
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250023-.doi: 10.12382/bgxb.2025.0023
Previous Articles Next Articles
HE Yang*( ), LI Gang, JI Fengbiao, ZHOU Junpeng
), LI Gang, JI Fengbiao, ZHOU Junpeng
Received:2025-01-07
Online:2025-11-27
Contact:
HE Yang
CLC Number:
HE Yang, LI Gang, JI Fengbiao, ZHOU Junpeng. Research on Intelligent Automobile Trajectory Tracking Control Method Based on VUFAMPC[J]. Acta Armamentarii, 2025, 46(11): 250023-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Automobile yaw dynamic model
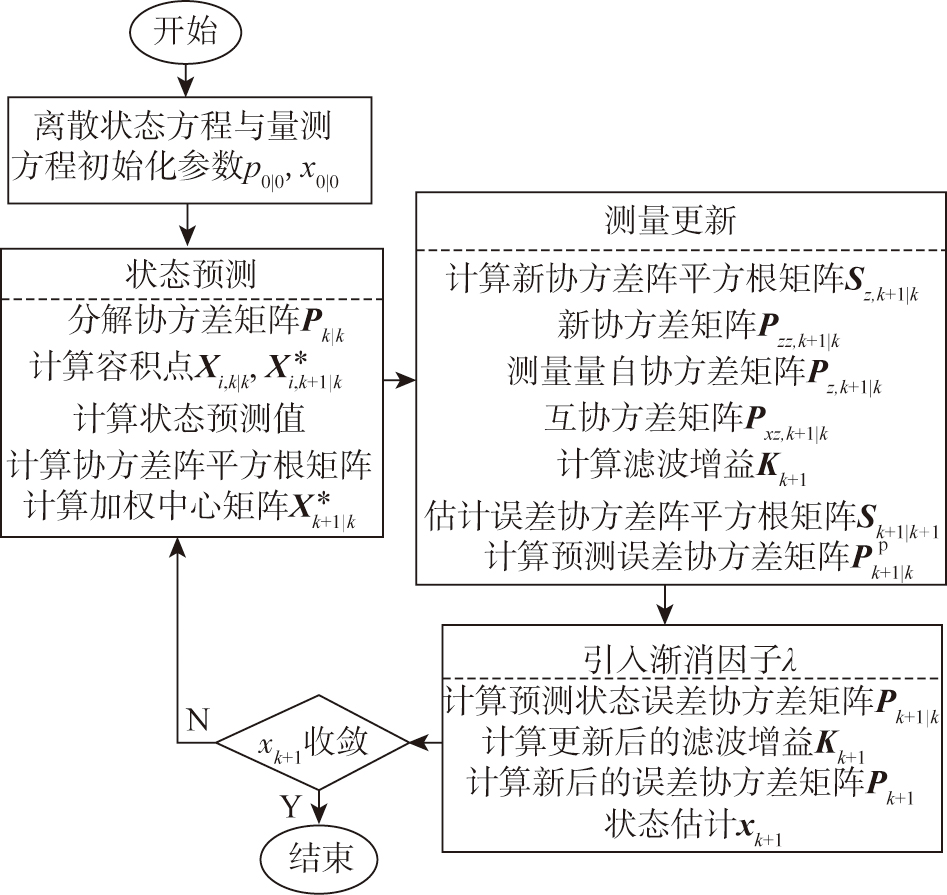
Fig.2 Tire lateral force estimation process based on ST-SRCKF

Fig.3 Double lane changing road model of dockingroad

Fig.4 Estimation of tire lateral force
| 估计方法 及参考值 | 附着 系数 | 轮胎力 | | | RMSE | |
|---|---|---|---|---|---|---|
| SRCKF | 0.85 | FyfL | 6114 | 1868 | 9.59 | |
| FyfR | 5549 | 1719 | 9.83 | |||
| FyrL | 4031 | 1085 | 10.69 | |||
| FyrR | 3751 | 1032 | 11.24 | |||
| 0.85~0.45 | FyfL | 6062 | 1703 | 15.01 | ||
| FyfR | 5456 | 1704 | 15.26 | |||
| FyrL | 4095 | 1085 | 17.23 | |||
| FyrR | 3944 | 1071 | 17.41 | |||
| ST-SRCKF | 0.85 | FyfL | 5973 | 1856 | 4.50 | |
| FyfR | 5419 | 1737 | 4.81 | |||
| FyrL | 4095 | 1084 | 4.53 | |||
| FyrR | 3715 | 1069 | 4.87 | |||
| 0.85~0.45 | FyfL | 5906 | 1784 | 6.03 | ||
| FyfR | 5343 | 1715 | 6.16 | |||
| FyrL | 3962 | 1104 | 6.33 | |||
| FyrR | 3623 | 1053 | 6.46 | |||
| 参考值 | FyfL | 5825 | 1831 | |||
| FyfR | 5337 | 1765 | ||||
| FyrL | 4073 | 1001 | ||||
| FyrR | 3717 | 1046 | ||||
Table 1 Statistical values of tire lateral force estimation
| 估计方法 及参考值 | 附着 系数 | 轮胎力 | | | RMSE | |
|---|---|---|---|---|---|---|
| SRCKF | 0.85 | FyfL | 6114 | 1868 | 9.59 | |
| FyfR | 5549 | 1719 | 9.83 | |||
| FyrL | 4031 | 1085 | 10.69 | |||
| FyrR | 3751 | 1032 | 11.24 | |||
| 0.85~0.45 | FyfL | 6062 | 1703 | 15.01 | ||
| FyfR | 5456 | 1704 | 15.26 | |||
| FyrL | 4095 | 1085 | 17.23 | |||
| FyrR | 3944 | 1071 | 17.41 | |||
| ST-SRCKF | 0.85 | FyfL | 5973 | 1856 | 4.50 | |
| FyfR | 5419 | 1737 | 4.81 | |||
| FyrL | 4095 | 1084 | 4.53 | |||
| FyrR | 3715 | 1069 | 4.87 | |||
| 0.85~0.45 | FyfL | 5906 | 1784 | 6.03 | ||
| FyfR | 5343 | 1715 | 6.16 | |||
| FyrL | 3962 | 1104 | 6.33 | |||
| FyrR | 3623 | 1053 | 6.46 | |||
| 参考值 | FyfL | 5825 | 1831 | |||
| FyfR | 5337 | 1765 | ||||
| FyrL | 4073 | 1001 | ||||
| FyrR | 3717 | 1046 | ||||
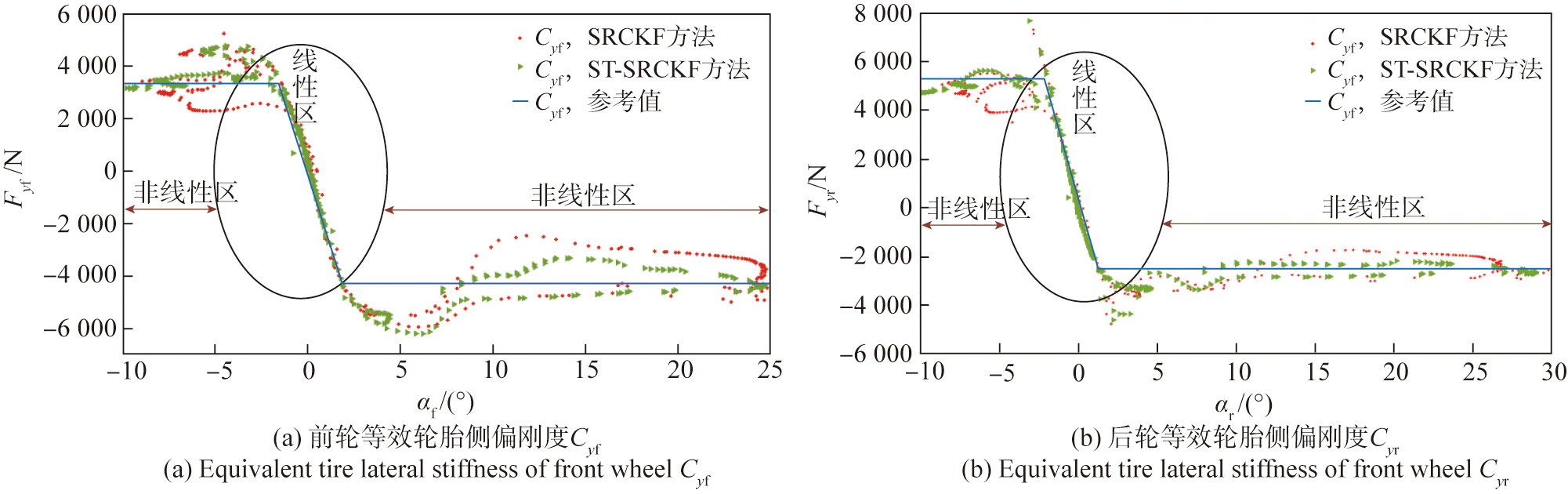
Fig.5 Estimated results of tire lateral stiffness
| dey | ey | |||||||
|---|---|---|---|---|---|---|---|---|
| 正 | 负 | |||||||
| 正 | ψ<ψref | ey ↑ | τQ ↑ | τR↑ | ψ>ψref | ey ↓ | τQ ↑ | τR ↓ |
| 负 | ψ<ψref | ey ↓ | τQ↑ | τR↓ | ψ>ψref | ey ↑ | τQ↑ | τR ↑ |
Table 2 Input and output relationship list
| dey | ey | |||||||
|---|---|---|---|---|---|---|---|---|
| 正 | 负 | |||||||
| 正 | ψ<ψref | ey ↑ | τQ ↑ | τR↑ | ψ>ψref | ey ↓ | τQ ↑ | τR ↓ |
| 负 | ψ<ψref | ey ↓ | τQ↑ | τR↓ | ψ>ψref | ey ↑ | τQ↑ | τR ↑ |
| τQ/τR | ey | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| dey | NB | PB/PB | PM/PB | PS/PB | ZO/PB | PS/PB | PM/PB | PB/PB |
| NM | PB/PM | PM/PM | PS/PM | ZO/PM | PS/PM | PM/PM | PB/PM | |
| NS | PB/PS | PM/PS | PS/PS | ZO/PS | PS/PS | PM/PS | PB/PS | |
| ZO | PB/PS | PM/PS | PS/ZO | ZO/ZO | PS/ZO | PM/PS | PB/PS | |
| PS | PB/PS | PM/PS | PS/PS | ZO/PS | PS/PS | PM/PS | PB/PS | |
| PM | PB/PM | PM/PM | PS/PM | ZO/PM | PS/PM | PM/PM | PB/PM | |
| PB | PB/PB | PM/PB | PS/PB | ZO/PB | PS/PB | PM/PB | PB/PB | |
Table 3 Fuzzy rules
| τQ/τR | ey | |||||||
|---|---|---|---|---|---|---|---|---|
| NB | NM | NS | ZO | PS | PM | PB | ||
| dey | NB | PB/PB | PM/PB | PS/PB | ZO/PB | PS/PB | PM/PB | PB/PB |
| NM | PB/PM | PM/PM | PS/PM | ZO/PM | PS/PM | PM/PM | PB/PM | |
| NS | PB/PS | PM/PS | PS/PS | ZO/PS | PS/PS | PM/PS | PB/PS | |
| ZO | PB/PS | PM/PS | PS/ZO | ZO/ZO | PS/ZO | PM/PS | PB/PS | |
| PS | PB/PS | PM/PS | PS/PS | ZO/PS | PS/PS | PM/PS | PB/PS | |
| PM | PB/PM | PM/PM | PS/PM | ZO/PM | PS/PM | PM/PM | PB/PM | |
| PB | PB/PB | PM/PB | PS/PB | ZO/PB | PS/PB | PM/PB | PB/PB | |

Fig.6 Membership functions of input and output
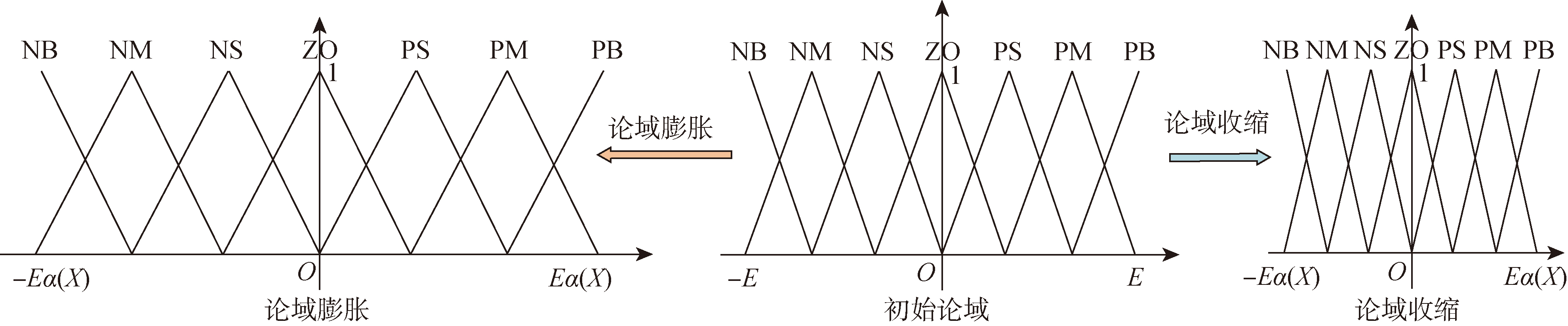
Fig.7 Schematic diagram of variable universe
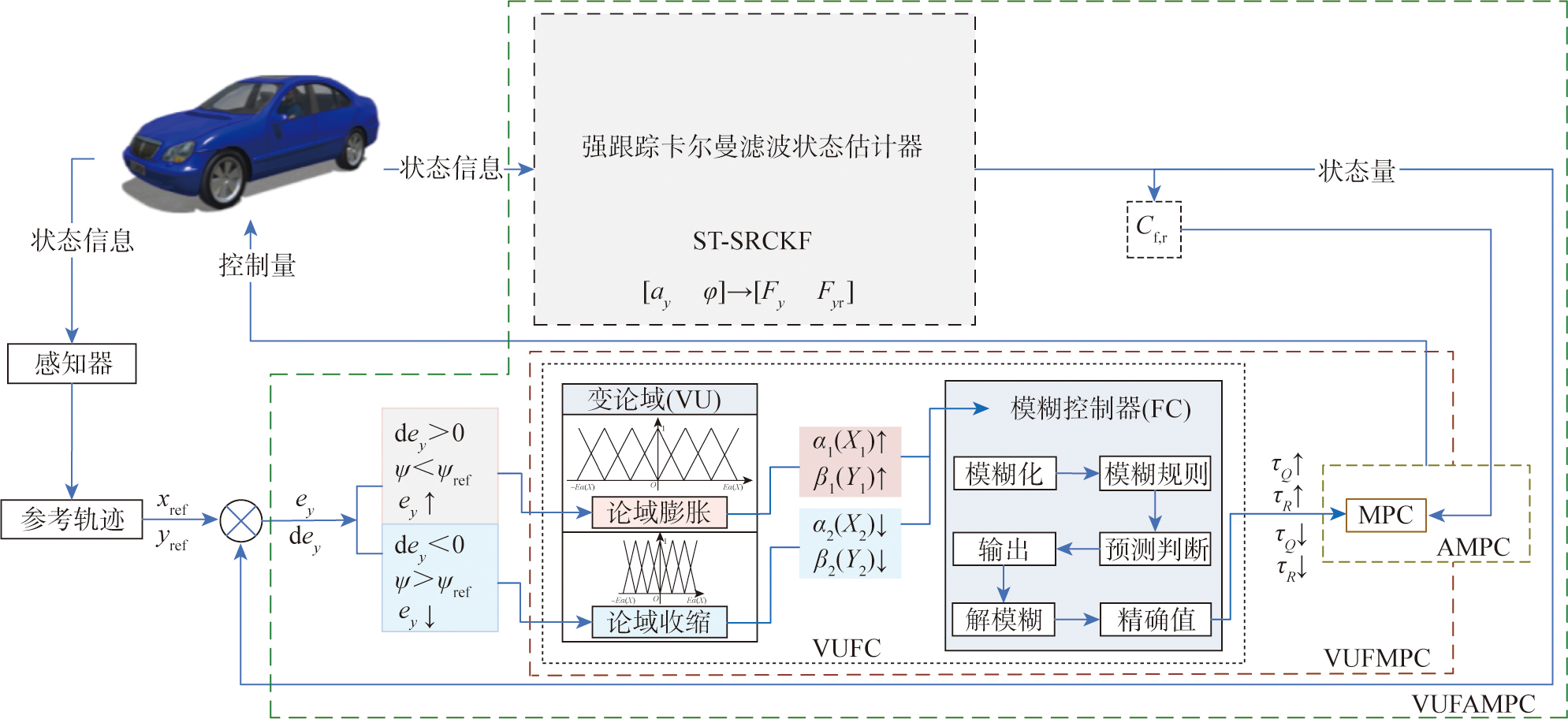
Fig.8 Control principle of VUFAMPC
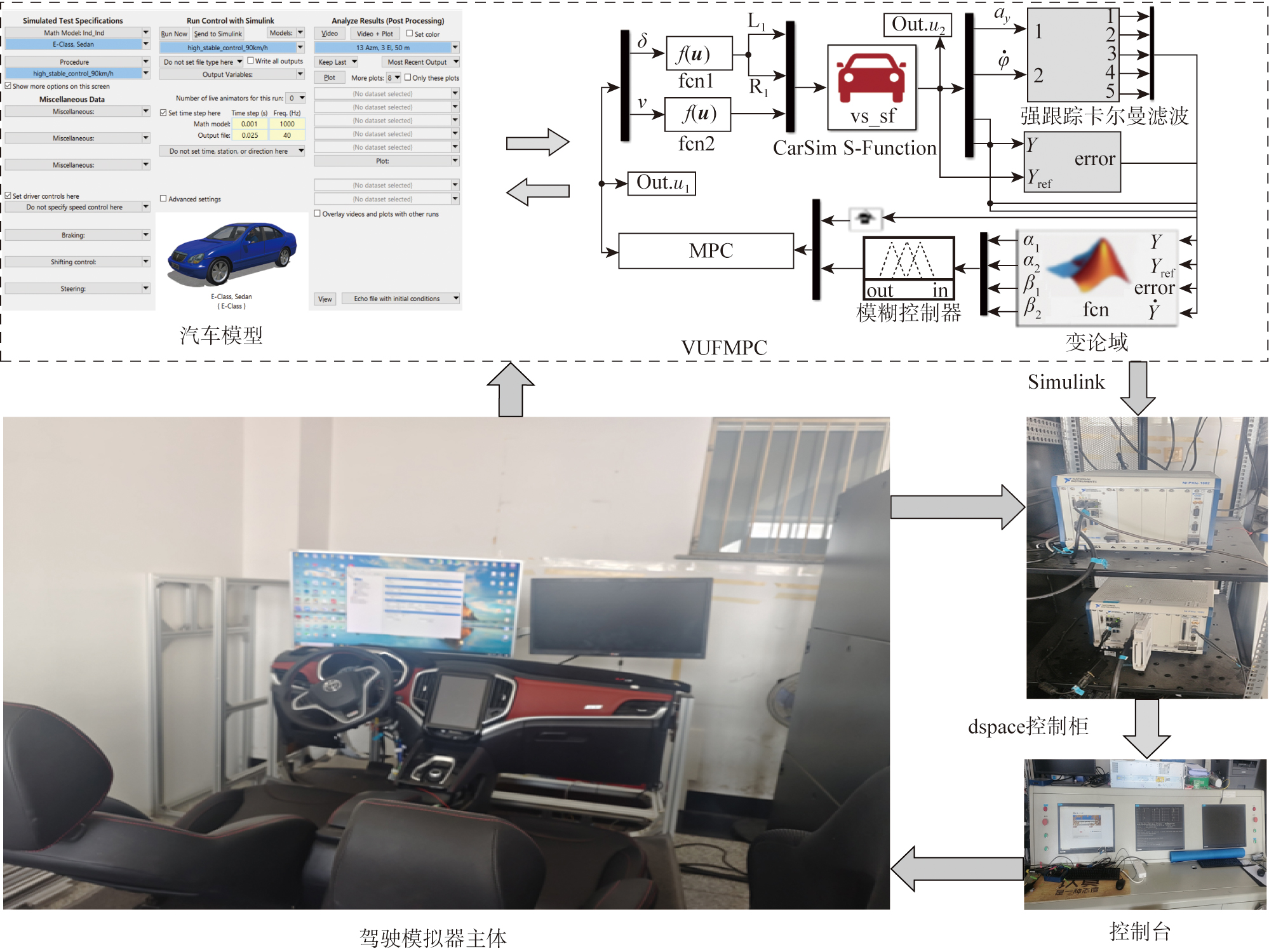
Fig.9 HIL experiment platform
| 长×宽×高/m 4.78×1.87×1.46 | m/kg 1420 | Ix/(kg·m-2) 635.3 | Iy/(kg·m-2) 1837.8 | Iz/(kg·m-2) 2273.1 | lf/m 1.22 | lr/m 1.58 |
|---|---|---|---|---|---|---|
| Tf/m | Tr/m | h/m | Cxlf、Cxlr/(105N·m-1) | 轮胎规格 | s | Re/mm |
| 1.68 | 1.69 | 0.55 | 8.5 | 215/55 R17 | 0.2 | 334.15 |
Table 4 Related parameters of automobile
| 长×宽×高/m 4.78×1.87×1.46 | m/kg 1420 | Ix/(kg·m-2) 635.3 | Iy/(kg·m-2) 1837.8 | Iz/(kg·m-2) 2273.1 | lf/m 1.22 | lr/m 1.58 |
|---|---|---|---|---|---|---|
| Tf/m | Tr/m | h/m | Cxlf、Cxlr/(105N·m-1) | 轮胎规格 | s | Re/mm |
| 1.68 | 1.69 | 0.55 | 8.5 | 215/55 R17 | 0.2 | 334.15 |
| Ts/s 0.05 | T/s 0.1 | Nc/s 15 | Np/s 30 | αf,r/(°) (-6,6) | Δu/(°) [-0.015,0.015] | β [0,1] | ε 10 |
|---|---|---|---|---|---|---|---|
| γ | υ | Ej | Uj | ρ | δ/(°) | τQ | τR |
| 0.98 | 1.5 | [-3,3] | [0,1] | 1 000 | [-30,30] | (0,1] | (0,1] |
Table 5 Controller parameters
| Ts/s 0.05 | T/s 0.1 | Nc/s 15 | Np/s 30 | αf,r/(°) (-6,6) | Δu/(°) [-0.015,0.015] | β [0,1] | ε 10 |
|---|---|---|---|---|---|---|---|
| γ | υ | Ej | Uj | ρ | δ/(°) | τQ | τR |
| 0.98 | 1.5 | [-3,3] | [0,1] | 1 000 | [-30,30] | (0,1] | (0,1] |
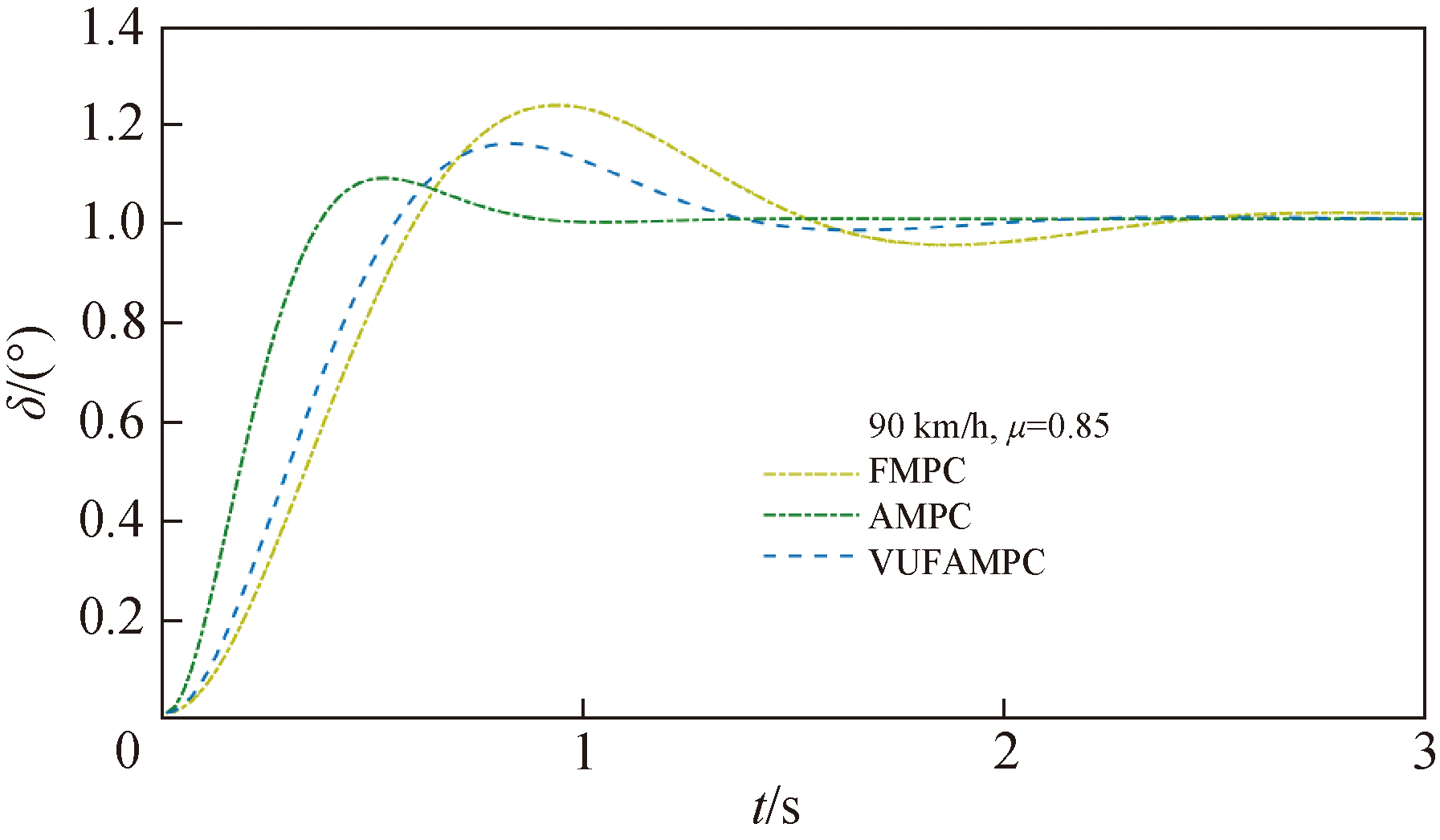
Fig.10 Response characteristics of steering angle
| 参数 | FMPC | AMPC | VUFAMPC | 优化量% | |
|---|---|---|---|---|---|
| VUFAMPC/ FMPC | VUFAMPC/ AMPC | ||||
| 超调量/% | 15.20 | 22.90 | 4.10 | 11.1 | 18.8 |
| 上升时间/s | 0.38 | 0.43 | 0.33 | 13.2 | 23.3 |
| 峰值时间/s | 0.82 | 0.95 | 0.64 | 21.9 | 32.6 |
| 过渡时间/s | 1.18 | 1.96 | 0.63 | 46.6 | 67.9 |
Table 6 Statistical values
| 参数 | FMPC | AMPC | VUFAMPC | 优化量% | |
|---|---|---|---|---|---|
| VUFAMPC/ FMPC | VUFAMPC/ AMPC | ||||
| 超调量/% | 15.20 | 22.90 | 4.10 | 11.1 | 18.8 |
| 上升时间/s | 0.38 | 0.43 | 0.33 | 13.2 | 23.3 |
| 峰值时间/s | 0.82 | 0.95 | 0.64 | 21.9 | 32.6 |
| 过渡时间/s | 1.18 | 1.96 | 0.63 | 46.6 | 67.9 |
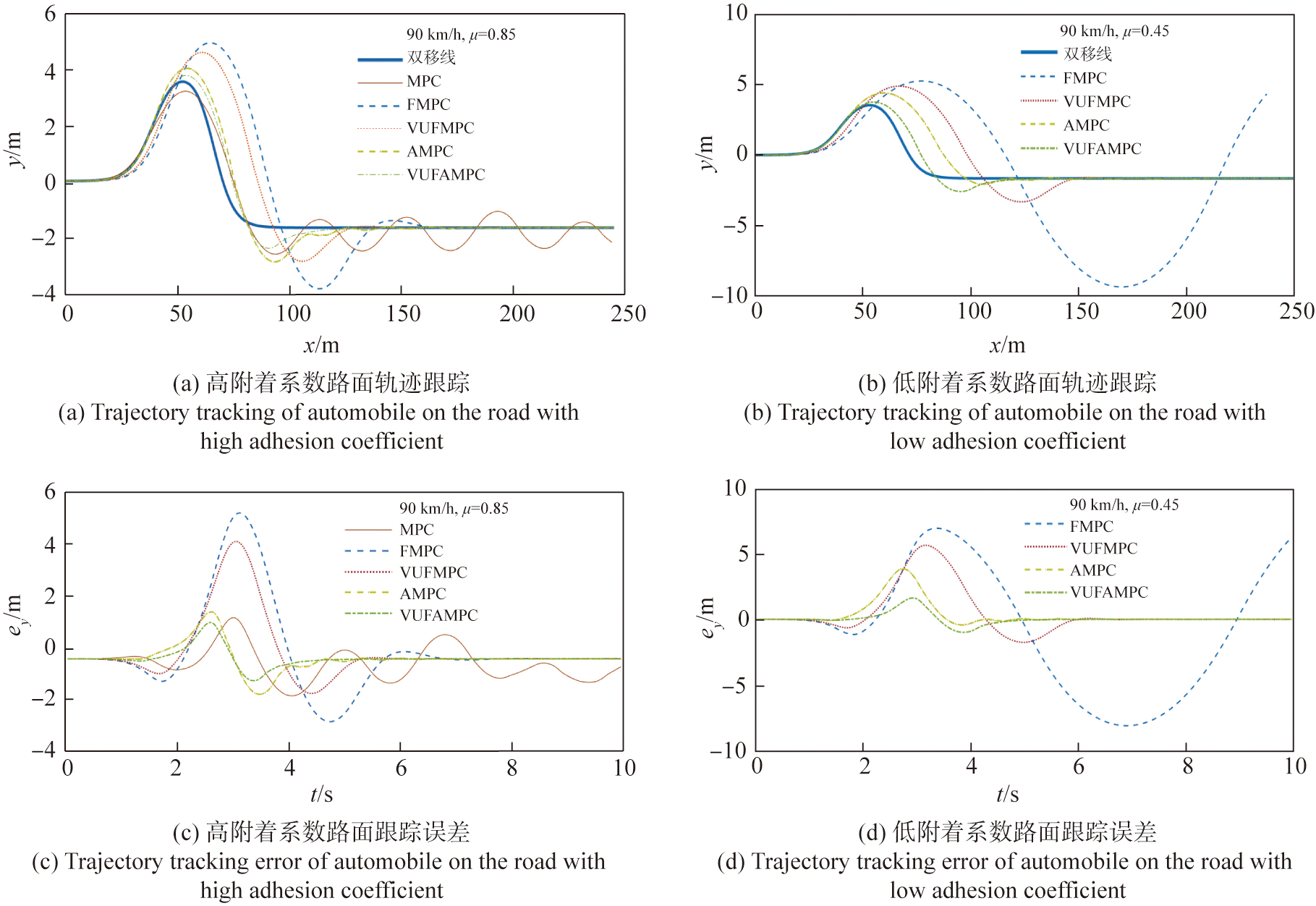
Fig.11 Trajectory tracking and tracking error
| 工况 | | FMPC | VUFMPC /FMPC | AMPC/ FMPC/ VUFMPC | VUFAMPC/ FMPC/ VUFMPC/ AMPC |
|---|---|---|---|---|---|
| 90km/h μ=0.85 | 最大值 | 4.65 | 3.86 | 1.61 | 1.21 |
| 均值 | 0.65 | 0.41 | 0.25 | 0.18 | |
| RMSE | 1.201 | 0.876 | 0.451 | 0.368 | |
| 优化量/ % | 最大值 | 17.0 | 65.4/ 58.3 | 73.9/68.7/ 24.8 | |
| 均值 | 36.9 | 61.5/ 39 | 72.3/56.1/ 28 | ||
| 90km/h μ=0.45 | 最大值 | 7.67 | 4.98 | 3.64 | 1.54 |
| 均值 | 5.15 | 0.62 | 0.43 | 0.17 | |
| RMSE | 3.861 | 1.178 | 0.923 | 0.529 | |
| 优化量/ % | 最大值 | 35.1 | 52.5/ 26.9 | 79.9/69.1/ 57.7 | |
| 均值 | 87.9 | 91.7/ 30.6 | 96.7/72.6/ 60.5 |
Table 7 Statistical values of lateral trajectory tracking error
| 工况 | | FMPC | VUFMPC /FMPC | AMPC/ FMPC/ VUFMPC | VUFAMPC/ FMPC/ VUFMPC/ AMPC |
|---|---|---|---|---|---|
| 90km/h μ=0.85 | 最大值 | 4.65 | 3.86 | 1.61 | 1.21 |
| 均值 | 0.65 | 0.41 | 0.25 | 0.18 | |
| RMSE | 1.201 | 0.876 | 0.451 | 0.368 | |
| 优化量/ % | 最大值 | 17.0 | 65.4/ 58.3 | 73.9/68.7/ 24.8 | |
| 均值 | 36.9 | 61.5/ 39 | 72.3/56.1/ 28 | ||
| 90km/h μ=0.45 | 最大值 | 7.67 | 4.98 | 3.64 | 1.54 |
| 均值 | 5.15 | 0.62 | 0.43 | 0.17 | |
| RMSE | 3.861 | 1.178 | 0.923 | 0.529 | |
| 优化量/ % | 最大值 | 35.1 | 52.5/ 26.9 | 79.9/69.1/ 57.7 | |
| 均值 | 87.9 | 91.7/ 30.6 | 96.7/72.6/ 60.5 |

Fig.12 Trajectory tracking and trajectory error of automobile on dockingroad
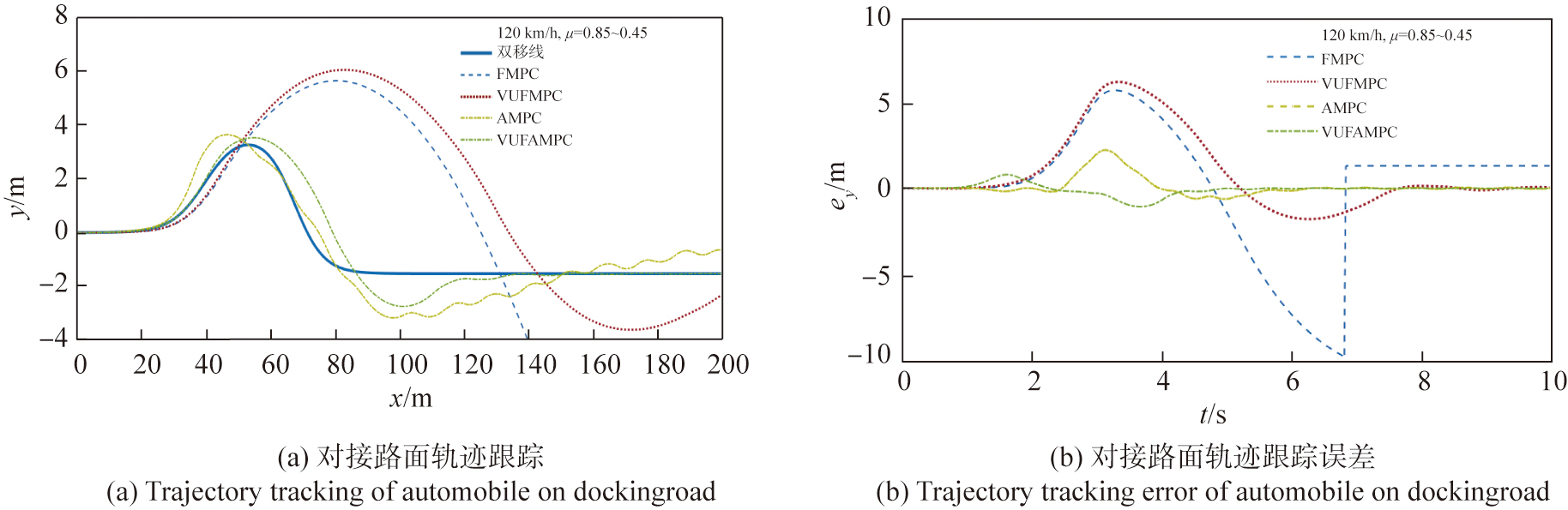
Fig.13 Trajectory tracking and trajectory error of automobile on dockingroad
| 工况 | | FMPC | VUFMPC | AMPC/VUFMPC | VUFAMPC/VUFMPC/AMPC |
|---|---|---|---|---|---|
| 90km/h μ∈0.85~0.45 | 最大值 | 12.80 | 7.34 | 1.78 | 1.35 |
| 均值 | 5.04 | 1.70 | 0.61 | 0.22 | |
| RMSE | 6.72 | 2.809 | 0.710 | 0.405 | |
| 优化量/% | 最大值 | 75.7 | 81.6/24.2 | ||
| 均值 | 64.1 | 87.1/63.9 | |||
| 120km/h μ∈0.85~0.45 | 最大值 | 21.90 | 7.79 | 2.81 | 1.55 |
| 均值 | 3.93 | 1.88 | 0.34 | 0.18 | |
| RMSE | 7.077 | 3.061 | 0.786 | 0.415 | |
| 优化量/% | 最大值 | 63.9 | 80.1/44.8 | ||
| 均值 | 81.9 | 90.4/47.1 |
Table 8 Statistical values of lateral trajectory tracking errors(dockingroad)
| 工况 | | FMPC | VUFMPC | AMPC/VUFMPC | VUFAMPC/VUFMPC/AMPC |
|---|---|---|---|---|---|
| 90km/h μ∈0.85~0.45 | 最大值 | 12.80 | 7.34 | 1.78 | 1.35 |
| 均值 | 5.04 | 1.70 | 0.61 | 0.22 | |
| RMSE | 6.72 | 2.809 | 0.710 | 0.405 | |
| 优化量/% | 最大值 | 75.7 | 81.6/24.2 | ||
| 均值 | 64.1 | 87.1/63.9 | |||
| 120km/h μ∈0.85~0.45 | 最大值 | 21.90 | 7.79 | 2.81 | 1.55 |
| 均值 | 3.93 | 1.88 | 0.34 | 0.18 | |
| RMSE | 7.077 | 3.061 | 0.786 | 0.415 | |
| 优化量/% | 最大值 | 63.9 | 80.1/44.8 | ||
| 均值 | 81.9 | 90.4/47.1 |

Fig.14 Changes of lateral acceleration
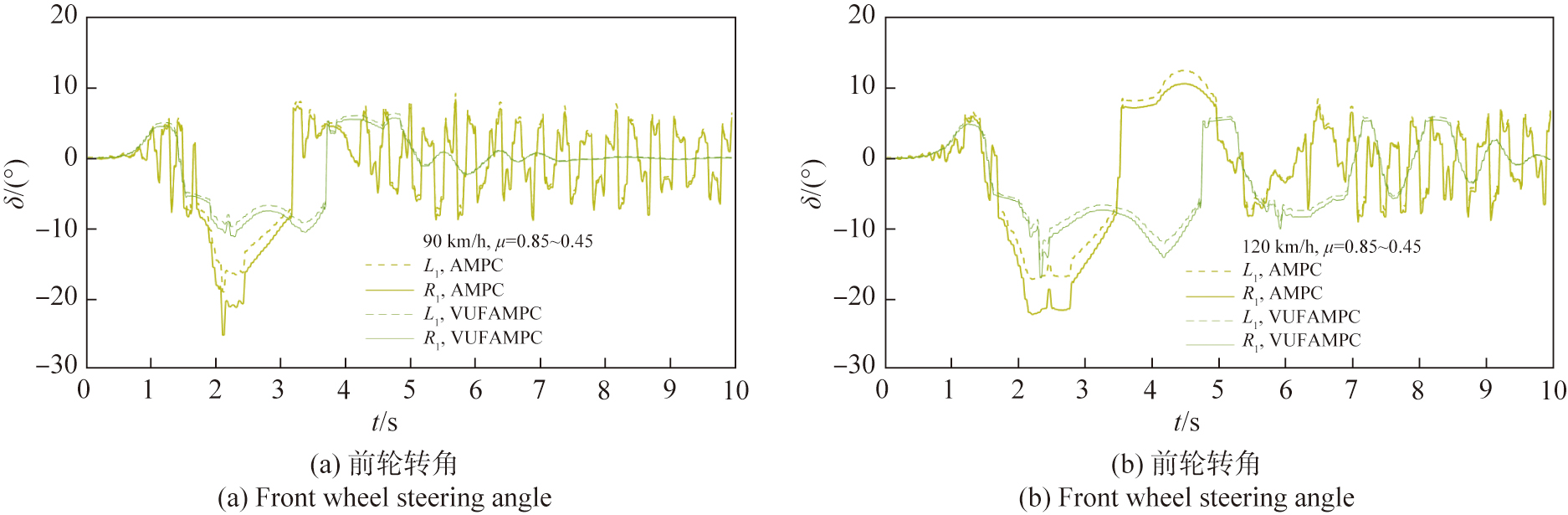
Fig.15 Change of front wheel steering angle
| [1] |
谢宪毅, 王禹涵, 金立生, 等. 基于改变控制时域时间步长的智能车轨迹跟踪控制[J]. 吉林大学学报(工学版), 2024, 54(3):620-630.
|
|
|
|
| [2] |
杜荣华, 胡鸿飞, 高凯, 等. 基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J]. 机械工程学报, 2022, 58(24):275-288.
doi: 10.3901/JME.2022.24.275 |
|
doi: 10.3901/JME.2022.24.275 |
|
| [3] |
何智成, 王煜凡, 韦宝侣, 等. 基于优化动力学模型的路径跟踪控制研究[J]. 中国机械工程, 2024, 35(6):1000-1009.
|
|
|
|
| [4] |
李旭阳, 许鸣珠, 韩刚, 等. 智能汽车自适应工况路径跟踪控制[J]. 中国测试, 2024, 50(9):37-45.
|
|
|
|
| [5] |
李韶华, 杨泽坤, 王雪玮. 基于T-S模糊变权重MPC的智能车轨迹跟踪控制[J]. 机械工程学报, 2023, 59(4):199-212.
doi: 10.3901/JME.2023.04.199 |
|
doi: 10.3901/JME.2023.04.199 |
|
| [6] |
|
| [7] |
doi: 10.1007/s11071-024-10042-x |
| [8] |
doi: 10.3390/s21217165 URL |
| [9] |
doi: 10.1007/s12206-024-0532-z |
| [10] |
doi: 10.1109/TNNLS.2020.3048305 pmid: 33471771 |
| [11] |
查云飞, 吕小龙, 陈慧勤, 等. 基于路面附着系数估计的车辆轨迹跟踪控制[J]. 汽车工程, 2023, 45(6):1010-1021.
|
|
|
|
| [12] |
doi: 10.1177/01423312231197854 URL |
| [13] |
王志文, 辛鹏, 孙洪涛, 等. 基于收缩约束模型预测控制的无人车辆路径跟踪[J]. 控制与决策, 2022, 37(3):625-634.
|
|
|
|
| [14] |
金辉, 鲁坤. 基于多参数自适应优化的智能车轨迹跟踪[J]. 中国公路学报, 2023, 36(5):260-272.
doi: 10.19721/j.cnki.1001-7372.2023.05.022 |
|
doi: 10.19721/j.cnki.1001-7372.2023.05.022 |
|
| [15] |
doi: 10.3390/app14167285 URL |
| [16] |
李韶华, 王桂洋, 杨泽坤, 等. 基于DRBF-EKF算法的车辆质心侧偏角与路面附着系数动态联合估计[J]. 力学学报, 2022, 54(7):1853-1865.
|
|
|
|
| [17] |
张志达, 郑玲, 吴行, 等. 基于鲁棒自适应UKF的分布式电动汽车状态估计[J]. 中国科学:技术科学, 2020, 50(11):1461-1473.
|
|
doi: 10.1360/SST-2019-0326 URL |
|
| [18] |
|
| [19] |
张军, 张闲, 张雪莹, 等. 四轮独立转向无人车辆斜向行驶轨迹跟踪控制方法[J]. 北京理工大学学报, 2023, 43(2):161-169.
|
|
|
|
| [20] |
doi: 10.1016/j.conengprac.2024.105905 URL |
| [21] |
邓海鹏, 麻斌, 赵海光, 等. 自主驾驶车辆紧急避障的路径规划与轨迹跟踪控制[J]. 兵工学报, 2020, 41(3):585-594.
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
doi: 10.3969/j.issn.1000-1093.2020.03.020 |
|
| [22] |
doi: 10.1109/ACCESS.2021.3072648 URL |
| [23] |
doi: 10.1016/j.isatra.2020.10.048 URL |
| [24] |
何洋, 李刚, 余孝楠. 基于变论域的高速行驶智能汽车模糊模型预测控制方法研究[J]. 中国机械工程, 2025, 36(3):604-613.
|
|
|
|
| [25] |
汪洪波, 王春阳, 赵林峰, 等. 基于强化学习的智能车辆路径跟踪变参数MPC多目标控制[J]. 中国公路学报, 2024, 37(3):157-169.
doi: 10.19721/j.cnki.1001-7372.2024.03.007 |
|
|
|
| [26] |
doi: 10.1109/TNNLS.2020.3048305 pmid: 33471771 |
| [1] | ZHU Zejun, WANG Wei, LIN Shiyao, JI Yi. Adaptive Neural Network Output Feedback Control Method for Electromechanical Actuator with Backlash and Saturation [J]. Acta Armamentarii, 2025, 46(S1): 250398-. |
| [2] | WANG Wei, LIU Jiaqi, LIN Shiyao, ZHU Zejun, JI Yi. Adaptive Neural Network-based Flight Vehicle Attitude Controller with Prescribed Performance Constraint [J]. Acta Armamentarii, 2025, 46(S1): 250401-. |
| [3] | HUANG Wenyu, XIONG Gang, LI Longlong, ZHANG Shuning, YU Wenxian. UWBR Ground Target Recognition Method Based on Range Doppler Map and Adaptive Feature Selection Network [J]. Acta Armamentarii, 2025, 46(9): 241057-. |
| [4] | YUAN Shusen, HU Zhe, YI Wenjun, DENG Wenxiang, YAO Jianyong, YANG Guolai, GUAN Jun, WANG Yimin. Active Disturbance Adaptive Composite Control of Stabilization System for Unmanned Vehicle-mounted Gun during Moving [J]. Acta Armamentarii, 2025, 46(9): 240888-. |
| [5] | LI Qin, HE Hongwen, HU Manjiang. Model Predictive Control of Unmanned Vehicle Trajectory Tracking Based on Gaussian Process Regression [J]. Acta Armamentarii, 2025, 46(8): 240904-. |
| [6] | ZHANG Fawang, CHEN Liangfa, DUAN Jingliang, LIU Hui, NIE Shida, ZHANG Chen. Bi-level Strategy Trajectory Tracking Control of Multi-axle Articulated Wheeled Vehicle [J]. Acta Armamentarii, 2025, 46(8): 240954-. |
| [7] | ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm [J]. Acta Armamentarii, 2025, 46(8): 240997-. |
| [8] | WANG Jun, HE Xiaoqi, WANG Hao, DONG Yuliang, ZHANG Xue, LUO Tao, CHEN Peng. A Hybrid Analog-digital Adaptive Beamforming Method for Jamming Suppression [J]. Acta Armamentarii, 2025, 46(7): 240703-. |
| [9] | WANG Boyang, LI Xinping, SONG Junjie, GUAN Haijie, LIU Hai’ou, CHEN Huiyan. A Trajectory Tracking Control Method Incorporating Behavior Primitive Optimization and Game Coordination [J]. Acta Armamentarii, 2025, 46(7): 240575-. |
| [10] | ZHAI Weiguang, WANG Feng, MA Xingyu, ZHAO Wei, MENG Pengshuai. YSG-SLAM:a Real-time Semantic RGB-D SLAM Based on YOLACT in Dynamic Scene [J]. Acta Armamentarii, 2025, 46(6): 240443-. |
| [11] | NI Yingfeng, CHEN Xiaowei. Characteristics of Fragment Cloud Produced by Hypervelocity Impact of Cylindrical Projectile on Stiffened Plate [J]. Acta Armamentarii, 2025, 46(6): 240812-. |
| [12] | ZHANG Chuang, WEI Chaoqiang, LI Yantong, YU Yan, LIU Jinchao. Ship-drone Collaboration Routing for Island and Reef Cruise [J]. Acta Armamentarii, 2025, 46(5): 240505-. |
| [13] | LIU Tiancheng, CHANG Ruosong, XIE Fang, JIANG Zebin, ZHANG Yijing, MAO Ming. Identification of Auditory and Visual Channel Workloads of Special Vehicle Operators Based on EEG Indicators [J]. Acta Armamentarii, 2025, 46(5): 240815-. |
| [14] | SHANG Xiaodong, DONG Li, ZHAO Jianhu, ZHANG Zhiqiang. Classification of Seafloor Sediments Using Acoustic Image Based on Spatially Adaptive Segmentation Scales [J]. Acta Armamentarii, 2025, 46(5): 240599-. |
| [15] | LIU Fang, LIU Yanan, DU Kai. An Adaptive Genetic Optimization Algorithm for Communication Localization [J]. Acta Armamentarii, 2025, 46(4): 240208-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||