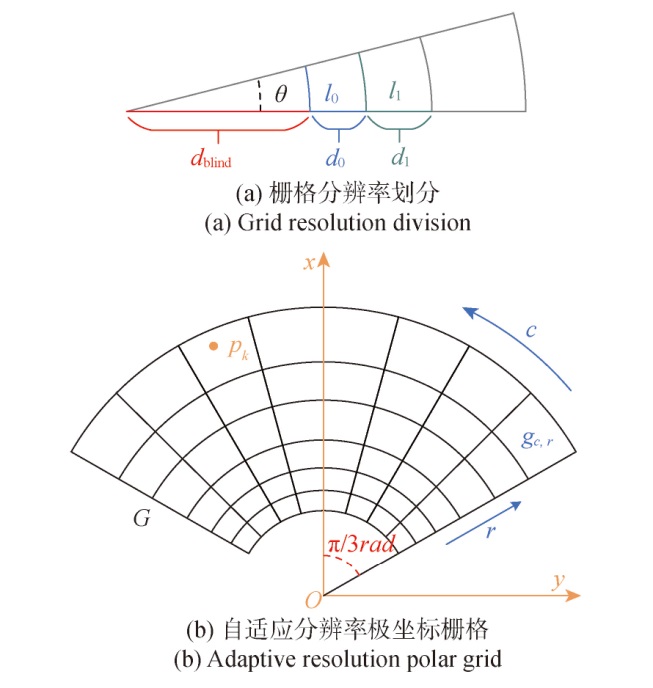
Fig.4 Adaptive resolution polar grid construction
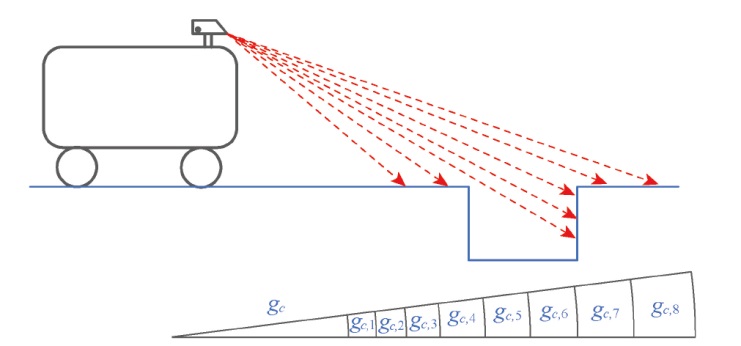
Fig.5 Imaging principle of negative obstacle point clouds

Fig.6 Change in an amount of negative obstacle point clouds
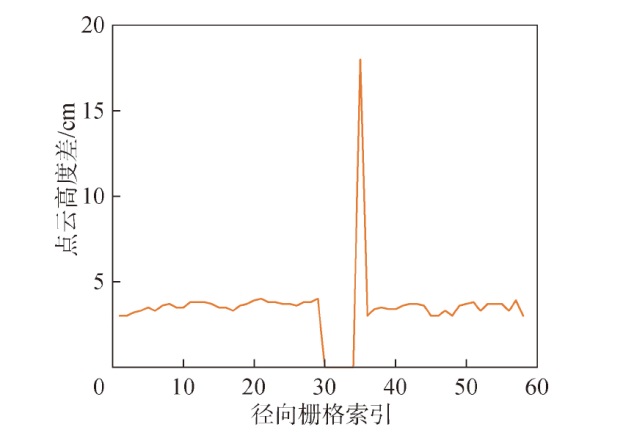
Fig.7 Change in height difference of negative obstacle point clouds
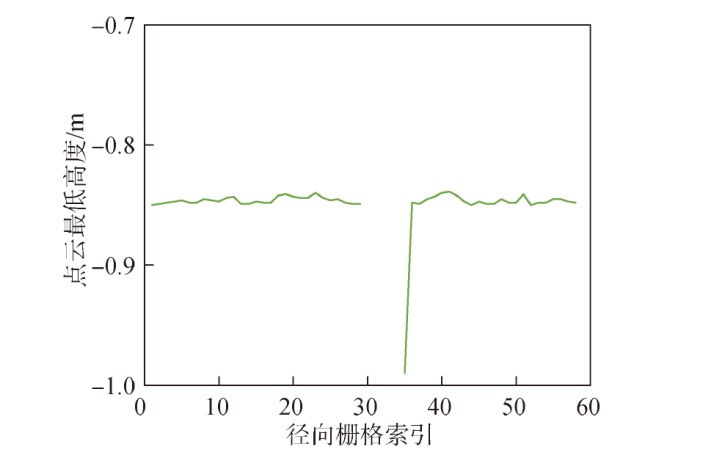
Fig.8 Change in minimum height of negative obstacle point clouds
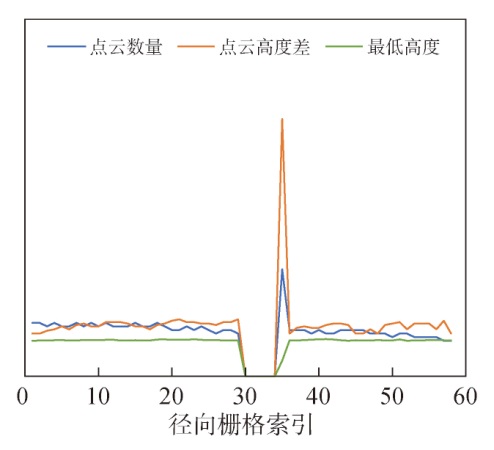
Fig.9 Multi-feature fusion
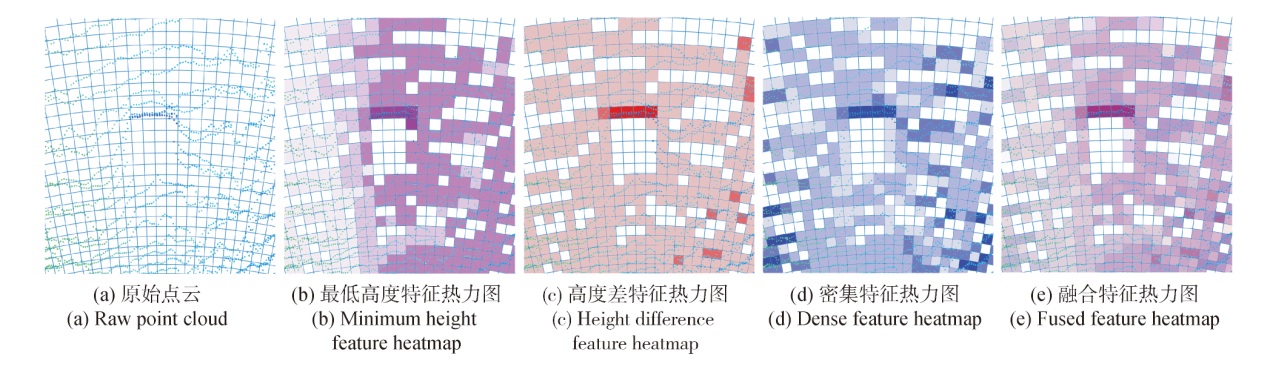
Fig.10 Multi-feature thermal distribution
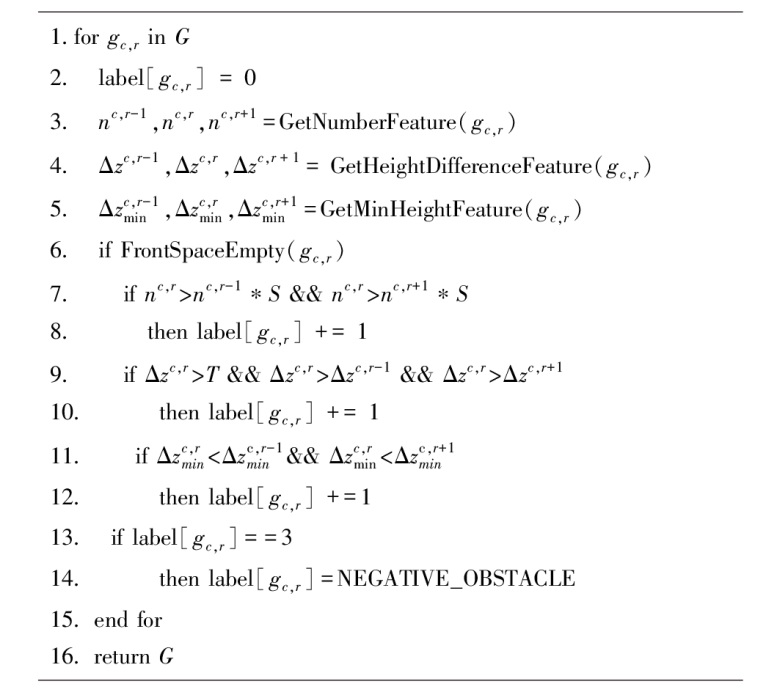
Fig.11 Negative obstacle area detection algorithm based on feature descriptor
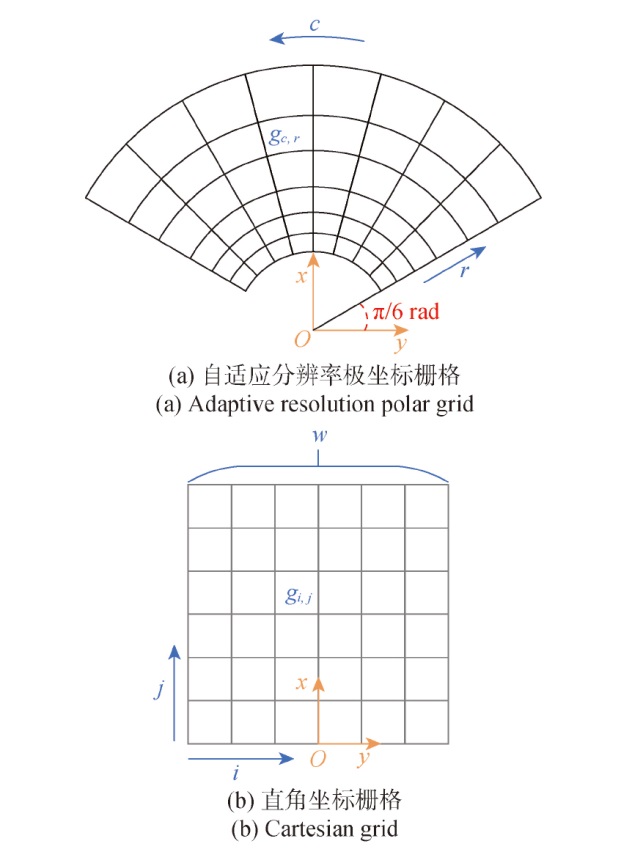
Fig.12 Map reprojection

Fig.13 Bayesian grid probability evolution map

Fig.14 Negative obstacle clustering based on two-dimensional grid connectivity
| 聚类 | 场景1 | 场景2 | 场景3 |
|---|---|---|---|
| 无聚类 | | | |
| 有聚类 | | | |
Table 1 Negative obstacle clustering
| 聚类 | 场景1 | 场景2 | 场景3 |
|---|---|---|---|
| 无聚类 | | | |
| 有聚类 | | | |
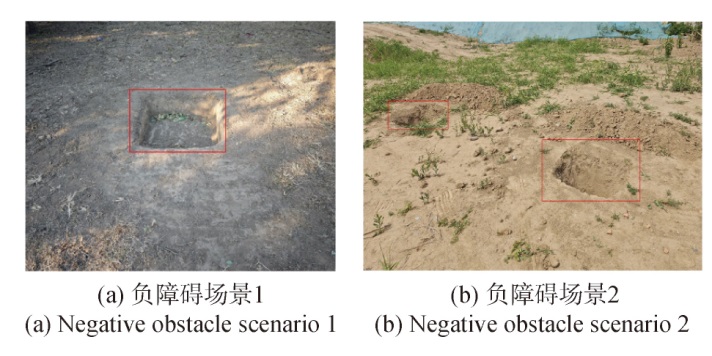
Fig.15 Experimental scenario
| 栅格类型 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|
| 固定分辨率 极坐标栅格 | | | |
| 直角坐标栅格 | | | |
| 自适应分辨率 极坐标栅格 | | | |
Table 2 Experimental results on validation of adaptive resolution polar grid
| 栅格类型 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|
| 固定分辨率 极坐标栅格 | | | |
| 直角坐标栅格 | | | |
| 自适应分辨率 极坐标栅格 | | | |
| 栅格类型 | 指标 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|---|
| 直角坐标栅格 | IoU | 0.71 | 0.69 | 0.51 |
| 固定分辨率极坐标栅格 | IoU | 0.79 | 0.68 | 0.55 |
| 自适应分辨率极坐标栅格 | IoU | 0.82 | 0.71 | 0.58 |
Table 3 Experimental results on validation of adaptive resolution polar grid
| 栅格类型 | 指标 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|---|
| 直角坐标栅格 | IoU | 0.71 | 0.69 | 0.51 |
| 固定分辨率极坐标栅格 | IoU | 0.79 | 0.68 | 0.55 |
| 自适应分辨率极坐标栅格 | IoU | 0.82 | 0.71 | 0.58 |
| 特征类型 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|
| 融合特征 | | | |
| 去除密集空洞特征 | | | |
| 去除高度差特征 | | | |
| 去除最低高度特征 | | | |
Table 4 Experimental results on the effectiveness of negative obstacle grid feature descriptor
| 特征类型 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|
| 融合特征 | | | |
| 去除密集空洞特征 | | | |
| 去除高度差特征 | | | |
| 去除最低高度特征 | | | |
| 特征类型 | 指标 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|---|
| 去除密集空洞特征 | FPR | 0.16 | 0.11 | 0.17 |
| 去除高度差特征 | FPR | 0.15 | 0.16 | 0.12 |
| 去除最低高度特征 | FPR | 0.09 | 0.13 | 0.20 |
| 融合特征 | FPR | 0.07 | 0.11 | 0.10 |
Table 5 Experimental results on the effectiveness of negative obstacle grid feature descriptor
| 特征类型 | 指标 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|---|
| 去除密集空洞特征 | FPR | 0.16 | 0.11 | 0.17 |
| 去除高度差特征 | FPR | 0.15 | 0.16 | 0.12 |
| 去除最低高度特征 | FPR | 0.09 | 0.13 | 0.20 |
| 融合特征 | FPR | 0.07 | 0.11 | 0.10 |
| 策略 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|
| 多帧融合 | | | |
| 单帧检测 | | | |
Table 6 Experimental results on the effectiveness of multi-frame data fusion
| 策略 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|
| 多帧融合 | | | |
| 单帧检测 | | | |
| 检测类型 | 指标 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|---|
| 单帧检测 | IoU | 0.70 | 0.63 | 0.44 |
| 多帧融合 | IoU | 0.79 | 0.70 | 0.55 |
Table 7 Experimental results on the effectiveness of multi-frame data fusion
| 检测类型 | 指标 | 5~10m | 10~15m | 15~20m |
|---|---|---|---|---|
| 单帧检测 | IoU | 0.70 | 0.63 | 0.44 |
| 多帧融合 | IoU | 0.79 | 0.70 | 0.55 |
| 场景 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 场景1 | | | |
| 场景2 | | | |
| 场景3 | | | |
Table 8 Comparative experimental results of hybrid solid-state LiDAR
| 场景 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 场景1 | | | |
| 场景2 | | | |
| 场景3 | | | |
| 场景 | 指标 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|---|
| 场景1 | IoU | 0.80 | 0.76 | 0.71 |
| 场景2 | IoU | 0.79 | 0.78 | 0.75 |
| 场景3 | IoU | 0.74 | 0.72 | 0.71 |
Table 9 Comparative experimental results of hybrid solid-state LiDAR
| 场景 | 指标 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|---|
| 场景1 | IoU | 0.80 | 0.76 | 0.71 |
| 场景2 | IoU | 0.79 | 0.78 | 0.75 |
| 场景3 | IoU | 0.74 | 0.72 | 0.71 |
| 计算对象及 平均耗时 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 计算对象 | 栅格 | 三维点云 | 点云对 |
| 平均耗时/ms | 6 | 9 |
Table 10 Comparison results of hybrid solid-state LiDARs performances
| 计算对象及 平均耗时 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 计算对象 | 栅格 | 三维点云 | 点云对 |
| 平均耗时/ms | 6 | 9 |
| 场景 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 场景1 | | | |
| 场景2 | | | |
Table 11 Experimental results of mechanical LiDARs
| 场景 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 场景1 | | | |
| 场景2 | | | |
| 场景 | 指标 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|---|
| 场景1 | IoU | 0.83 | 0.73 | 0.80 |
| 场景2 | IoU | 0.84 | 0.69 | 0.85 |
Table 12 Experimental results of mechanical LiDAR
| 场景 | 指标 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|---|
| 场景1 | IoU | 0.83 | 0.73 | 0.80 |
| 场景2 | IoU | 0.84 | 0.69 | 0.85 |
| 计算对象及 平均耗时 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 计算对象 | 栅格 | 三维点云 | 点云对 |
| 平均耗时/ms | 4 | 6 |
Table 13 Performance comparison of mechanical LiDARs
| 计算对象及 平均耗时 | 本文方法 | 文献[ | 文献[ |
|---|---|---|---|
| 计算对象 | 栅格 | 三维点云 | 点云对 |
| 平均耗时/ms | 4 | 6 |
| [24] |
|
| [25] |
doi: 10.1109/LRA.2024.3414256 URL |
| [1] |
|
| [2] |
周梦如, 陈慧岩, 熊光明, 等. 越野环境下无人履带平台的道路可通行性分析[J]. 兵工学报, 2022, 43(10):2485-2496.
doi: 10.12382/bgxb.2021.0824 |
|
doi: 10.12382/bgxb.2021.0824 |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
doi: 10.3390/app15042076 URL |
| [8] |
|
| [9] |
doi: 10.3390/s22228878 URL |
| [10] |
doi: 10.3390/su15010120 URL |
| [11] |
doi: 10.3390/electronics12040826 URL |
| [12] |
|
| [13] |
doi: 10.1109/TITS.2024.3431671 URL |
| [14] |
|
| [15] |
|
| [16] |
刘家银, 唐振民, 王安东, 等. 基于多激光雷达与组合特征的非结构化环境负障碍物检测[J]. 机器人, 2017, 39(5):638-651.
doi: 10.13973/j.cnki.robot.2017.0638 |
|
doi: 10.13973/j.cnki.robot.2017.0638 |
|
| [17] |
|
| [18] |
|
| [19] |
doi: 10.1002/rob.2016.33.issue-5 URL |
| [20] |
|
| [21] |
|
| [22] |
doi: 10.3390/s24247929 URL |
| [23] |
doi: 10.3390/s20185048 URL |
| [1] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [2] | FENG Yu, XIE Guangda, LIU Long, SU Yunquan, LIU Junwei, GENG Yandong, MIAO Lie. LiDAR Object Detection Method Based on Point Cloud Mask Pre-training and Gaussian Localization Uncertainty Estimation [J]. Acta Armamentarii, 2025, 46(6): 240788-. |
| [3] | JIN Zhe, JIANG Chaoyang. Degeneration Correction of LiDAR SLAM for UGV Leapfrog Cooperation [J]. Acta Armamentarii, 2025, 46(3): 240161-. |
| [4] | XIAO Yang, SU Bo, JI Chao, YANG Dezhen, ZHOU Tong. System Safety Analysis of Unmanned Ground Vehicles Based on STPA Method and Bow-Tie Model [J]. Acta Armamentarii, 2024, 45(S2): 153-161. |
| [5] | JI Peng, GUO Minghao. Local Path Planning for Unmanned Ground Vehicles Based on Improved Artificial Potential Field Method in Frenet Coordinate System [J]. Acta Armamentarii, 2024, 45(7): 2097-2109. |
| [6] | JIA Yifei, JIANG Chaoyang. Dynamic Reconfigurable Adaptive UGV Formation System [J]. Acta Armamentarii, 2024, 45(10): 3654-3673. |
| [7] | FANG Qiuyu, ZHANG Yunlin, MA Zhuangzhuang, SHAO Jinliang. Control Barrier Functions-based Trajectory Planning for Unmanned Ground Vehicles in Unknown Environment [J]. Acta Armamentarii, 2023, 44(S2): 90-102. |
| [8] | ZHAO Xijun, CUI Xing, LI Zhaodong, WANG Yiquan, YANG Yu. Adaptive Inter-vechile Distance Control for Unmanned Ground Vehicle Convoy [J]. Acta Armamentarii, 2023, 44(S2): 44-51. |
| [9] | LI Zhaodong, ZHAO Xijun, YANG Tingting, QI Xiaolong, ZHOU Changyi, ZHANG Liming. Key Technologies and Application Prospects for High-definition Map in Off-road Environments [J]. Acta Armamentarii, 2023, 44(S2): 1-11. |
| [10] | LIU Bin, LI Xuemei. A Self-adaptive Dual Radius Filtering Algorithm Based on LiDAR Point Cloud [J]. Acta Armamentarii, 2023, 44(9): 2768-2777. |
| [11] | HUO Jian, CHEN Huimin, MA Yunfei, GUO Pengyu, YANG Xu, MENG Xiangsheng. Vehicle Target Recognition Algorithm Based on MEMS LiDAR [J]. Acta Armamentarii, 2023, 44(4): 940-948. |
| [12] | XIONG Guangming, YU Quanfu, HU Xiuzhong, ZHOU Zijie, XU Jiahui. A Motion Planner for Unmanned Tracked Vehicles in Multi-storey Buildings Considering the Characteristics of Vehicles [J]. Acta Armamentarii, 2023, 44(3): 841-850. |
| [13] | PAN Bo, LI Shengfei, WANG Yang, TAN Senqi, ZHANG Naisi, LUO Tian, CUI Xing. Integrated Control Method of Multi-axle Distributed Driving Unmanned Ground Vehicle in Handling Limit [J]. Acta Armamentarii, 2023, 44(11): 3279-3294. |
| [14] | GUAN Haijie, WANG Boyang, WANG Xurui, LIU Hai’ou, CHEN Huiyan. A Review on the Development of Military Unmanned Ground System with Mission Payload [J]. Acta Armamentarii, 2023, 44(11): 3333-3344. |
| [15] | GONG Shixiong, WANG Xu, KONG Guojie, GONG Jianwei. Methods for Multi-Vehicle Cooperative Object Tracking [J]. Acta Armamentarii, 2022, 43(10): 2429-2442. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||