
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 241157-.doi: 10.12382/bgxb.2024.1157
Previous Articles Next Articles
YAN Qi1, LIU Hui1,2,*( ), GAO Pu1,2, YANG Dianzhao1, JIAO Jiaxin1
), GAO Pu1,2, YANG Dianzhao1, JIAO Jiaxin1
Received:2024-12-27
Online:2025-11-27
Contact:
LIU Hui
CLC Number:
YAN Qi, LIU Hui, GAO Pu, YANG Dianzhao, JIAO Jiaxin. Multi-channel Active Vibration Control Strategy for Series-parallel Hybrid Electric Vehicle Based on Notch FxLMS Algorithm[J]. Acta Armamentarii, 2025, 46(11): 241157-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 The powertrain system of a series-parallel hybrid electric vehicle
| 模式 | 发动机 | 电机A | 电机B | CL0 | CL1 | BK |
|---|---|---|---|---|---|---|
| EVT1 | 开启 | 发电机 | 电机 | ○ | × | ○ |
| EVT2 | 开启 | 电机 | 发电机 | ○ | ○ | × |
| 机械 | 开启 | 关闭 | 关闭 | ○ | ○ | ○ |
| 纯电 | 关闭 | 关闭 | 电机 | × | × | ○ |
Table 1 The operation modes of series-parallel hybrid electric vehicle
| 模式 | 发动机 | 电机A | 电机B | CL0 | CL1 | BK |
|---|---|---|---|---|---|---|
| EVT1 | 开启 | 发电机 | 电机 | ○ | × | ○ |
| EVT2 | 开启 | 电机 | 发电机 | ○ | ○ | × |
| 机械 | 开启 | 关闭 | 关闭 | ○ | ○ | ○ |
| 纯电 | 关闭 | 关闭 | 电机 | × | × | ○ |

Fig.2 Engine torque fluctuation and frequency-domain analysis

Fig.3 Time-frequency analysis of torsional vibration response of input shaft

Fig.4 MAVC framework for series-parallel hybridelectric vehicle
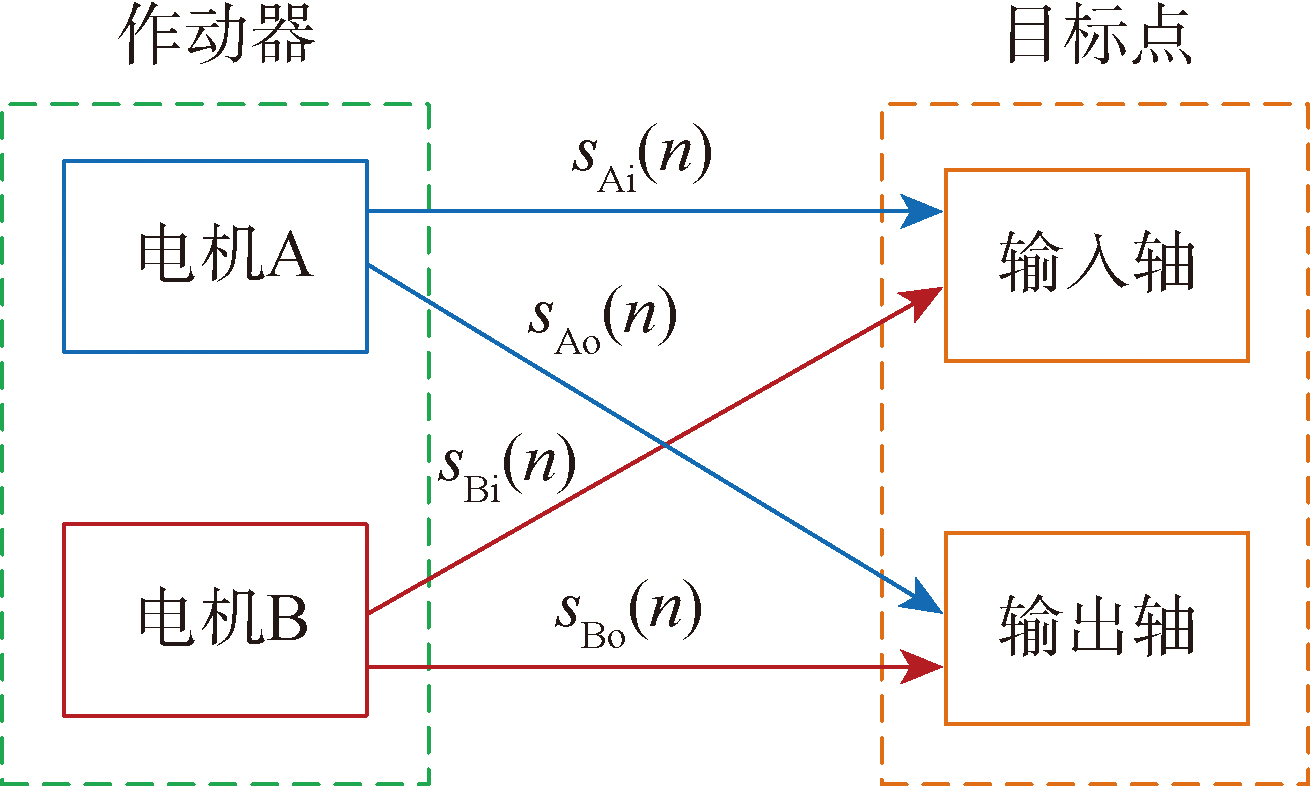
Fig.5 Schematic diagram of 4 secondary paths in MAVC
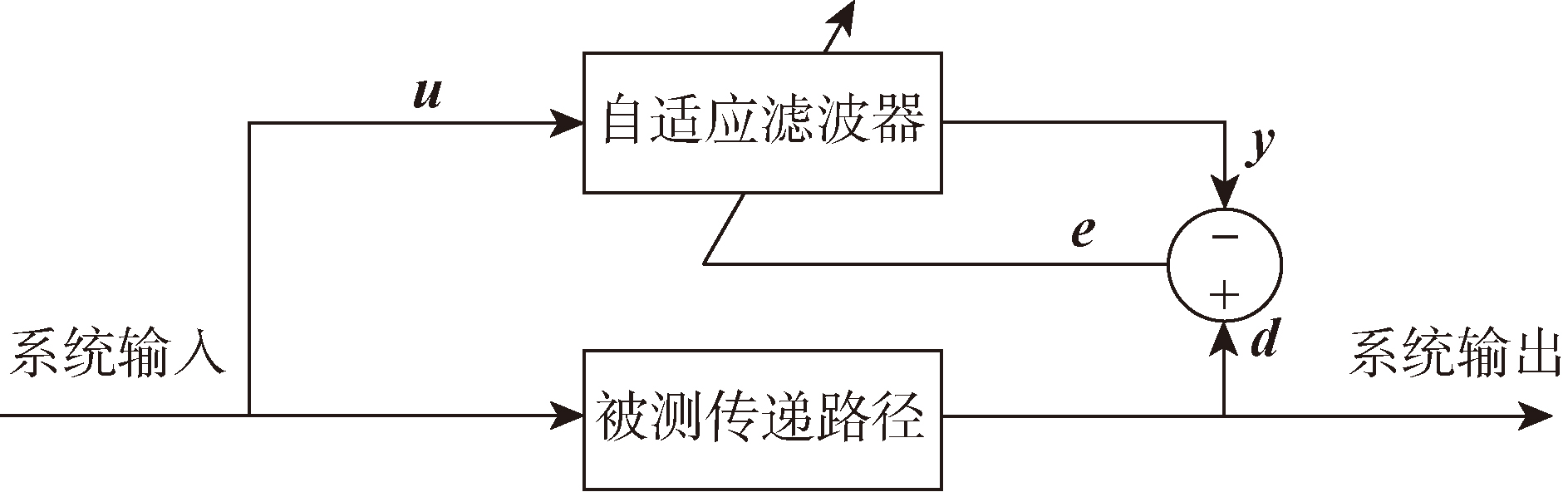
Fig.6 Secondary path adaptive identification method

Fig.7 Secondary path adaptive identification process

Fig.8 Comparison of step responses between the physical model and the identification model of the secondary path
| 参数 | 地面阻 力系数 f | 整车 质量 m/kg | 重力加 速度g/ (m·s-2) | 空气阻 力系数 CD/ (kg·m-3) | 迎风面 积A/m2 | 车轮滚 动半径 Rz/m |
|---|---|---|---|---|---|---|
| 数值 | 0.05 | 8 000 | 9.8 | 0.6 | 4.8 | 0.32 |
Table 2 The dynamics parameters of series-parallel hybrid electric vehicle
| 参数 | 地面阻 力系数 f | 整车 质量 m/kg | 重力加 速度g/ (m·s-2) | 空气阻 力系数 CD/ (kg·m-3) | 迎风面 积A/m2 | 车轮滚 动半径 Rz/m |
|---|---|---|---|---|---|---|
| 数值 | 0.05 | 8 000 | 9.8 | 0.6 | 4.8 | 0.32 |

Fig.9 Comparison of vibration responses at a vehicle speed of 30km/h (EVT1 mode) with and without MAVC
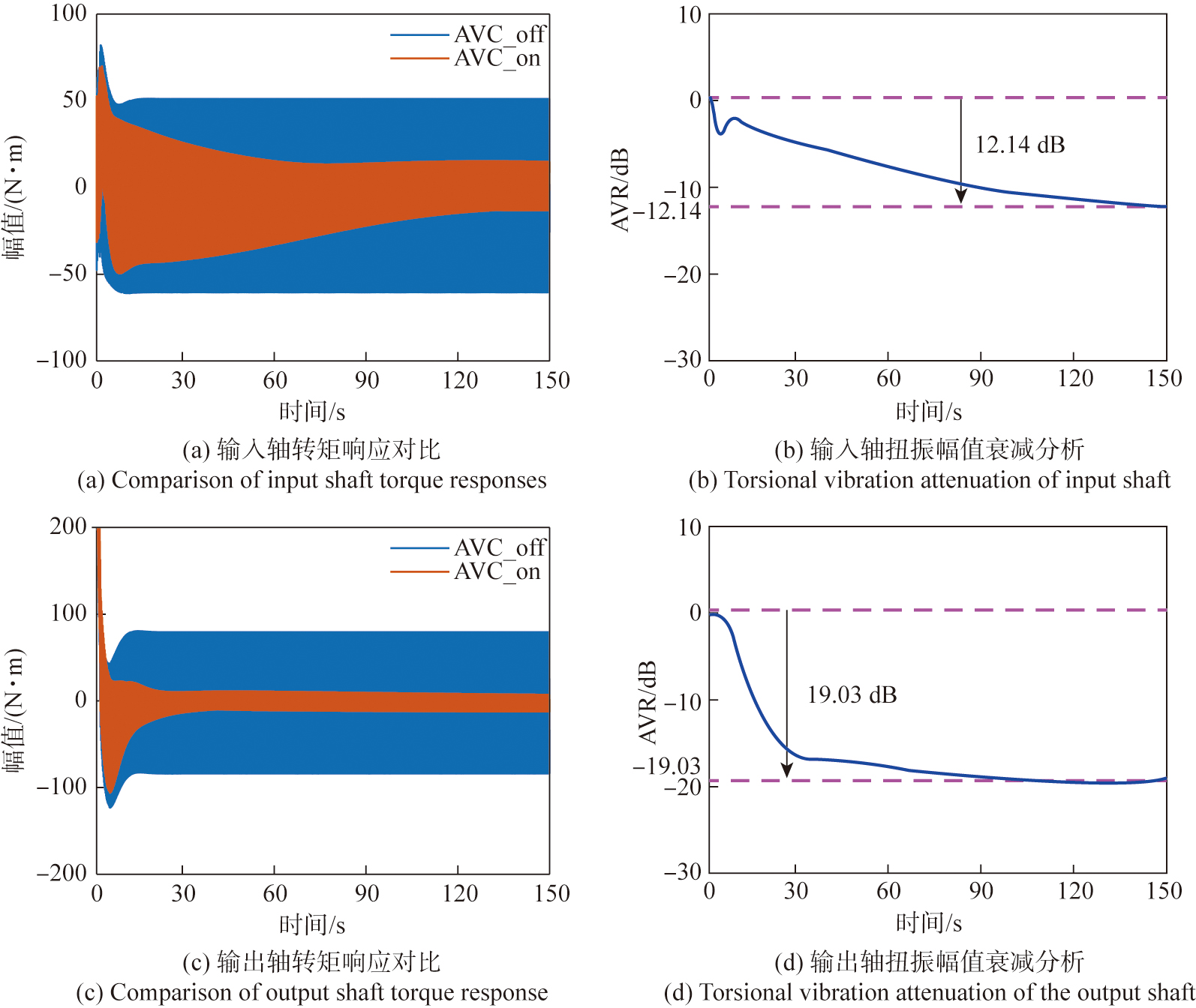
Fig.10 Comparison of vibration responses at a vehicle speed of 45km/h (EVT2 mode) with and without MAVC
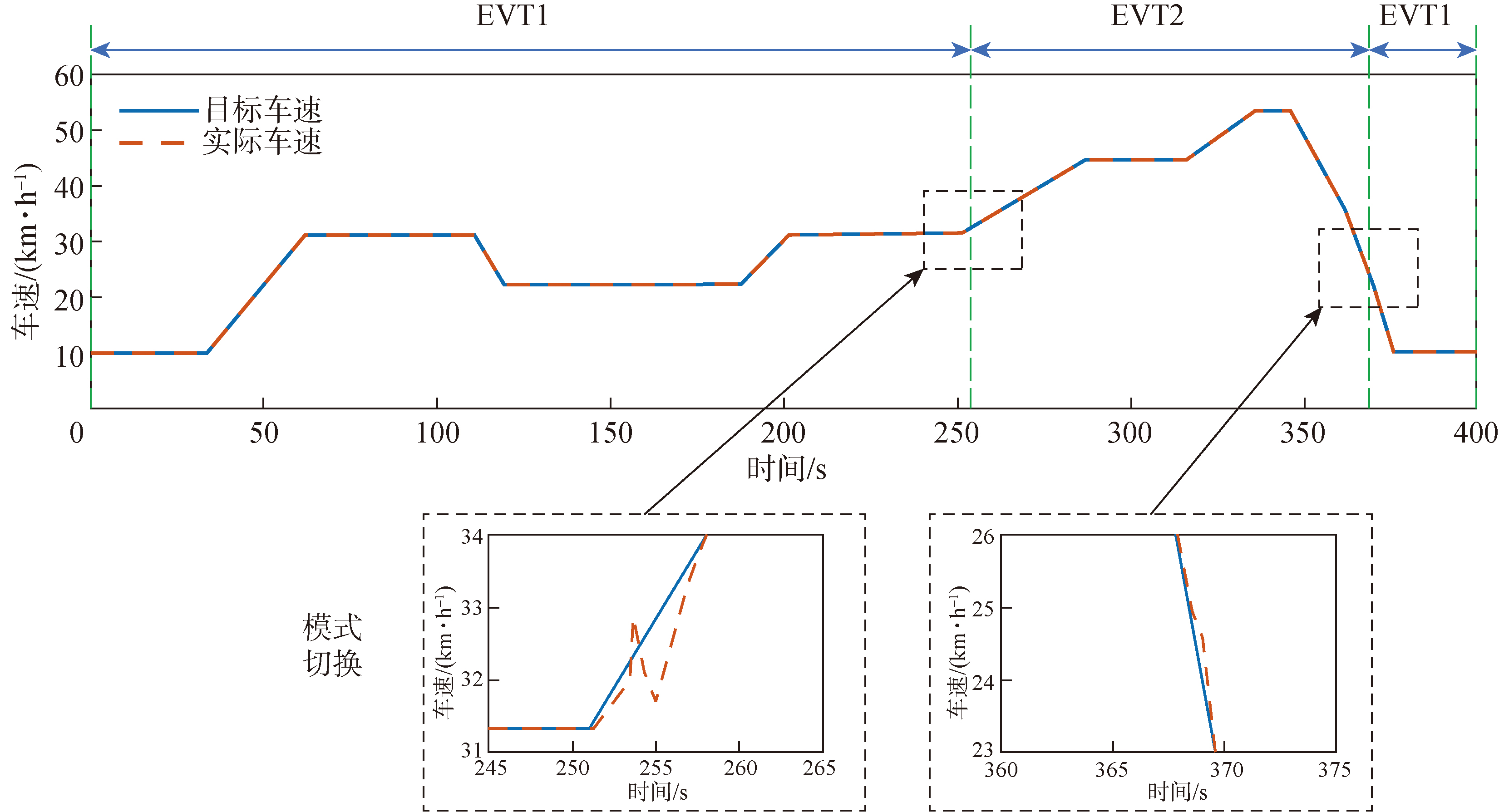
Fig.11 Target and actual vehicle speeds of a series-parallel hybrid electric vehicle under driving conditions
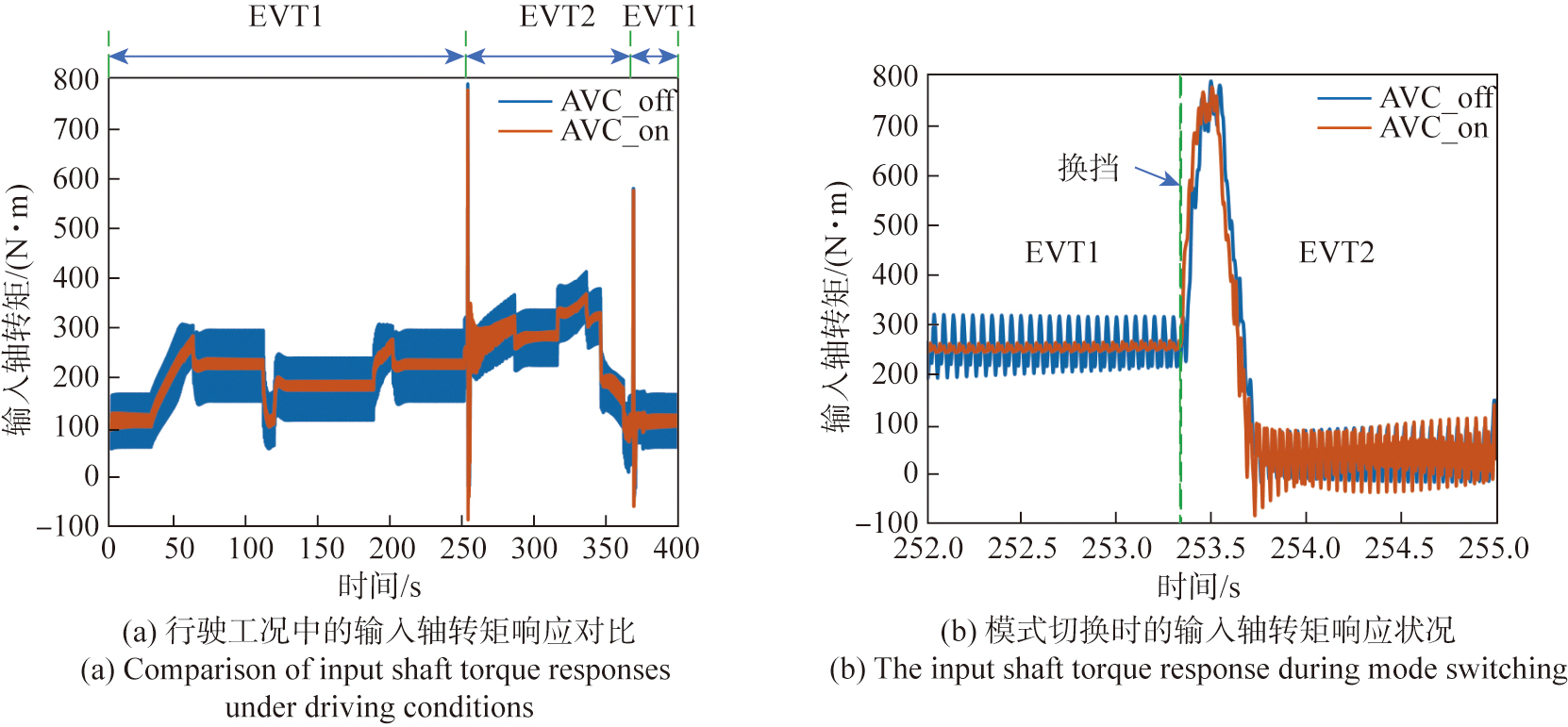
Fig.12 Comparison of input shaft torque responses under driving conditions
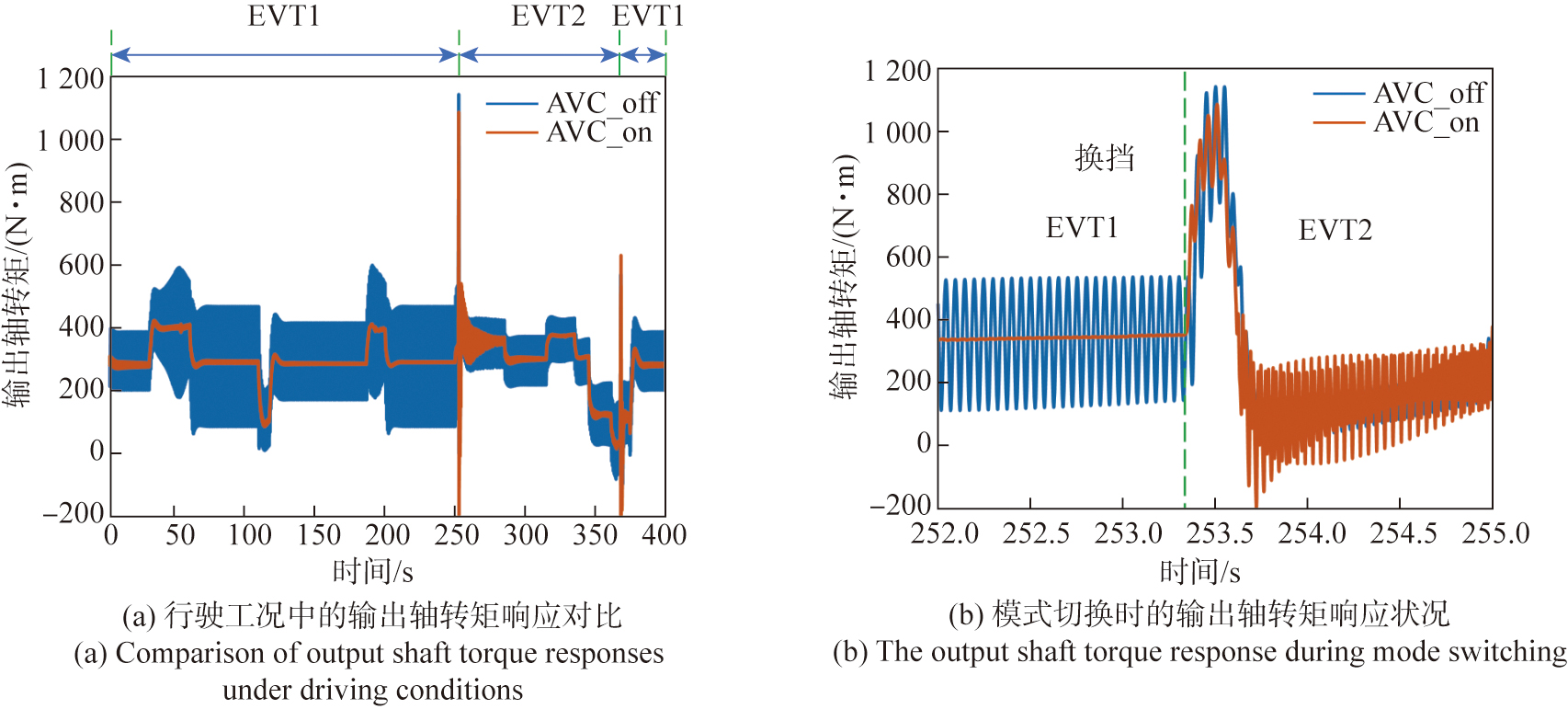
Fig.13 Comparison of output shaft torque responses under driving conditions

Fig.14 Frequency-domain analysis of input shaft and output shaft torque responses under driving conditions

Fig.15 Test bench for series-parallel HEV powertrain system
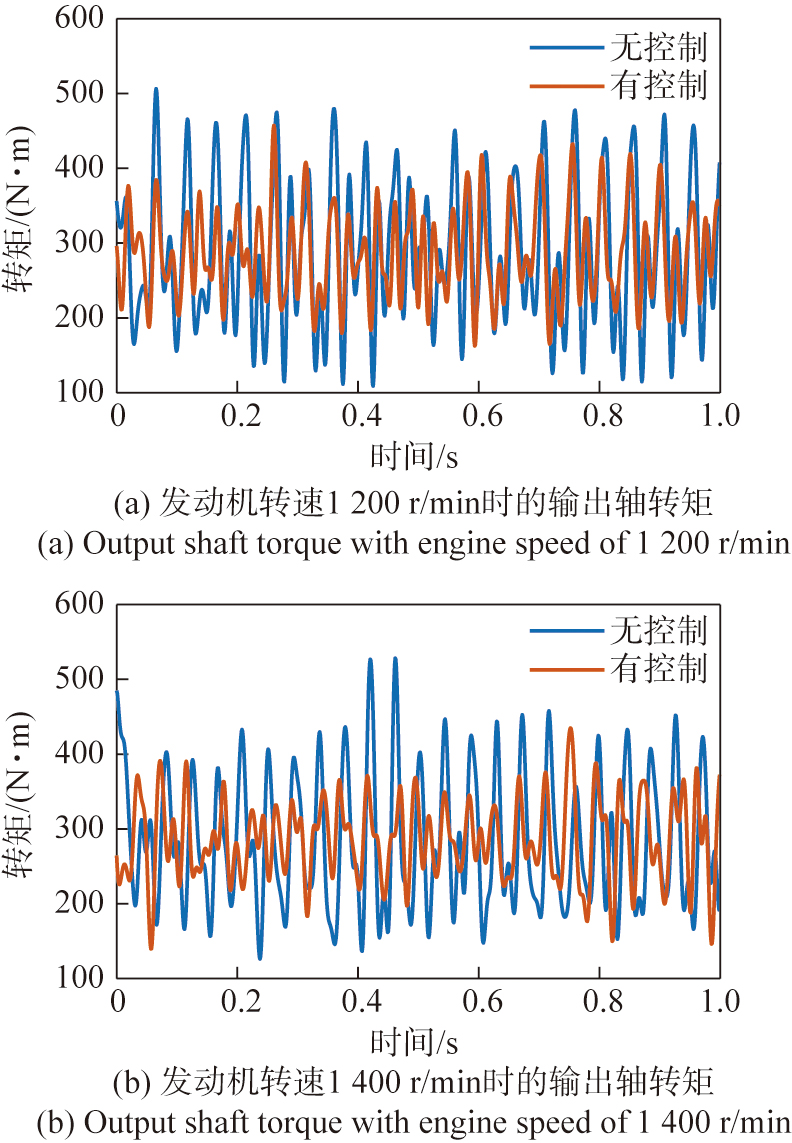
Fig.16 Time-domain analysis of output shaft torque with and without active control
| 转速/ (r·min-1) | 控制前转矩均 方差/(N·m) | 控制后转矩均 方差/(N·m) | 消减 比例/% | 波动范 围/% |
|---|---|---|---|---|
| 1200 | 874 | 344 | 60.6 | ±3.8 |
| 1400 | 763 | 261 | 65.8 | ±4.4 |
Table 3 Comparison of RMS values of output shaft torque before and after active control
| 转速/ (r·min-1) | 控制前转矩均 方差/(N·m) | 控制后转矩均 方差/(N·m) | 消减 比例/% | 波动范 围/% |
|---|---|---|---|---|
| 1200 | 874 | 344 | 60.6 | ±3.8 |
| 1400 | 763 | 261 | 65.8 | ±4.4 |
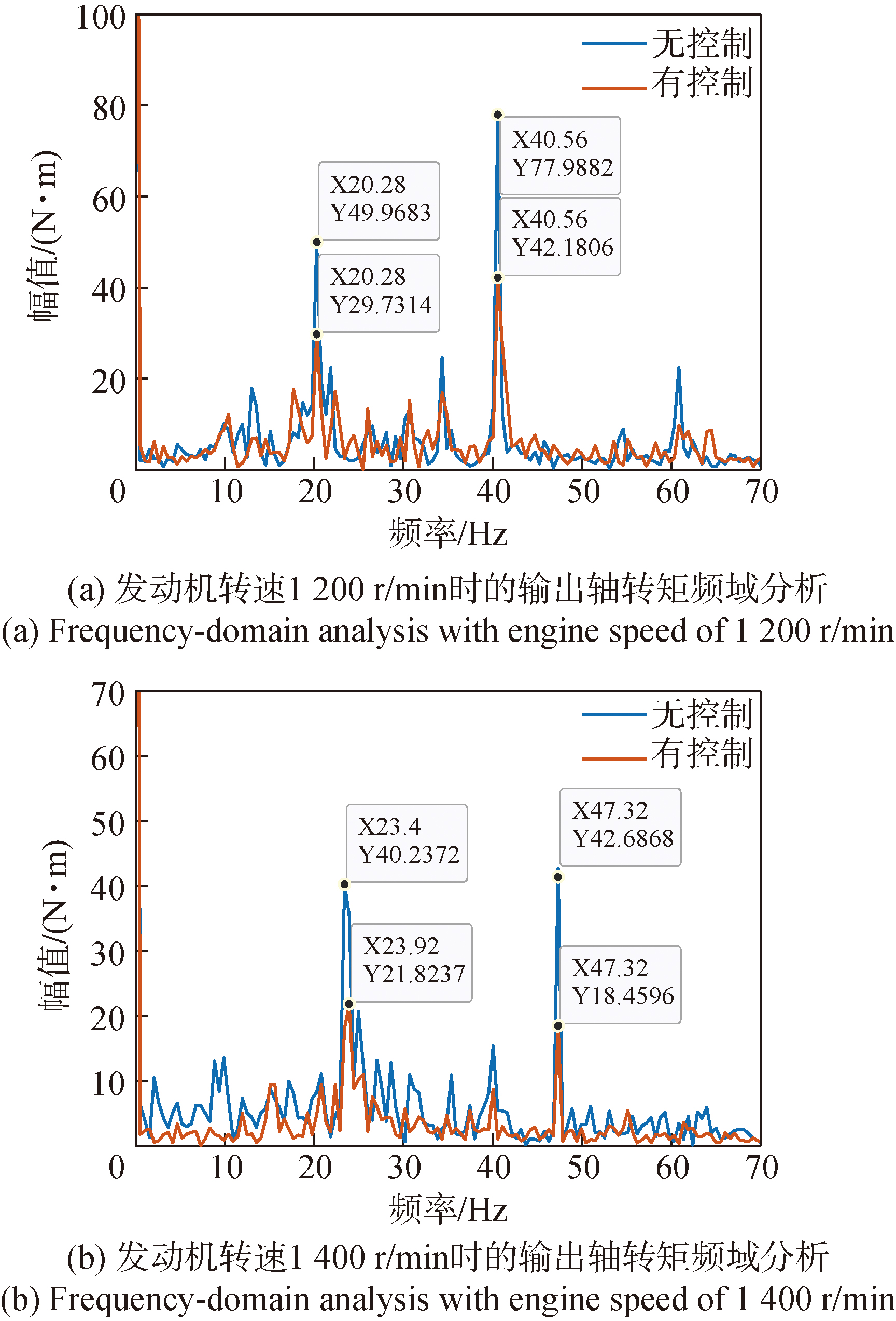
Fig.17 Frequency-domain analysis of output shaft torque with and without active control
| [1] |
doi: 10.1016/j.apenergy.2020.114553 URL |
| [2] |
|
| [3] |
doi: 10.1109/TVT.2021.3130580 URL |
| [4] |
|
| [5] |
张伟, 刘辉, 韩立金, 等. 混合动力履带车辆机电联合制动控制[J]. 兵工学报, 2022, 43(5):969-981.
doi: 10.12382/bgxb.2021.0256 |
|
doi: 10.12382/bgxb.2021.0256 |
|
| [6] |
doi: 10.1016/j.ymssp.2023.110918 URL |
| [7] |
doi: 10.1115/1.4049341 URL |
| [8] |
doi: 10.1109/TVT.25 URL |
| [9] |
doi: 10.1016/j.energy.2021.120152 URL |
| [10] |
doi: 10.3390/machines12010048 URL |
| [11] |
doi: 10.1016/j.rser.2020.109782 URL |
| [12] |
|
| [13] |
doi: 10.1109/TVT.2012.2200305 URL |
| [14] |
doi: 10.1049/cth2.v11.16 URL |
| [15] |
|
| [16] |
doi: 10.1177/10775463221075119 URL |
| [17] |
doi: 10.1016/j.jclepro.2021.126399 URL |
| [18] |
doi: 10.1016/j.ymssp.2018.10.027 URL |
| [19] |
doi: 10.1016/j.conengprac.2020.104634 URL |
| [20] |
doi: 10.1016/j.ymssp.2022.109831 URL |
| [21] |
doi: 10.1016/j.ymssp.2023.110786 URL |
| [22] |
doi: 10.1016/j.ymssp.2018.10.009 URL |
| [23] |
doi: 10.1016/j.ymssp.2021.107675 URL |
| [24] |
doi: 10.1109/TASLP.6570655 URL |
| [1] | LU Xiaoran, ZOU Yuan, ZHANG Xudong, SUN Wei, MENG Yihao, ZHANG Bin. Energy Management Strategy Optimized by Munchausen-PER-DDQN for Hybrid Tracked Vehicle [J]. Acta Armamentarii, 2025, 46(6): 240498-. |
| [2] | LI Yaoheng, GAI Jiangtao, ZHANG Nan, CHENG Cheng, LI Cuifen, SHUAI Zhibin, DIAO Lijun. Stability Analysis and Optimization Strategy of Electric System for Electric Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(10): 3397-3414. |
| [3] | TIAN Hongqing, MA Mingtao, ZHANG Bo, ZHENG Xunjia. Potential Field Exploring Tree Path Planning for Intelligent Vehicle in Off-road Environment [J]. Acta Armamentarii, 2024, 45(7): 2110-2127. |
| [4] | WU Rui, YU Huilong, DONG Haotian, XI Junqiang. Refined Dynamics Modeling and Simulation of Special Tracked Vehicles [J]. Acta Armamentarii, 2024, 45(5): 1384-1401. |
| [5] | ZHOU Xiaotian, REN Hongbin, SU Bo, QI Zhiquan, WANG Yang. Hierarchical Trajectory Planning Algorithm based on Differential Flatness [J]. Acta Armamentarii, 2023, 44(2): 394-405. |
| [6] | LIU Longlong, CHEN Huiyan, LIU Hai’ou, GUAN Haijie, LU Jiaxing. Path Replanning of Multi-speed Unmanned Tracked Platforms Based on Topological Road Network [J]. Acta Armamentarii, 2023, 44(1): 279-289. |
| [7] | XU Haoxuan, MA Xiaojun, LIU Chunguang. Large-Signal Stability of On-board DC Microgrids for Hybrid Electric Armored Vehicles [J]. Acta Armamentarii, 2023, 44(1): 108-116. |
| [8] | TAN Yingqi, XU Jingyi, XIONG Guangming, LI Zirui, CHEN Huiyan. Energy Management Optimization for Hybrid Electric Unmanned Tracked Vehicles Based on Path Planning UsingCNN-LSTM Prediction [J]. Acta Armamentarii, 2022, 43(11): 2738-2748. |
| [9] | MA Guangyuan, CHEN Huiyan. Engine Control Technology of Unmanned Track Platforms [J]. Acta Armamentarii, 2022, 43(11): 2717-2726. |
| [10] | WEI Lianzhen, GONG Jianwei, CHEN Huiyan, LI Zirui, GONG Cheng. Tracking and Aiming Adaptive Control for Unmanned Combat Ground Vehicle on the Move Based on Reinforcement LearningCompensation [J]. Acta Armamentarii, 2022, 43(8): 1947-1955. |
| [11] | WANG Boyang, GUAN Haijie, GONG Jianwei, CHEN Huiyan, ZHAO Huijing. Unified Motion Planning Method for Heterogeneous Tracked Vehicles [J]. Acta Armamentarii, 2022, 43(2): 241-251. |
| [12] | XU Baorong, WANG Tao, LIANG Zi. Generating Method and Process of Load Spectra for Tracked Vehicles Based on Prediction of Manipulating Action [J]. Acta Armamentarii, 2022, 43(2): 252-259. |
| [13] | SUN Xiaowang, ZHANG Jincheng, PENG Bing, ZHANG Jinkun, WANG Xianhui. Design and Optimization of Occupant Lower Limb Protection Device against Explosion Shock below Military Vehicle [J]. Acta Armamentarii, 2021, 42(12): 2555-2564. |
| [14] | MA Xiaojun, XU Haoxuan, LIU Chunguang. Coordinated Control Strategy of Generator Sets of Series Hybrid Electric Vehicles [J]. Acta Armamentarii, 2021, 42(10): 2075-2081. |
| [15] | LIAO Zili, SHU Xin, GAO Qiang, LI Jiaqi. Double Channel Compensation Control of Bus Voltage for Armored Vehicle with Electric Transmission [J]. Acta Armamentarii, 2021, 42(10): 2082-2091. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||