
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250199-.doi: 10.12382/bgxb.2025.0199
Previous Articles Next Articles
SHI Zhaofeng1, SONG Shengtao1,2,*( ), NING Fengping1, ZHANG Lei1, DENG Lianzheng1, GUO Wenxiao3
), NING Fengping1, ZHANG Lei1, DENG Lianzheng1, GUO Wenxiao3
Received:2025-03-20
Online:2025-11-27
Contact:
SONG Shengtao
CLC Number:
SHI Zhaofeng, SONG Shengtao, NING Fengping, ZHANG Lei, DENG Lianzheng, GUO Wenxiao. Kinematics and Performance Analysis of a Novel Bipedal Mobile Robot[J]. Acta Armamentarii, 2025, 46(11): 250199-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Structure of bipedal robot
| 足式移动机器人 | 驱动数量 | 特点 |
|---|---|---|
| WL-16RIV[ | 12 | 6自由度,双并联机构,出色的行走与负载能力,应用场景丰富 |
| 串并混联腿机构双足机器人[ | 12 | 6自由度,双并联机构,运动灵活,工作范围大 |
| MPLBR[ | 6 | 3自由度,双并联机构,可实现多种运动模式 |
| 基于广义并联机构的仿人腿双足机器人[ | 12 | 6自由度,双并联机构,所有驱动放置在定平台上,具有高刚度优点 |
| 四足/双足可重构并联腿移动机器人[ | 24 | 6自由度,双并联机构,通过可重构,可满足多种场景需求 |
| 三平台双足机器人[ | 12 | 6自由度,双并联机构,承载力强 |
| 三平台六足机器人[ | 12 | 3自由度,双并联机构,稳定性高,适用于多种复杂地形 |
| 双平台双足移动机器人 | 6 | 4自由度,单串并混联机构,通过动/静平台的切换,实现机器人运动 |
Table 1 Characteristics of current legged robots
| 足式移动机器人 | 驱动数量 | 特点 |
|---|---|---|
| WL-16RIV[ | 12 | 6自由度,双并联机构,出色的行走与负载能力,应用场景丰富 |
| 串并混联腿机构双足机器人[ | 12 | 6自由度,双并联机构,运动灵活,工作范围大 |
| MPLBR[ | 6 | 3自由度,双并联机构,可实现多种运动模式 |
| 基于广义并联机构的仿人腿双足机器人[ | 12 | 6自由度,双并联机构,所有驱动放置在定平台上,具有高刚度优点 |
| 四足/双足可重构并联腿移动机器人[ | 24 | 6自由度,双并联机构,通过可重构,可满足多种场景需求 |
| 三平台双足机器人[ | 12 | 6自由度,双并联机构,承载力强 |
| 三平台六足机器人[ | 12 | 3自由度,双并联机构,稳定性高,适用于多种复杂地形 |
| 双平台双足移动机器人 | 6 | 4自由度,单串并混联机构,通过动/静平台的切换,实现机器人运动 |
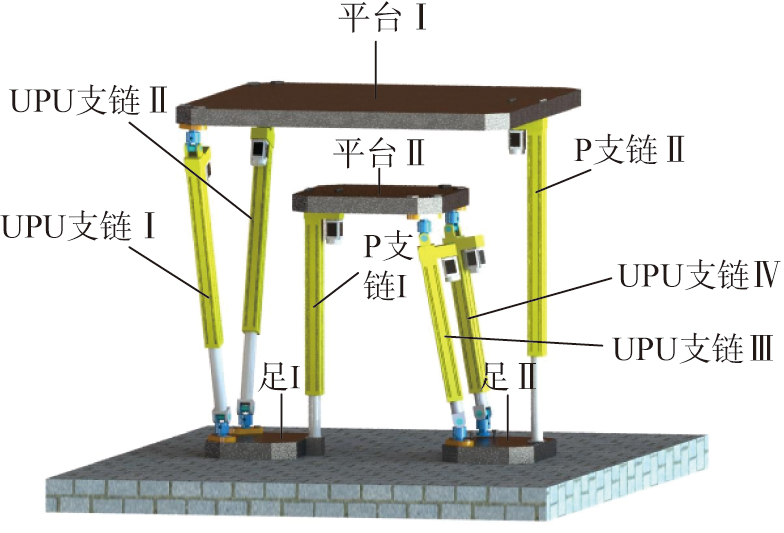
Fig.2 Overall mechanism
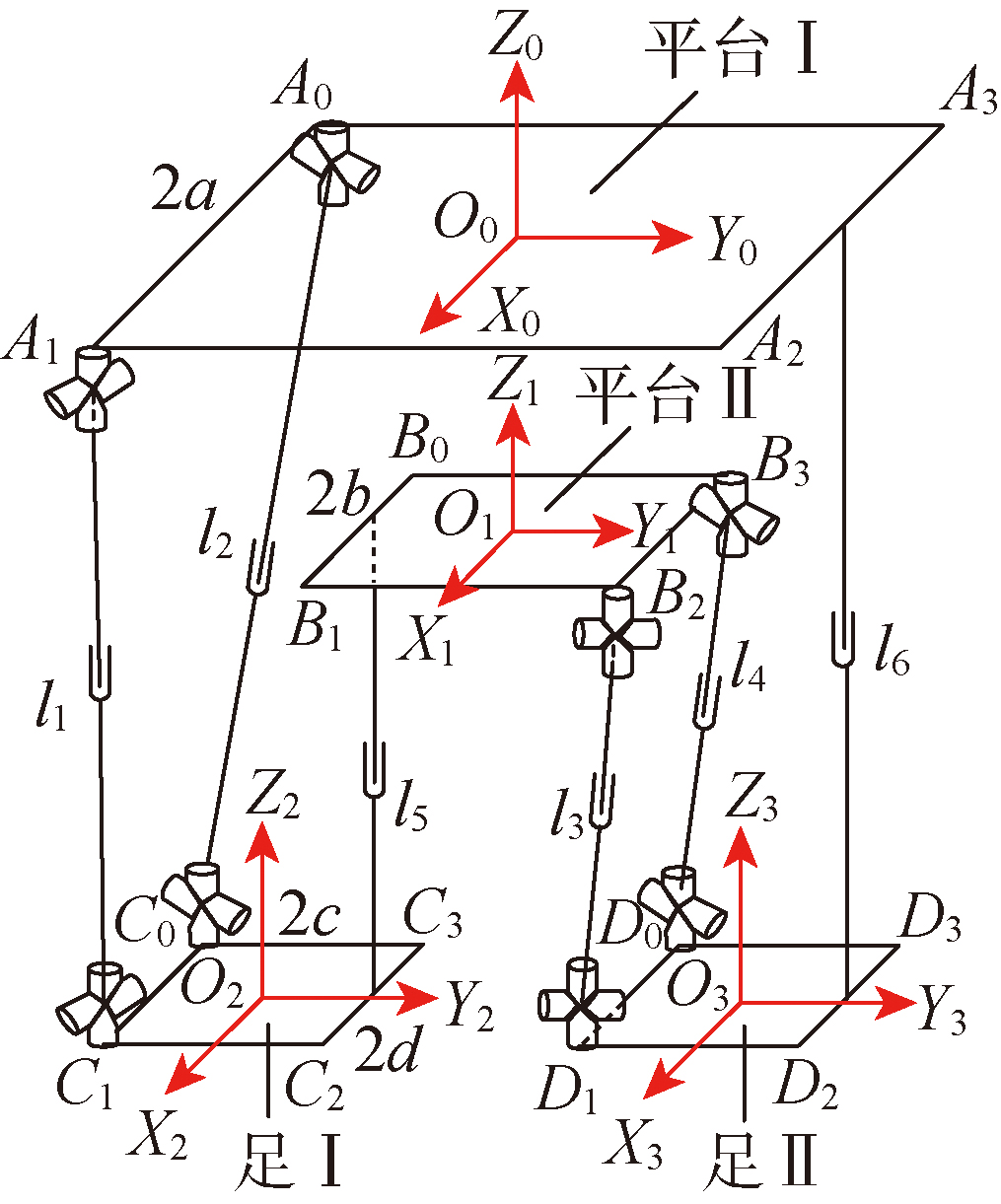
Fig.3 Schematic diagram of the mechanism

Fig.4 Schematic diagram of branch chain

Fig.5 Inverse solution coordinate system

Fig.6 Theoretical driving velocity curve
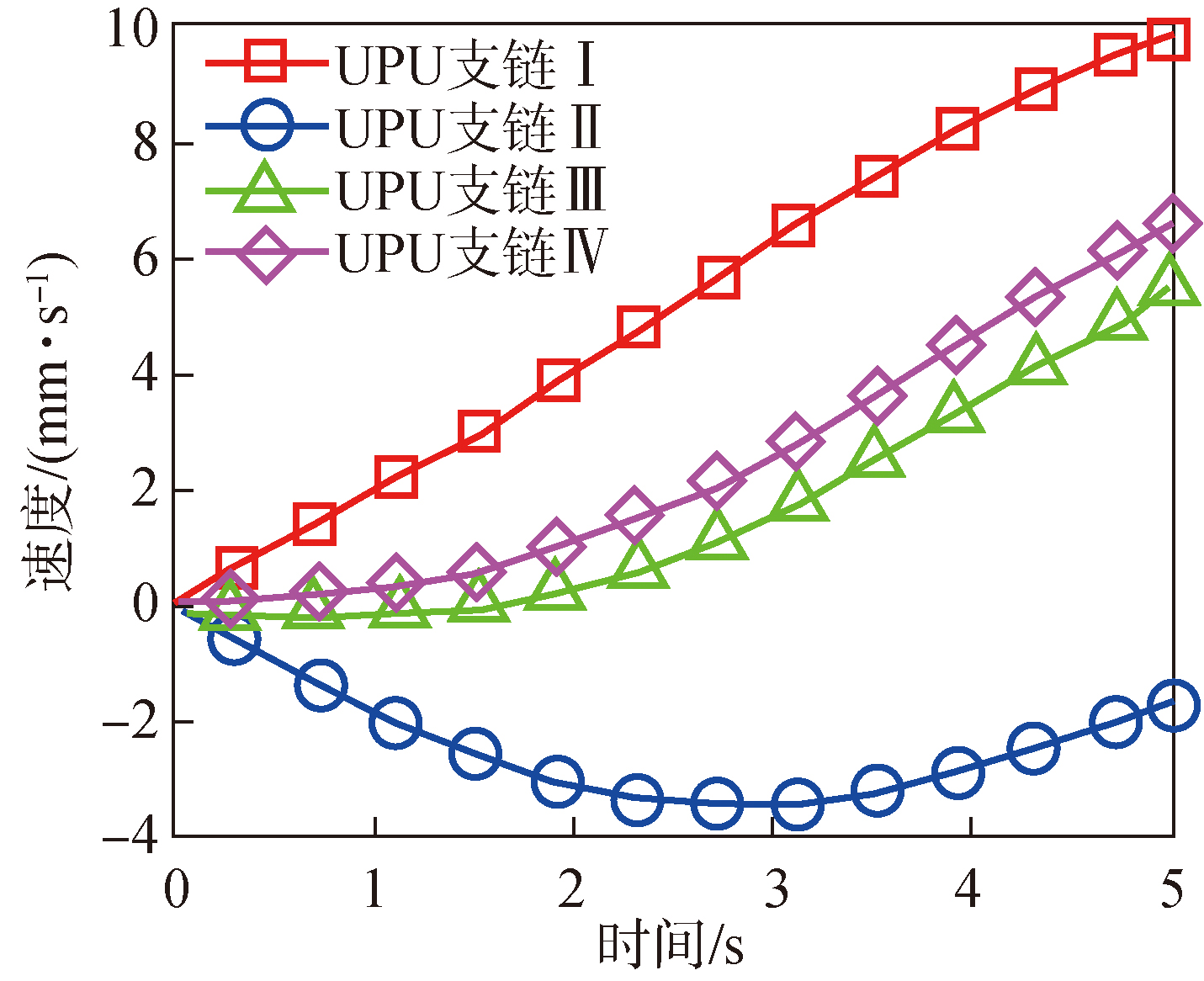
Fig.7 Simulation driving velocity curve
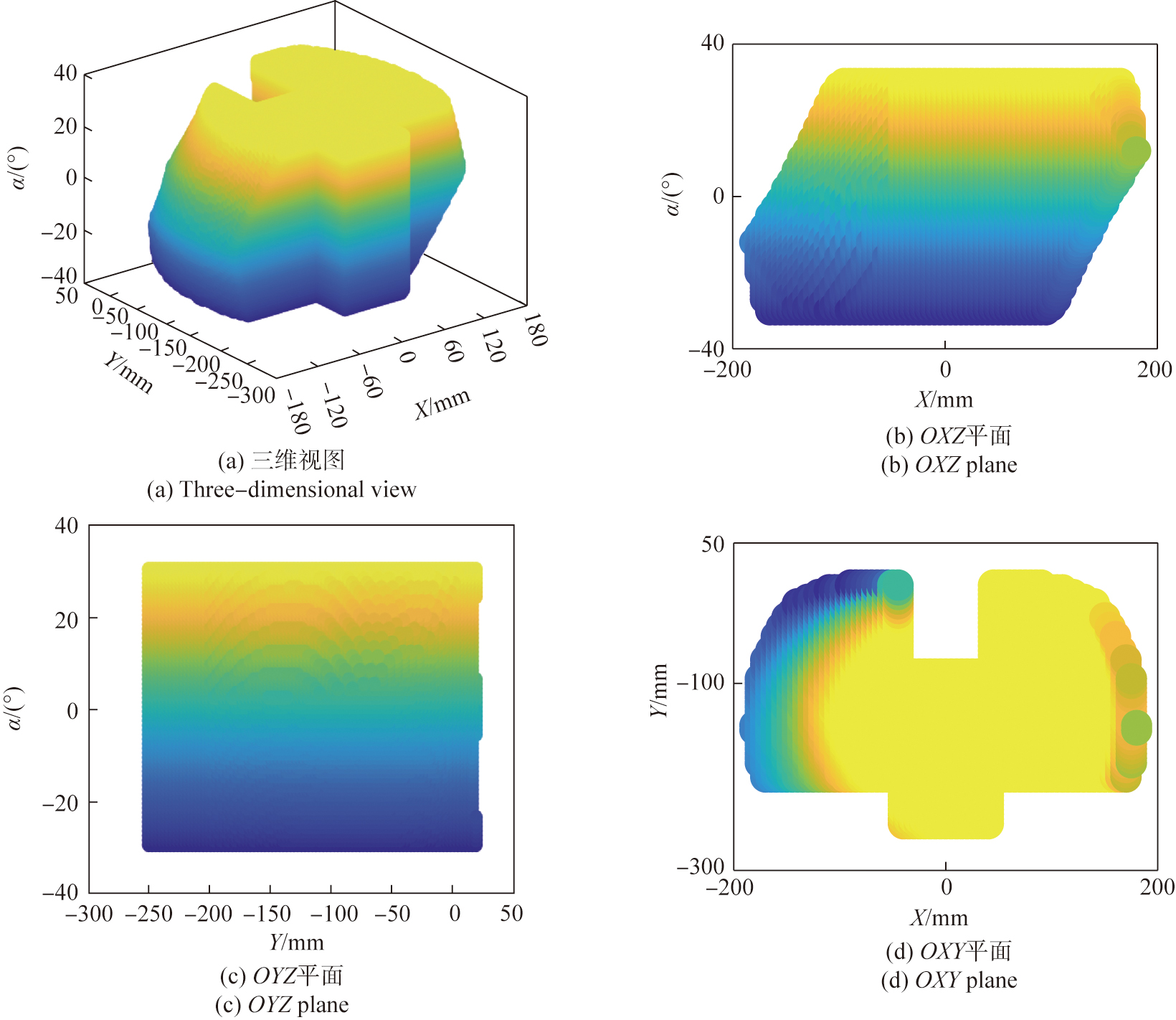
Fig.8 Reachable workspace of Foot I

Fig.9 Reachable workspace of Foot Ⅱ
| 驱动的 输入关节 | 锁定的 输入关节 | 平台Ⅱ-P链Ⅰ-足Ⅰ的约束力螺旋系 |
|---|---|---|
| UPU支链Ⅰ | UPU支链 Ⅱ、Ⅲ、Ⅳ | U1= |
| UPU支链Ⅱ | UPU支链 Ⅰ、Ⅲ、Ⅳ | U2=[ |
| UPU支链Ⅲ | UPU支链 Ⅰ、Ⅱ、Ⅳ | U3=[ |
| UPU支链Ⅳ | UPU支链 Ⅰ、Ⅱ、Ⅲ | U4=[ |
Table 2 Foot I increased wrench screw
| 驱动的 输入关节 | 锁定的 输入关节 | 平台Ⅱ-P链Ⅰ-足Ⅰ的约束力螺旋系 |
|---|---|---|
| UPU支链Ⅰ | UPU支链 Ⅱ、Ⅲ、Ⅳ | U1= |
| UPU支链Ⅱ | UPU支链 Ⅰ、Ⅲ、Ⅳ | U2=[ |
| UPU支链Ⅲ | UPU支链 Ⅰ、Ⅱ、Ⅳ | U3=[ |
| UPU支链Ⅳ | UPU支链 Ⅰ、Ⅱ、Ⅲ | U4=[ |
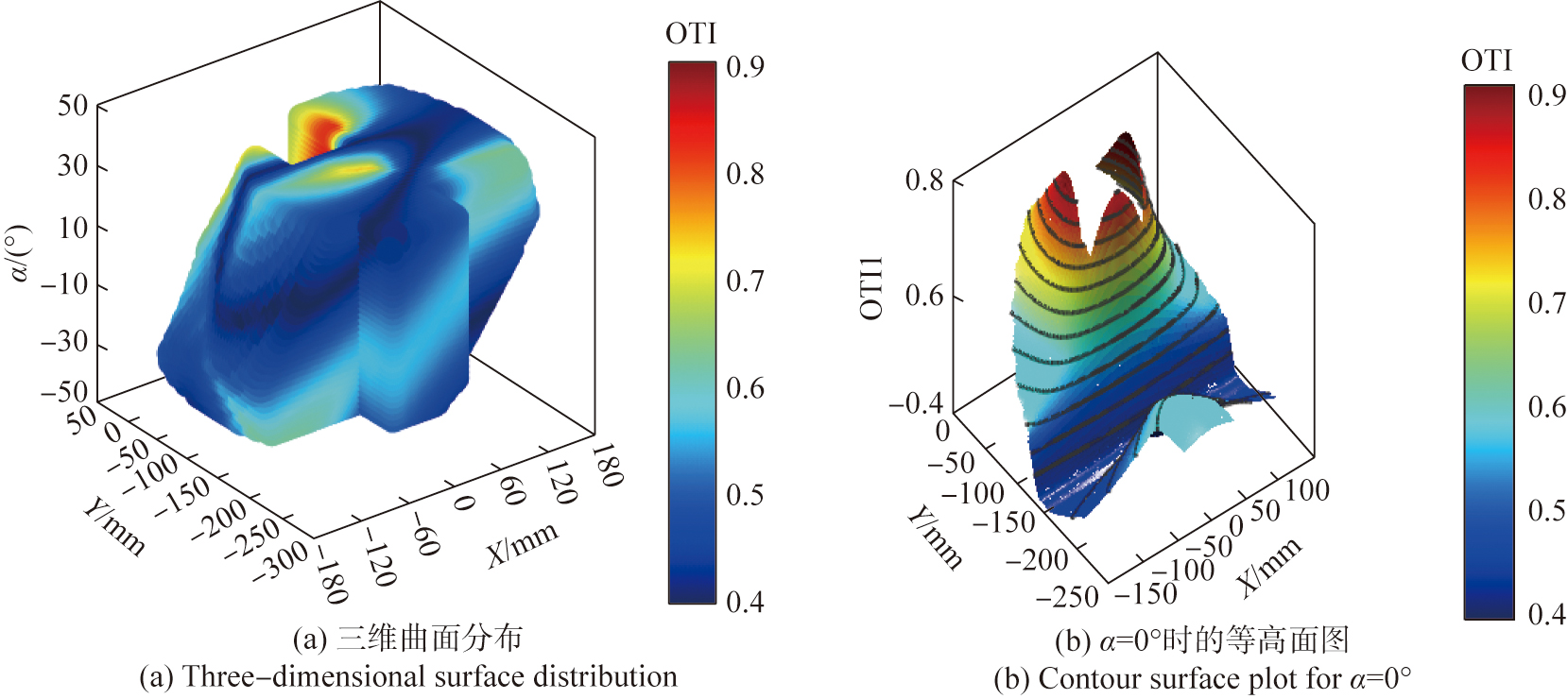
Fig.10 OTI1 distribution of Foot I
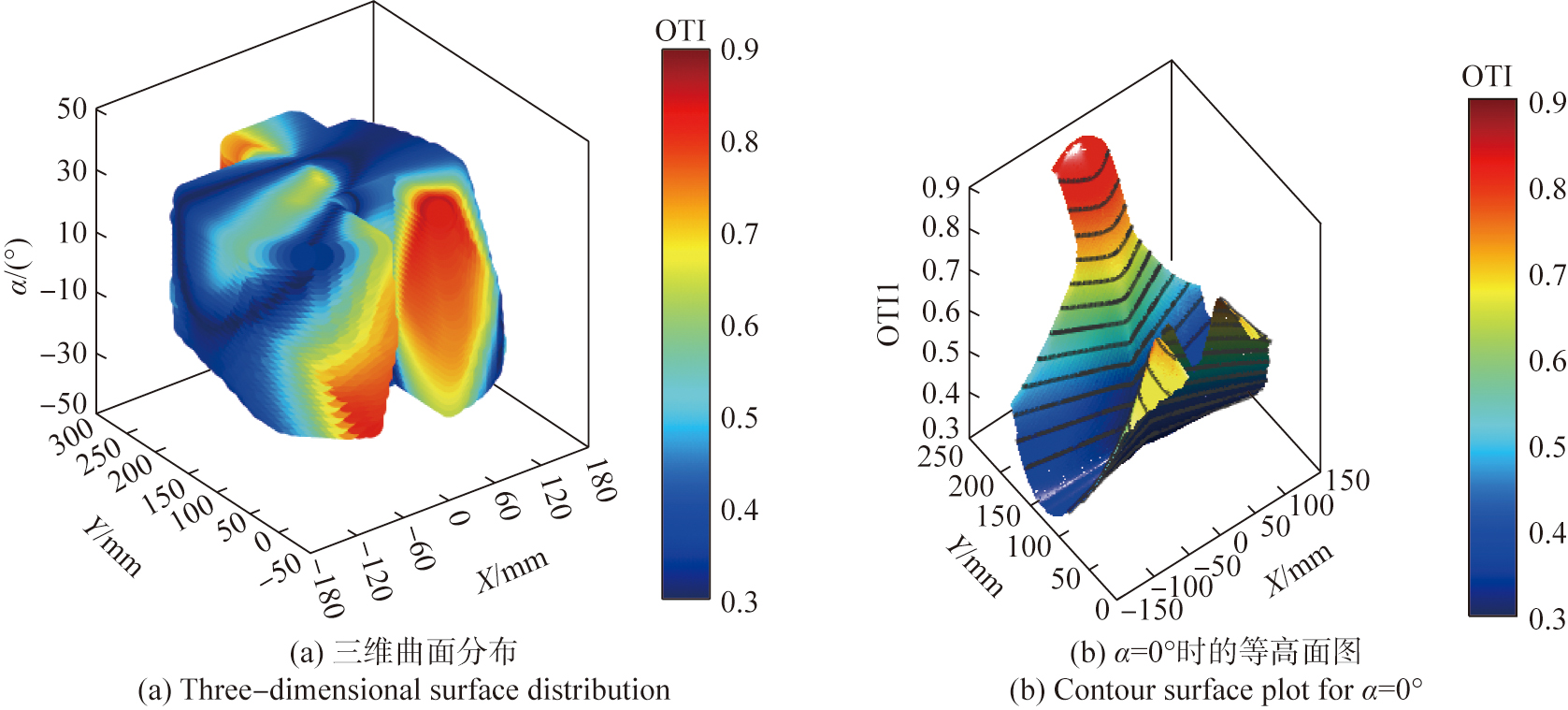
Fig.11 OTI2 distribution of Foot Ⅱ
| 设计变量 | 初值/mm | 优化范围/mm |
|---|---|---|
| a | 100 | [80,150] |
| b | 45 | [30,60] |
| c | 28 | [20,40] |
| d | 40 | [30,50] |
Table 3 Size parameters and optimization range
| 设计变量 | 初值/mm | 优化范围/mm |
|---|---|---|
| a | 100 | [80,150] |
| b | 45 | [30,60] |
| c | 28 | [20,40] |
| d | 40 | [30,50] |
| 参数 | 优化前 | 优化后 |
|---|---|---|
| a | 100 | 90 |
| b | 45 | 50 |
| c | 28 | 35 |
| d | 40 | 40 |
| κ1 | 0.5228 | 0.5931 |
| κ2 | 0.4720 | 0.4838 |
Table 4 Optimized results
| 参数 | 优化前 | 优化后 |
|---|---|---|
| a | 100 | 90 |
| b | 45 | 50 |
| c | 28 | 35 |
| d | 40 | 40 |
| κ1 | 0.5228 | 0.5931 |
| κ2 | 0.4720 | 0.4838 |
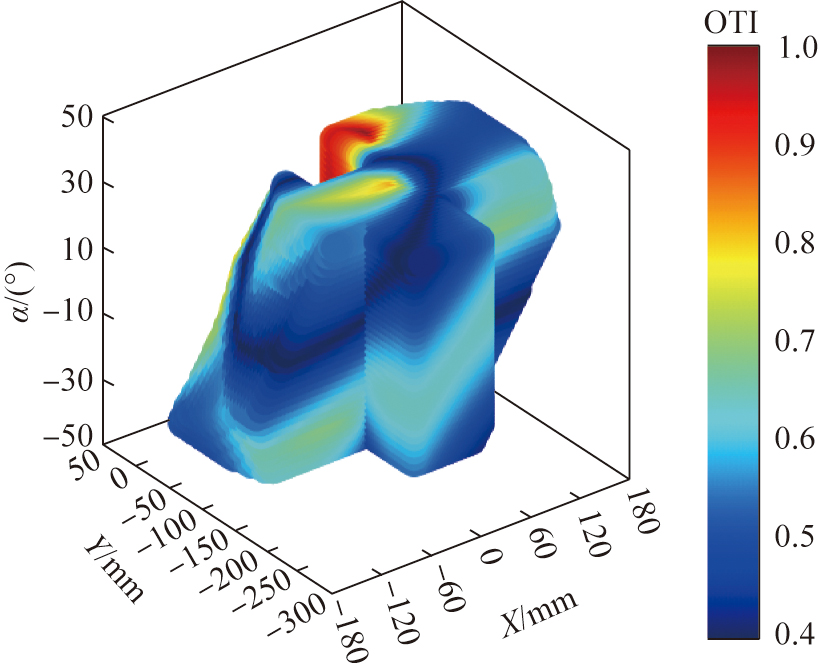
Fig.12 Optimized LTI1 distribution
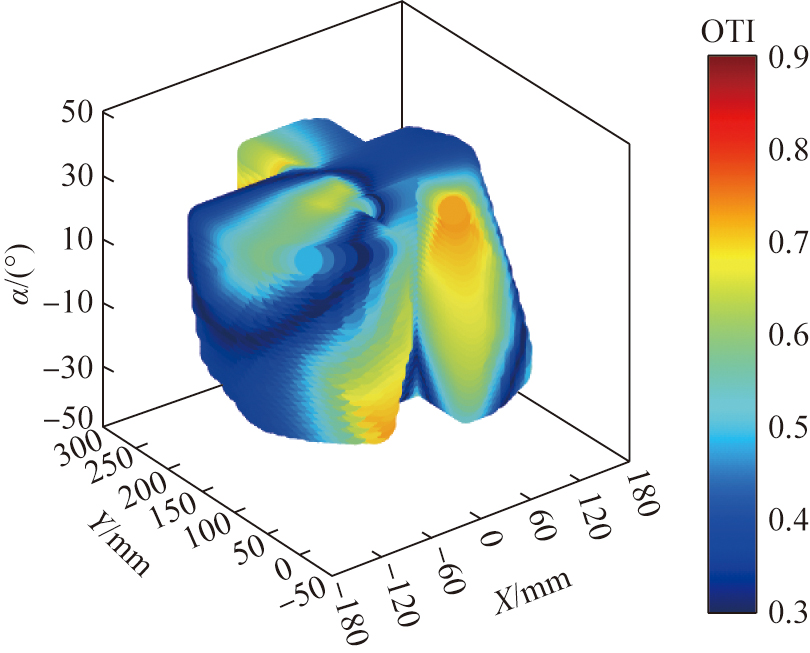
Fig.13 Optimized LTI2 distribution

Fig.14 Gait pattern for stair climbing
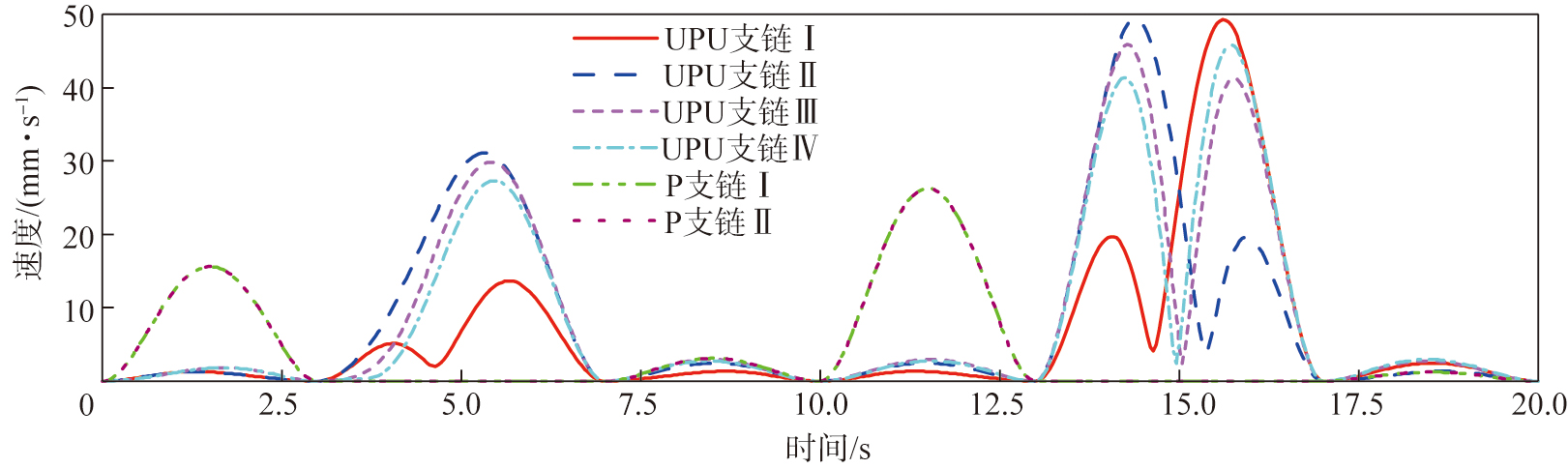
Fig.15 Velocity variation curve
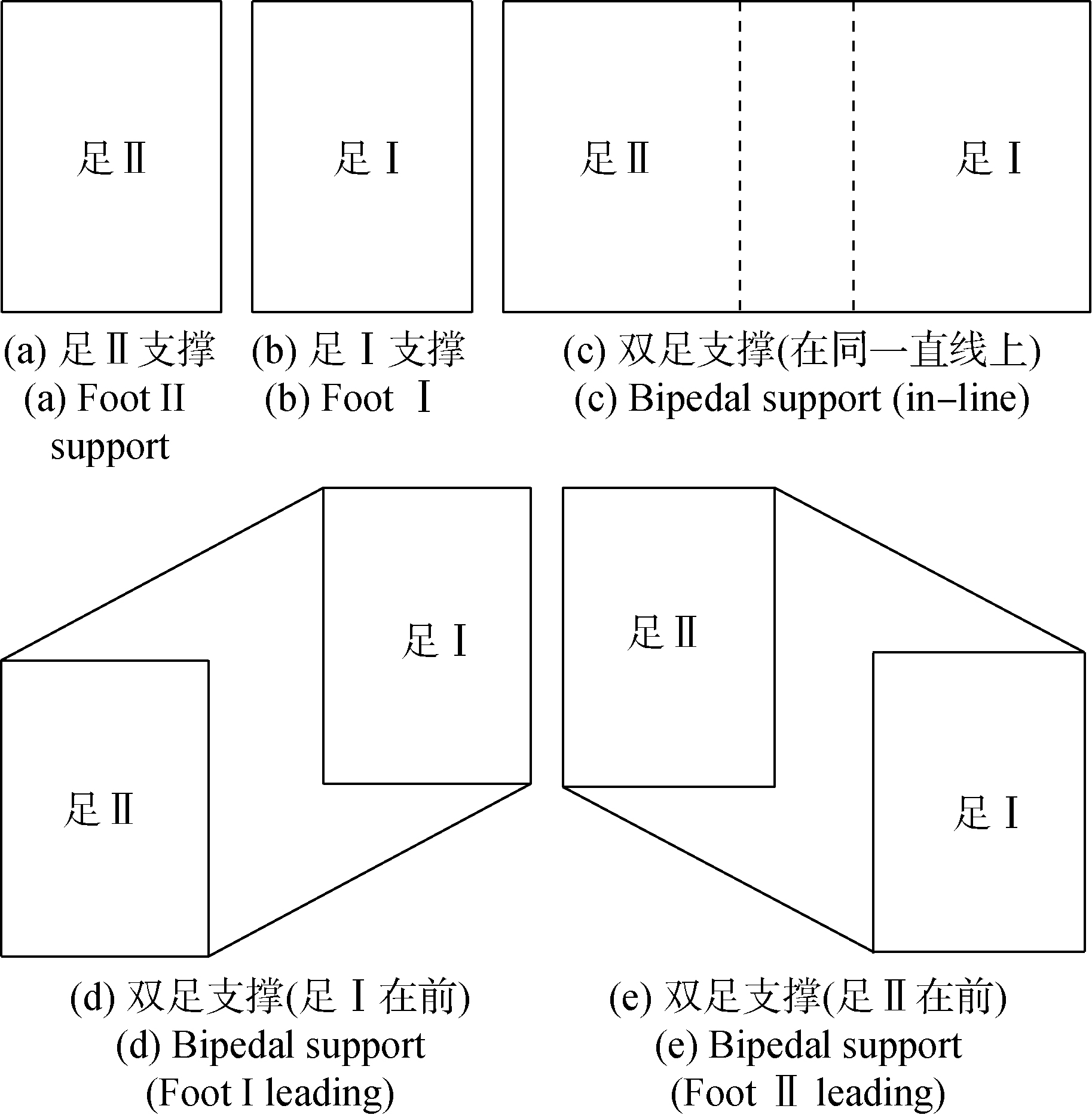
Fig.16 Support polygons during different gait phases
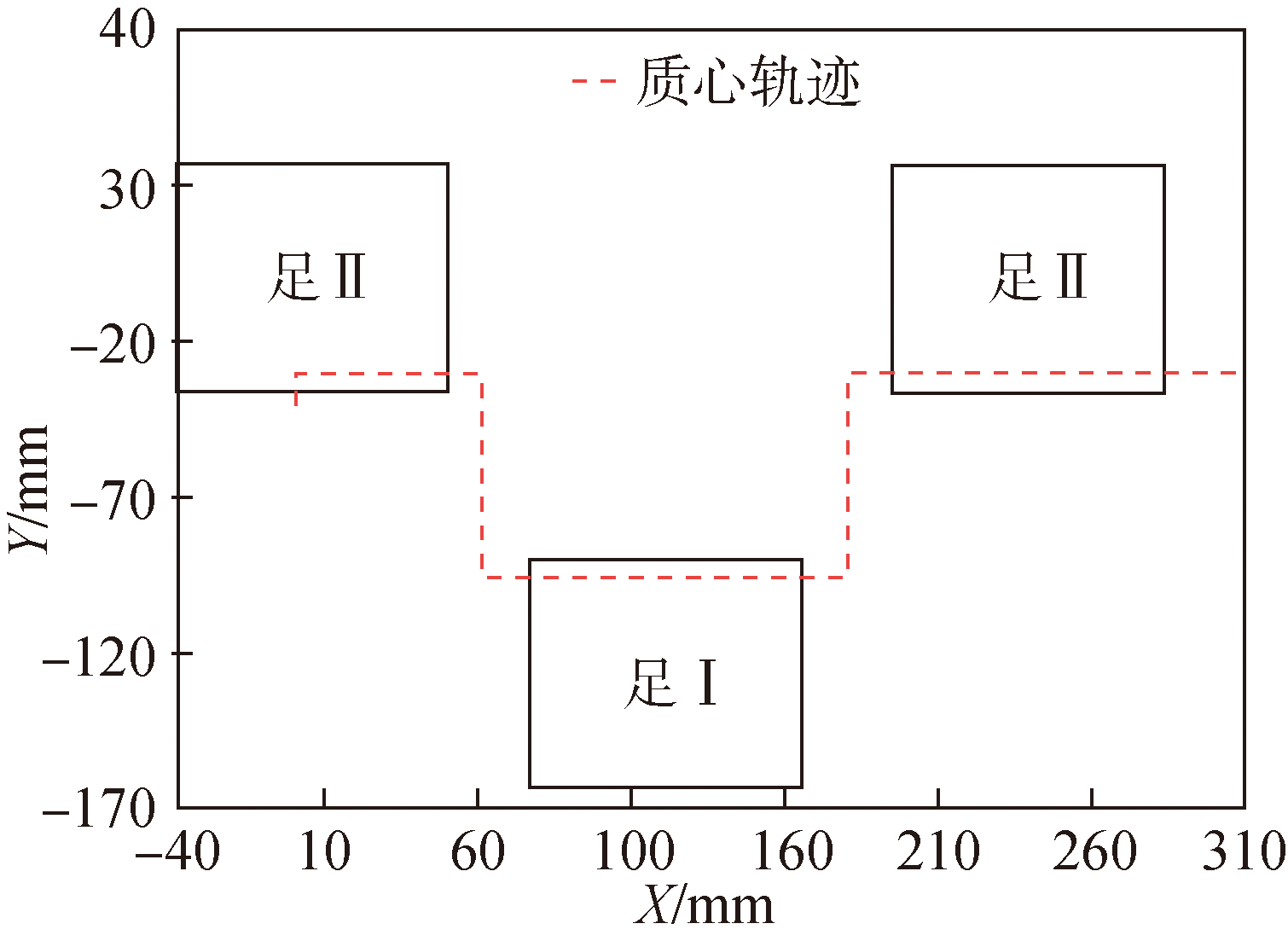
Fig.17 COM trajectory curve during stair climbing
| [1] |
尚哲, 王挺, 徐瑶, 等. 六轮摇臂移动机器人结构设计与越障动力学研究[J]. 兵工学报, 2023, 44(11):3478-3488.
doi: 10.12382/bgxb.2022.0825 |
|
doi: 10.12382/bgxb.2022.0825 |
|
| [2] |
姜祎, 王挺, 邵沛瑶, 等. 一种轮腿复合型机器人的步态研究与越障性能分析[J]. 兵工学报, 2023, 44(1):247-259.
doi: 10.12382/bgxb.2022.0823 |
|
doi: 10.12382/bgxb.2022.0823 |
|
| [3] |
罗自荣, 徐毓泽, 陈善军, 等. 2-(U+UPS)PU+UPU平动机器人腿机构设计与力速性能分析[J]. 中国机械工程, 2024, 35(12):2193-2202.
|
|
doi: 10.3969/j.issn.1004-132X.2024.12.012 |
|
| [4] |
doi: 10.20965/jrm.2007.p0272 URL |
| [5] |
|
| [6] |
doi: 10.1109/LRA.2024.3350997 URL |
| [7] |
doi: 10.1016/j.mechmachtheory.2022.105029 URL |
| [8] |
王洪波, 齐政彦, 胡正伟, 等. 并联腿机构在四足/两足可重组步行机器人中的应用[J]. 机械工程学报, 2009, 45(8):24-30.
|
|
|
|
| [9] |
王洪波, 徐桂玲, 胡星, 等. 四足并联腿步行机器人动力学[J]. 机械工程学报, 2012, 48(23):76-82.
|
|
|
|
| [10] |
潘武星, 李瑞琴. 可重构性和解耦性轮腿式机械腿构型综合方法[J]. 兵工学报, 2024, 45(8):2658-2666.
doi: 10.12382/bgxb.2023.0398 |
|
doi: 10.12382/bgxb.2023.0398 |
|
| [11] |
doi: 10.1109/ACCESS.2024.3467278 URL |
| [12] |
樊文龙. 用于长重物协同搬运的3-UPU并联式六足机器人构型设计及运动规划[D]. 太原: 中北大学, 2023.
|
|
|
|
| [13] |
doi: 10.1016/j.mechmachtheory.2024.105904 URL |
| [14] |
doi: 10.1115/1.1469549 URL |
| [15] |
黄真, 赵永生, 赵铁石. 高等空间机构学[M]. 2版. 北京: 高等教育出版社, 2014:111-152.
|
|
|
|
| [16] |
doi: 10.1016/j.mechmachtheory.2022.105015 URL |
| [17] |
doi: 10.3390/app14051757 URL |
| [18] |
刘辛军, 于靖军, 孔宪文. 机器人机构学[M]. 北京: 机械工业出版社, 2021.
|
|
|
|
| [19] |
叶伟, 谢镇涛, 李秦川. 一种可用于微创手术的并联机构运动学分析与性能优化[J]. 机械工程学报, 2020, 56(19):103-112.
doi: 10.3901/JME.2020.19.103 |
|
doi: 10.3901/JME.2020.19.103 |
|
| [20] |
陈祥, 谢福贵, 刘辛军. 并联机构中运动/力传递功率最大值的评价[J]. 机械工程学报, 2014, 50(3):1-9.
|
|
|
|
| [21] |
刘辛军, 谢福贵, 汪劲松. 并联机器人机构学基础[M]. 北京: 高等教育出版社, 2018.
|
|
|
|
| [22] |
doi: 10.1142/S0219843604000083 URL |
| [23] |
doi: 10.1142/S0219843623500305 URL |
| [1] | WANG Zhibo, GU Jinjing, QIAN Haocheng. The Influence of Active Ventilation on Propeller Wake [J]. Acta Armamentarii, 2025, 46(9): 240905-. |
| [2] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [3] | JIA Shuxiang, YU Yonggang. Numerical Simulation of the Expansion Characteristics of Plasma Jet in Gradually Expanding Liquid-filled Chamber [J]. Acta Armamentarii, 2025, 46(4): 240034-. |
| [4] | WU Haoyang, CHEN Kaixuan, XUE Xiaochun, YU Yonggang. Numerical Simulation on Unsteady Combustion of NEPE Propellant [J]. Acta Armamentarii, 2025, 46(11): 250148-. |
| [5] | DONG Heng, HUANG Fenglei, WU Haijun, DENG Ximin, LI Meng, LIU Longlong. Penetration and Perforation Mechanism of High-speed Non-circular Projectilesa: A State-of-the-Art Review [J]. Acta Armamentarii, 2024, 45(9): 2863-3887. |
| [6] | LI Xiaodong, MENG Lei, ZHOU Ping, YAN Ying. Efficient Computational Model and Analysis of Structural Stability of Multi-layered Fiber Optic Cable Package [J]. Acta Armamentarii, 2024, 45(8): 2554-2563. |
| [7] | XU Yuntao, TAN Dalin, YANG Chao, DAI Yuting, WANG Zhenxiao, ZHOU Peng. The Influences of Forebody Parameters of Flat-nosed Projectile on Trajectory Stability and Range [J]. Acta Armamentarii, 2024, 45(6): 1933-1941. |
| [8] | WANG Wei, YANG Jing, NAN Yuxiang, LI Junhui, WANG Yuchen. Design of a Neural Network Acceleration Autopilot for Spinning Projectile Based on Adaptive Disturbance Observer [J]. Acta Armamentarii, 2024, 45(11): 3841-3855. |
| [9] | LI Yaoheng, GAI Jiangtao, ZHANG Nan, CHENG Cheng, LI Cuifen, SHUAI Zhibin, DIAO Lijun. Stability Analysis and Optimization Strategy of Electric System for Electric Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(10): 3397-3414. |
| [10] | ZHANG Xuexue, XUE Zhihua, NIE Hongqi, YAN Qilong. Preparation of Energetic Burning Rate Inhibitor and Its Negative Catalytic Effect on AP Decomposition [J]. Acta Armamentarii, 2024, 45(1): 15-25. |
| [11] | CHEN Baihan, SHEN Zikai, ZOU Huihui, WANG Weiguang, WANG Kehui. Basic Evolution Characteristics of Oblique Penetration of Projectile against Hard Target [J]. Acta Armamentarii, 2023, 44(S1): 59-66. |
| [12] | CHEN Baihan, WANG Libin, ZOU Huihui, WANG Weiguang, WANG Kehui. Influence of Spin on the Penetration Effect of Projectile [J]. Acta Armamentarii, 2023, 44(S1): 117-124. |
| [13] | LI Dongyang, CHANG Sijiang, WANG Zhongyuan. Nonlinear Region of Attraction Estimation for Projectile’s Angular Motion [J]. Acta Armamentarii, 2023, 44(8): 2329-2341. |
| [14] | DU Wanshan, ZHOU Zhou, BAI Yu, ZHANG Zhilin, WANG Keilei. Study on Multibody Dynamics Modeling and Flight Dynamic Characteristics of Combined Aircraft [J]. Acta Armamentarii, 2023, 44(8): 2245-2262. |
| [15] | ZHOU Lin, NI Lei, LI Dongwei, ZHANG Xiangrong, LIU Haiqing, JIANG Tao, ZHU Yingzhong. Test Method for Anti-overload Performance of Explosives [J]. Acta Armamentarii, 2023, 44(6): 1722-1732. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||