
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250134-.doi: 10.12382/bgxb.2025.0134
Previous Articles Next Articles
LI Hailiang1,2, LI Zonggang1,2,*( ), NING Xiaogang1,2, DU Yajiang1,2
), NING Xiaogang1,2, DU Yajiang1,2
Received:2025-02-28
Online:2025-11-27
Contact:
LI Zonggang
CLC Number:
LI Hailiang, LI Zonggang, NING Xiaogang, DU Yajiang. A Mobile Robot Path Planning Algorithm Based on Ant Colony Optimization Guide Deep Q-Networks[J]. Acta Armamentarii, 2025, 46(11): 250134-.
Add to citation manager EndNote|Ris|BibTeX
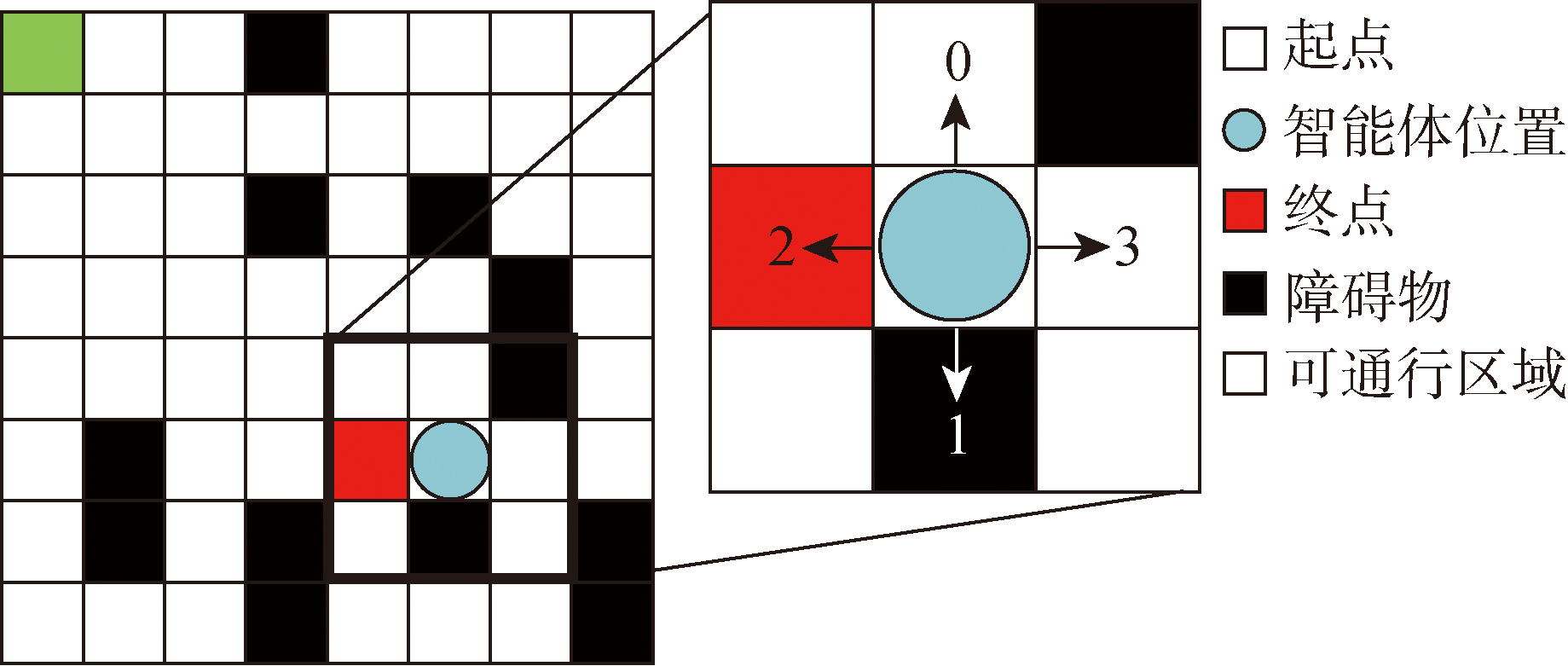
Fig.1 Grid map
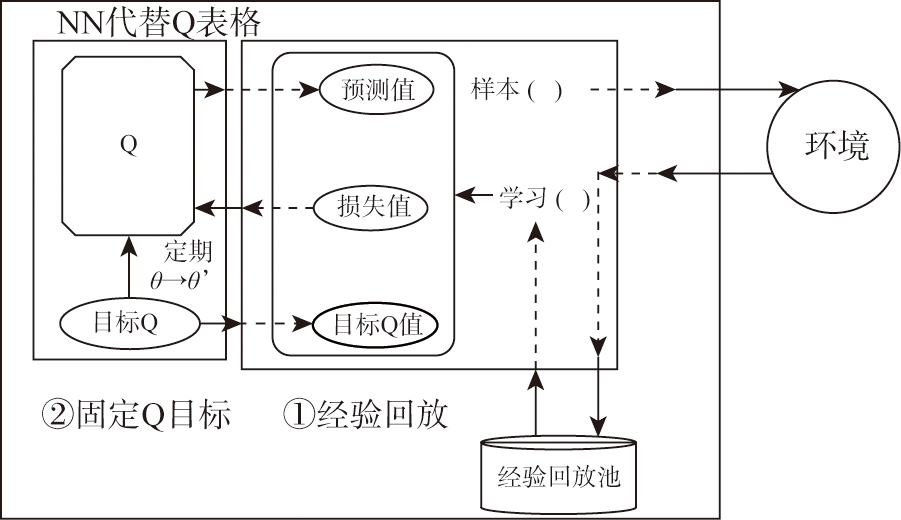
Fig.2 The architecture of the DQN
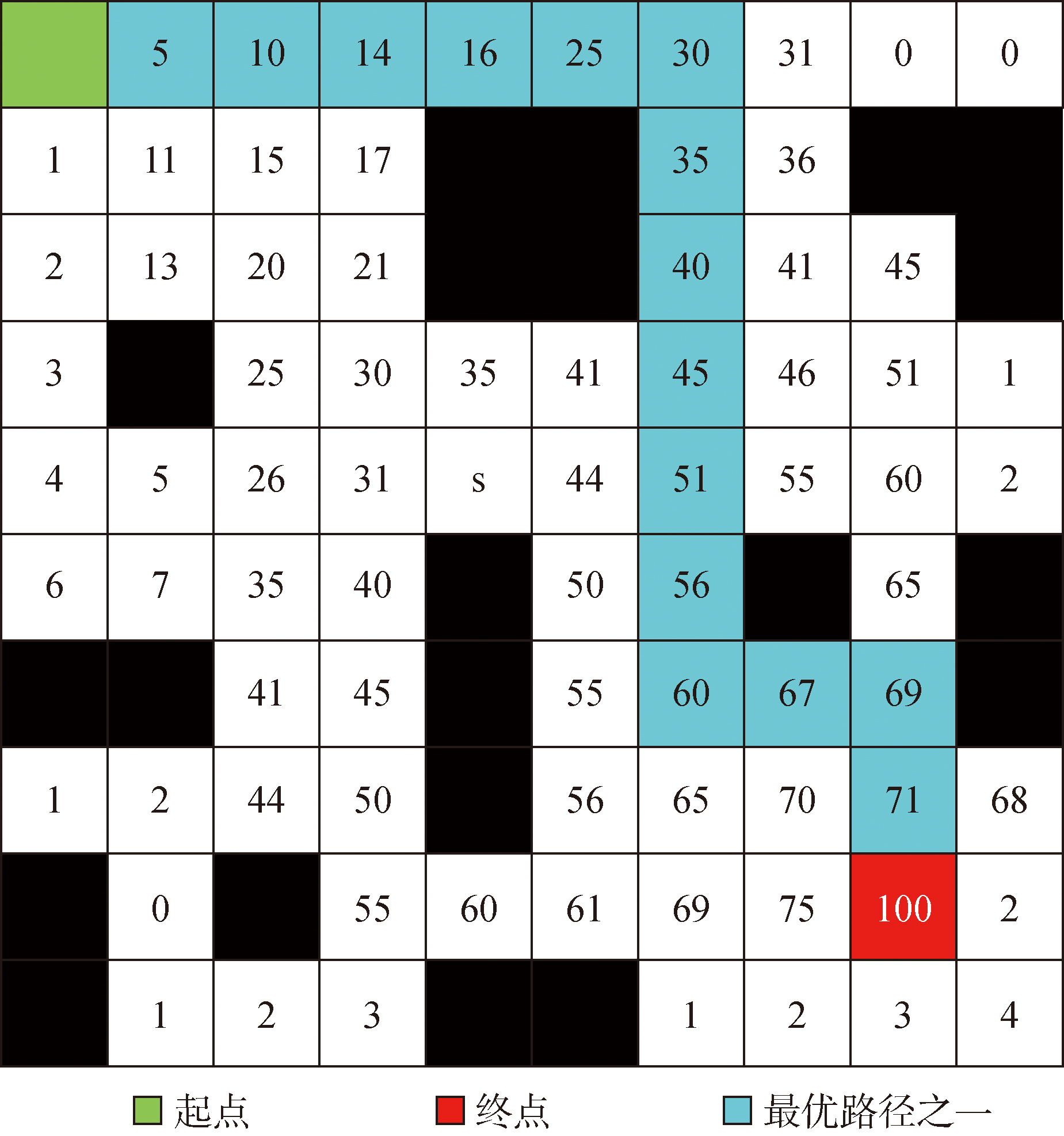
Fig.3 The pheromone model of the ACO algorithm
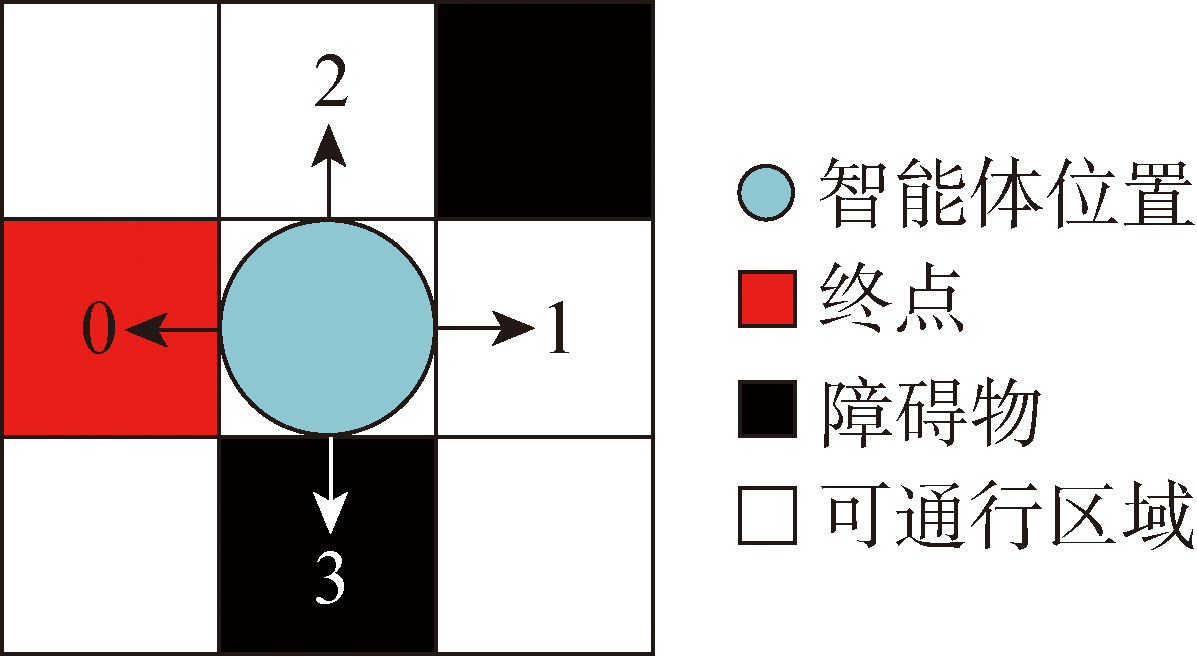
Fig.4 Action selection
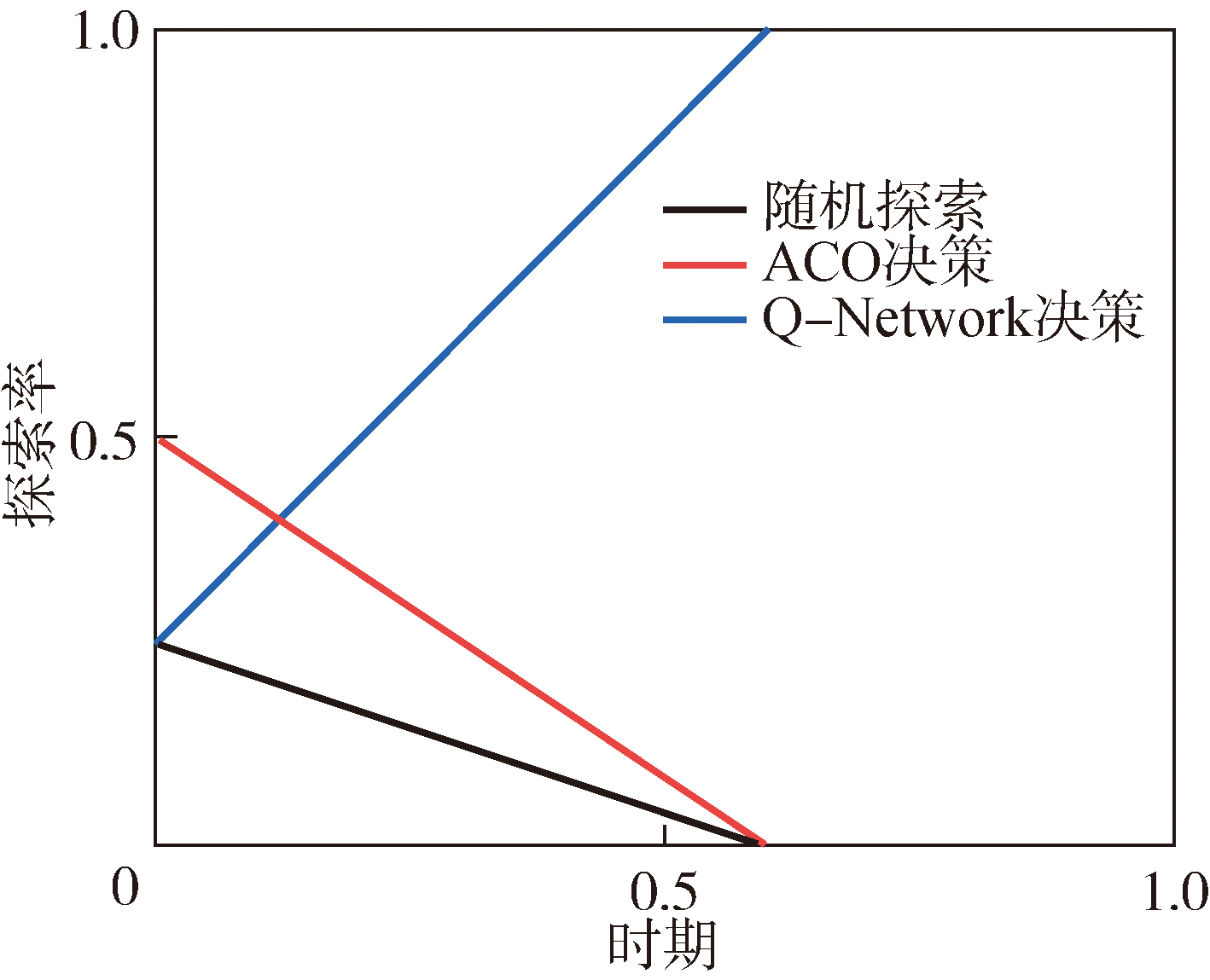
Fig.5 The variation process of the exploration rate
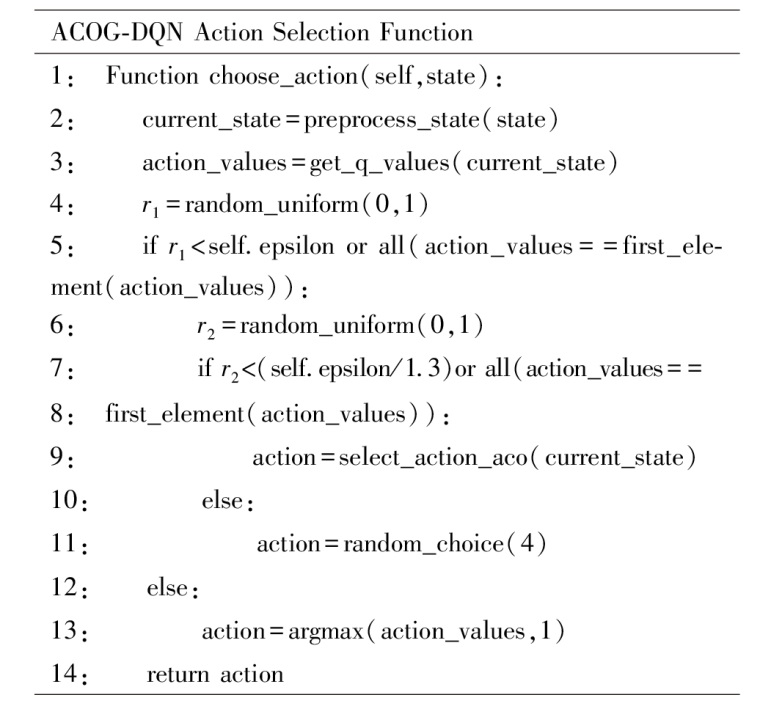
Fig.6 Pseudocode of the Action Selection Function

Fig.7 The architecture of the ACOG-DQN algorithm
| 超参数名称 | 数值 |
|---|---|
| 经验池 | 100000 |
| 折扣因子 | 0.9 |
| ε衰减系数 | 0.9998 |
| 最初ε值 | 0.8 |
| 最小ε值 | 0 |
| 初始样本数量 | 256 |
| 网络更新频率 | 200 |
| 学习率 | 0.1 |
| 经验筛选比例 | 1/3 |
Table 1 Hyperparameter settings
| 超参数名称 | 数值 |
|---|---|
| 经验池 | 100000 |
| 折扣因子 | 0.9 |
| ε衰减系数 | 0.9998 |
| 最初ε值 | 0.8 |
| 最小ε值 | 0 |
| 初始样本数量 | 256 |
| 网络更新频率 | 200 |
| 学习率 | 0.1 |
| 经验筛选比例 | 1/3 |

Fig.8 Path comparison in a small-scale environment of different algorithms

Fig.9 Path comparison in a big-scale environment of different algorithms

Fig.10 Path comparison in a special corridor terrain of different algorithms
| 算法 | 环境类型 | ||
|---|---|---|---|
| 8×8 | 16×16 | 16×16回廊 | |
| DQN | 10 | 19 | 未收敛 |
| ACOG-DQN | 10 | 15 | 25 |
| AG-DQN | 10 | 17 | 27 |
| APF-DQN | 10 | 17 | 29 |
Table 2 Comparison of path lengths in different algorithms
| 算法 | 环境类型 | ||
|---|---|---|---|
| 8×8 | 16×16 | 16×16回廊 | |
| DQN | 10 | 19 | 未收敛 |
| ACOG-DQN | 10 | 15 | 25 |
| AG-DQN | 10 | 17 | 27 |
| APF-DQN | 10 | 17 | 29 |
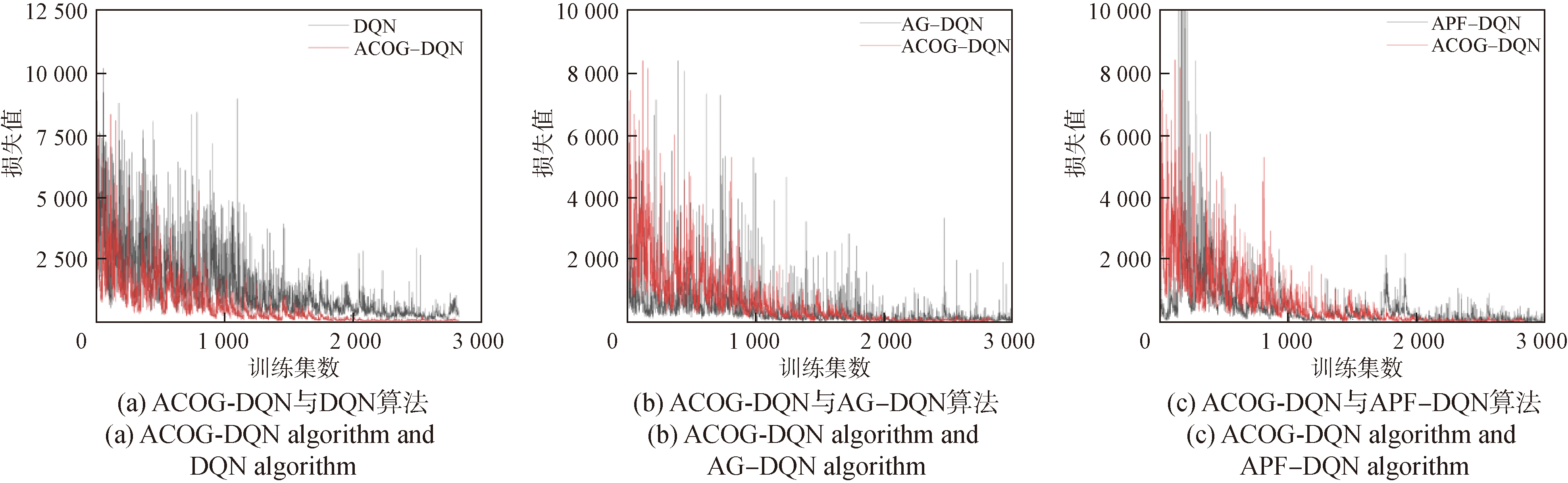
Fig.11 Comparison chart of loss value changes during training of the ACOG-DQN algorithm and three other algorithms in small-scale static map
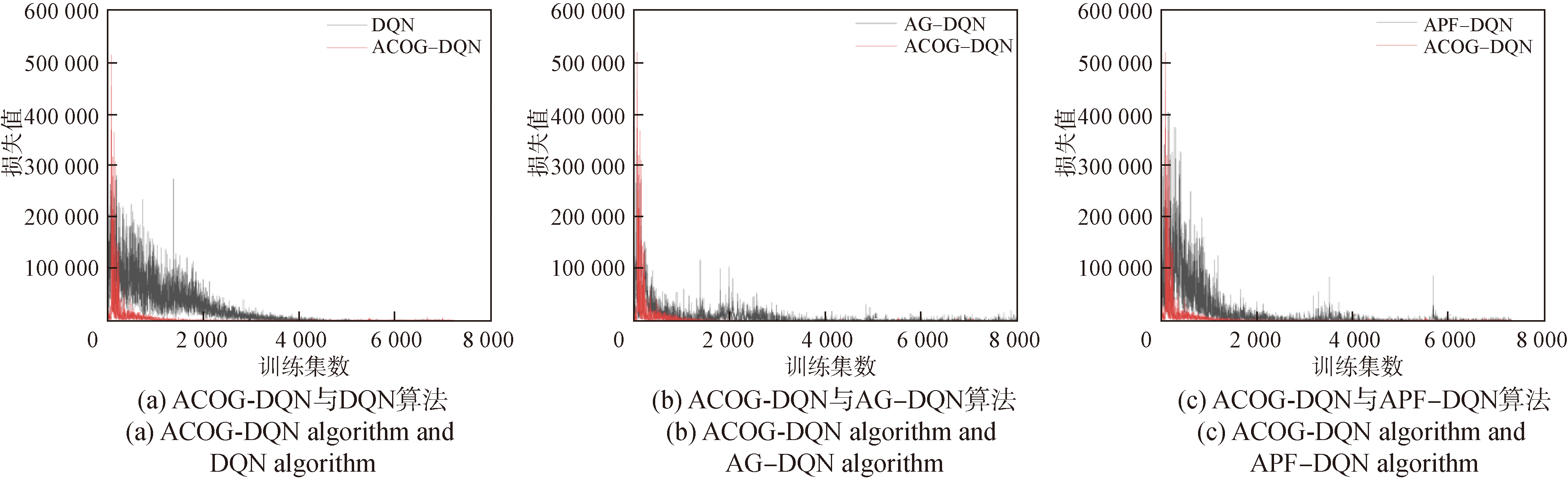
Fig.12 Comparison chart of loss value changes during training of the ACOG-DQN algorithm and three other algorithms in small-scale dynamic map

Fig.13 Comparison chart of loss value changes during training of the ACOG-DQN algorithm and three other algorithms in big-scale static map

Fig.14 Comparison chart of loss value changes during training of the ACOG-DQN algorithm and three other algorithms in big-scale dynamic map
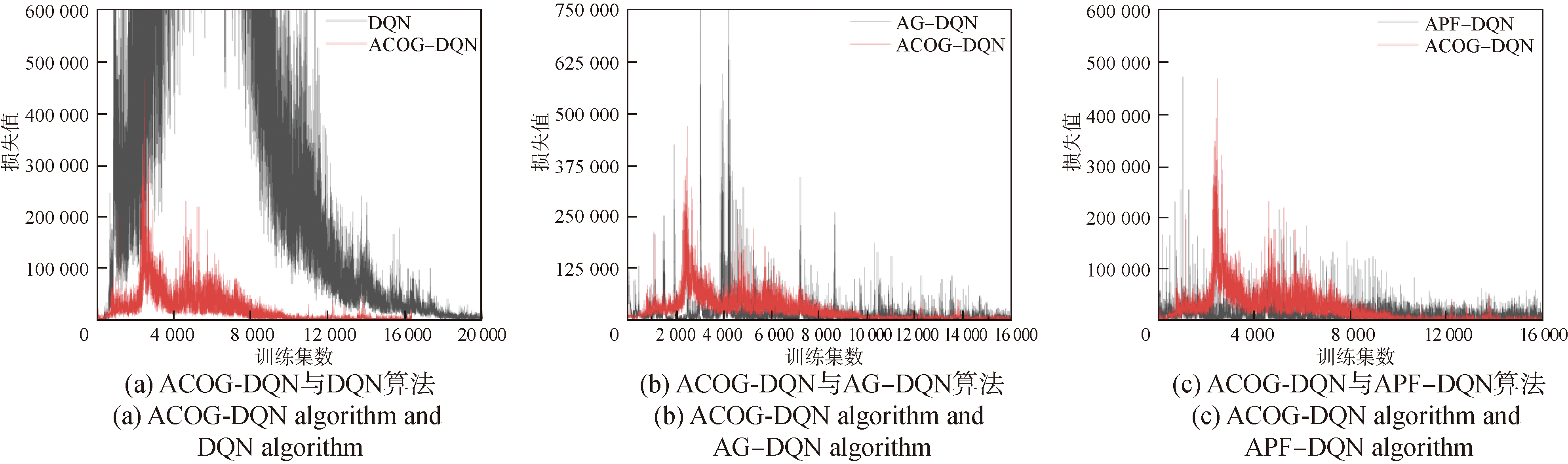
Fig.15 Comparison chart of loss value changes during training of the ACOG-DQN algorithm and three other algorithms in specialized corridor map
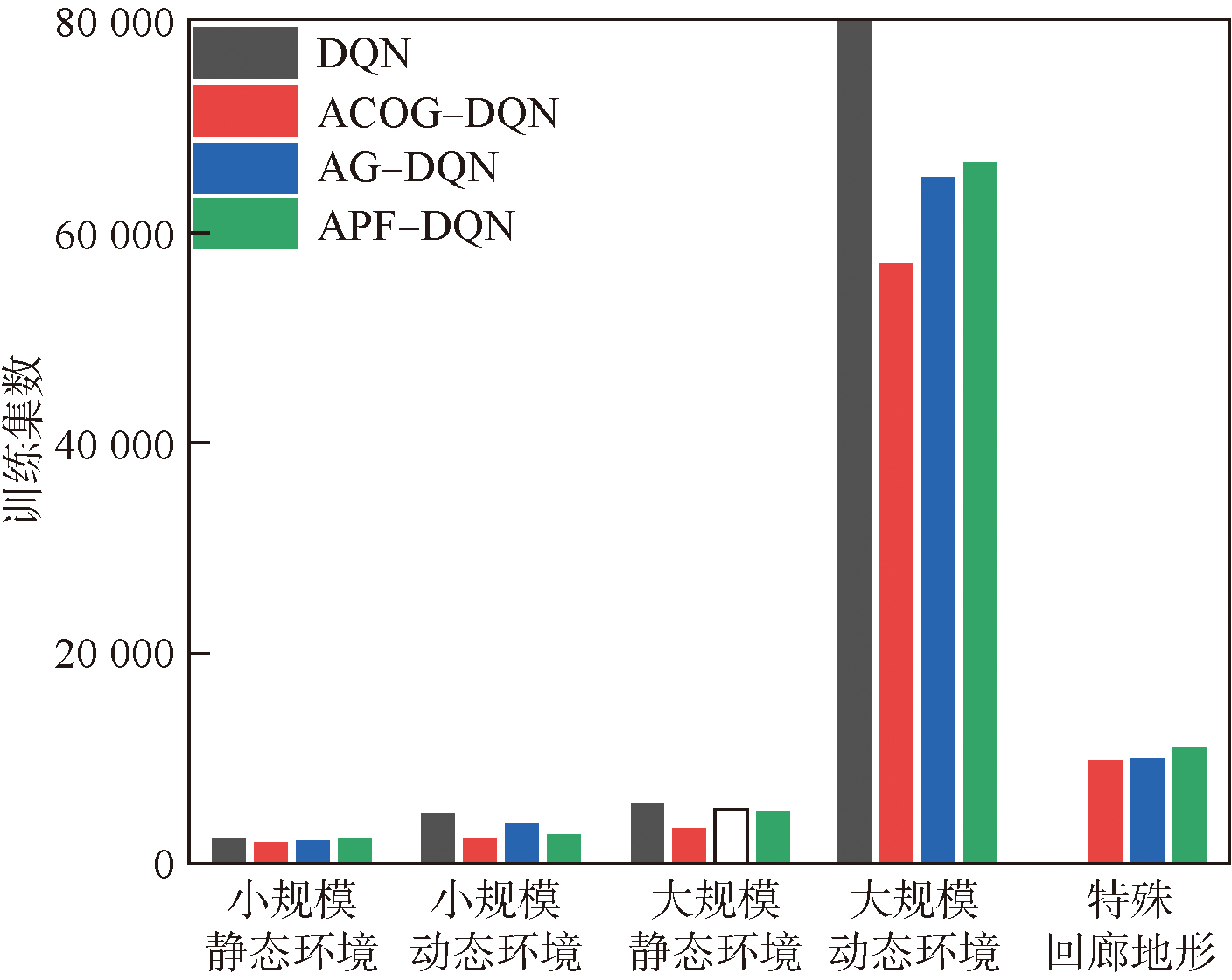
Fig.16 Comparison of the convergence speeds of four algorithms in different environment maps
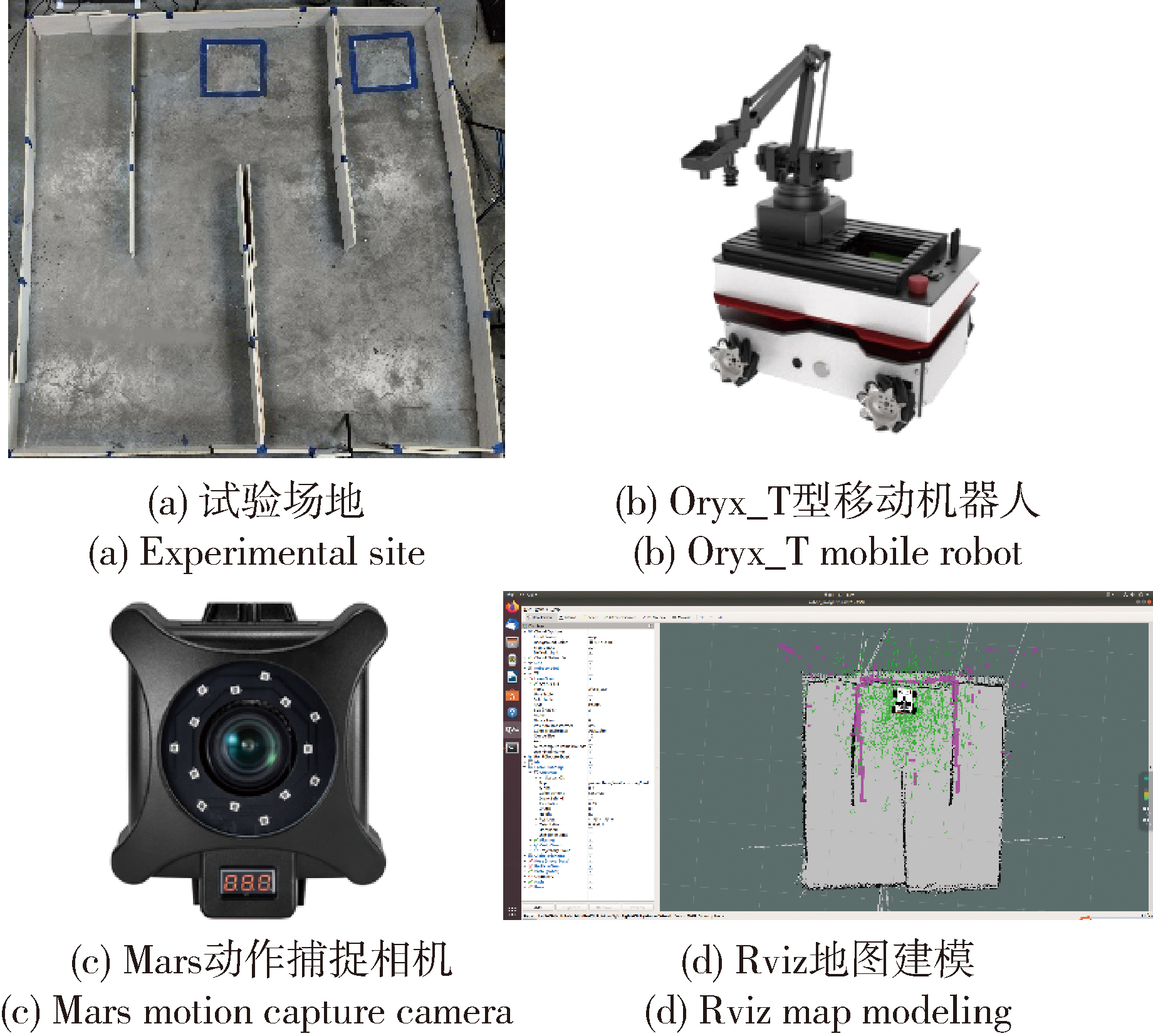
Fig.17 Hardware and software conditions
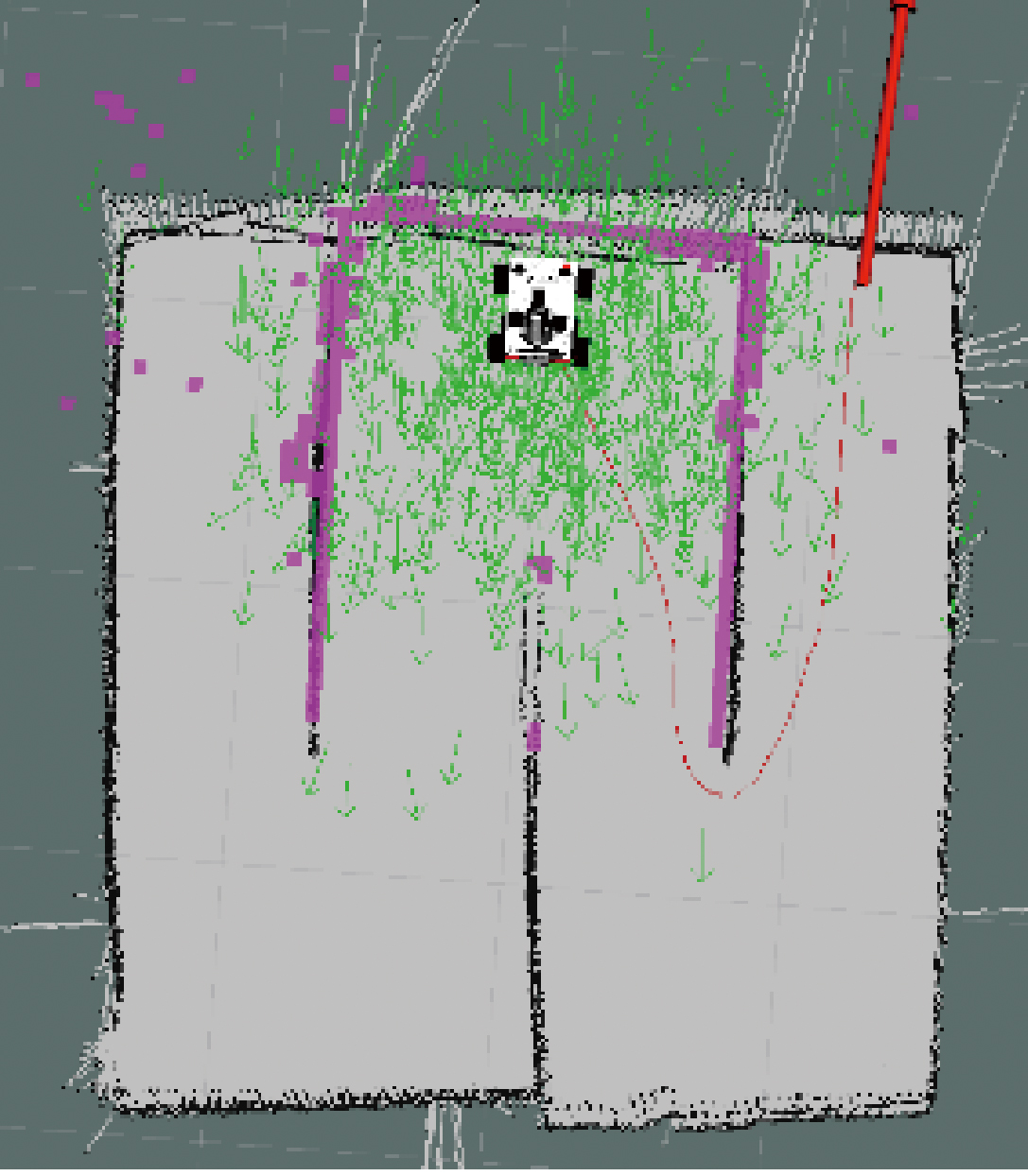
Fig.18 Presents the outcomes of global path planning within rviz

Fig.19 The keyframe fusion map of the robot movement process
| [1] |
doi: 10.1016/j.eswa.2023.120254 URL |
| [2] |
doi: 10.1016/j.eswa.2024.123571 URL |
| [3] |
doi: 10.1145/359156.359164 URL |
| [4] |
|
| [5] |
栾添添, 王皓, 孙明晓, 等. 基于动态变采样区域RRT的无人车路径规划[J]. 控制与决策, 2023, 38(6):1721-1729.
|
|
|
|
| [6] |
赵鹏程, 宋保维, 毛昭勇, 等. 基于改进的复合自适应遗传算法的UUV水下回收路径规划[J]. 兵工学报, 2022, 43(10):2598-2608.
|
|
doi: 10.12382/bgxb.2021.0474 |
|
| [7] |
doi: 10.1016/j.asoc.2021.107439 URL |
| [8] |
潘云伟, 李敏, 曾祥光, 等. 基于人工势场和改进强化学习的自主式水下潜航器避障和航迹规划[J]. 兵工学报, 2025, 46(4):72-83.
|
|
|
|
| [9] |
doi: 10.3390/rs15123077 URL |
| [10] |
|
| [11] |
杨尚志, 张刚, 陈跃华, 等. 基于改进分层DQN算法的智能体路径规划[J]. 计算机应用与软件, 2024, 41(5):226-232,239.
|
|
|
|
| [12] |
倪培龙, 毛鹏军, 王宁, 等. 基于改进A-DDQN算法的机器人路径规划[J]. 系统仿真学报, 2025, 37(9):2420-2430.
doi: 10.16182/j.issn1004731x.joss.24-0369 |
|
doi: 10.16182/j.issn1004731x.joss.24-0369 |
|
| [13] |
doi: 10.1109/ACCESS.2023.3273164 URL |
| [14] |
田箫源, 董秀成. 基于改进DQN的移动机器人避障路径规划[J]. 中国惯性技术学报, 2024, 32(4):406-416.
|
|
|
|
| [15] |
李宗刚, 韩森, 陈引娟, 等. 基于角度搜索和深度Q网络的移动机器人路径规划算法[J]. 兵工学报, 2025, 46(2):32-46.
|
|
|
|
| [16] |
|
| [17] |
王小康, 冀杰, 刘洋, 等. 基于改进Q学习算法的无人物流配送车路径规划[J]. 系统仿真学报, 2024, 36(5):1211-1221.
doi: 10.16182/j.issn1004731x.joss.23-0051 |
|
doi: 10.16182/j.issn1004731x.joss.23-0051 |
|
| [18] |
王霄龙, 陈洋, 胡棉, 等. 基于改进深度Q网络的机器人持续监测路径规划[J]. 兵工学报, 2024, 45(6):1813-1823.
doi: 10.12382/bgxb.2023.0227 |
|
doi: 10.12382/bgxb.2023.0227 |
|
| [19] |
黄岩松, 姚锡凡, 景轩, 等. 基于深度Q网络的多起点多终点AGV路径规划[J]. 计算机集成制造系统, 2023, 29(8):2550-2562.
|
|
|
|
| [20] |
夏雨奇, 黄炎焱, 陈恰. 基于深度Q网络的无人车侦察路径规划[J]. 系统工程与电子技术, 2024, 46(9):3070-3081.
doi: 10.12305/j.issn.1001-506X.2024.09.19 |
|
doi: 10.12305/j.issn.1001-506X.2024.09.19 |
|
| [21] |
周治国, 余思雨, 于家宝, 等. 面向无人艇的T-DQN智能避障算法研究[J]. 自动化学报, 2023, 49(8):1645-1655.
|
|
|
|
| [22] |
田晓航, 霍鑫, 周典乐, 等. 基于蚁群信息素辅助的Q学习路径规划算法[J]. 控制与决策, 2023, 38(12):3345-3353.
|
|
|
|
| [23] |
doi: 10.1016/j.cie.2023.109112 URL |
| [24] |
|
| [1] | ZHANG Tian, HU Yunqi, CHEN Zhaowen, WANG Qiang, YANG Zhilai, GUO Meng. Coverage Path Planning Technology for UAV in Complex Planar Regions [J]. Acta Armamentarii, 2025, 46(S1): 250229-. |
| [2] | SUN Kang, XUE Dingrui, FAN Ji, LIN Yuqing, LI Bo, WANG Kexin, LIU Jiancheng, WEI Siwen. A Reinforcement Learning Method for Optimizing Air Combat Threat Assessment via Cross-attention Mechanisms and Expert-guided Reward Shaping [J]. Acta Armamentarii, 2025, 46(S1): 250606-. |
| [3] | WANG Yu, LI Yuanpeng, GUO Zhongyu, LI Shuo, REN Tianjun. Hierarchical Decision-making for UAV Air Combat Based on DDQN-D3PG [J]. Acta Armamentarii, 2025, 46(8): 240978-. |
| [4] | WANG Cuncan, WANG Xiaofang, LIN Hai. A Cooperative Guidance Law Based on Meta-learning and Reinforcement Learning for Multiple Aerial Vehicles [J]. Acta Armamentarii, 2025, 46(7): 240568-. |
| [5] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [6] | LU Xiaoran, ZOU Yuan, ZHANG Xudong, SUN Wei, MENG Yihao, ZHANG Bin. Energy Management Strategy Optimized by Munchausen-PER-DDQN for Hybrid Tracked Vehicle [J]. Acta Armamentarii, 2025, 46(6): 240498-. |
| [7] | WANG Yitao, WANG Junsen, SHI Zhangsong, XU Huihui, ZHU Weiming. Task Allocation for Multi-agent System Based on Extended Rapidly-exploring Random Tree and Contract Net [J]. Acta Armamentarii, 2025, 46(5): 240743-. |
| [8] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [9] | XIAN Sujie, WANG Kang, ZENG Xin, SONG Jie, WU Zhilin. An Impact Angle and Field of View Constraints Guidance Law Based on Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240435-. |
| [10] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| [11] | PAN Yunwei, LI Min, ZENG Xiangguang, HUANG Ao, ZHANG Jiaheng, REN Wenzhe, PENG Bei. AUV Obstacle Avoidance and Path Planning Based on Artificial Potential Field and Improved Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(4): 240300-. |
| [12] | LI Chuanhao, MING Zhenjun, WANG Guoxin, YAN Yan, DING Wei, WAN Silai, DING Tao. Dynamic Decision-making Method of Unmanned Platform Chaff Jamming for Terminal Defense Based on Multi-agent Deep Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(3): 240251-. |
| [13] | ZHANG Wang, SHAO Xuehui, TANG Huilong, WEI Jianlin, WANG Wei. A Reinforcement Learning-based Radar Jamming Decision-making Method with Adaptive Setting of Exploration Rate [J]. Acta Armamentarii, 2025, 46(3): 240357-. |
| [14] | XIAO Liujun, LI Yaxuan, LIU Xinfu. Adaptive Terminal Guidance for Hypersonic Gliding Vehicles Using Reinforcement Learning [J]. Acta Armamentarii, 2025, 46(2): 240222-. |
| [15] | LI Zonggang, HAN Sen, CHEN Yinjuan, NING Xiaogang. A Path Planning Algorithm for Mobile Robots Based on Angle Searching and Deep Q-Network [J]. Acta Armamentarii, 2025, 46(2): 240265-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||