
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (S1): 250399-.doi: 10.12382/bgxb.2025.0399
Previous Articles Next Articles
LI Keting1, ZHAO Zijie1,*( ), YING Zhanfeng2, SHEN Shiqi1
), YING Zhanfeng2, SHEN Shiqi1
Received:2025-05-23
Online:2025-11-06
Contact:
ZHAO Zijie
LI Keting, ZHAO Zijie, YING Zhanfeng, SHEN Shiqi. Cross-layer Dynamic Detection Network for Small Target Detection in Aerial Photography[J]. Acta Armamentarii, 2025, 46(S1): 250399-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Structure of YOLOv10

Fig.2 Structure of improved cross-layer dynamic detection network
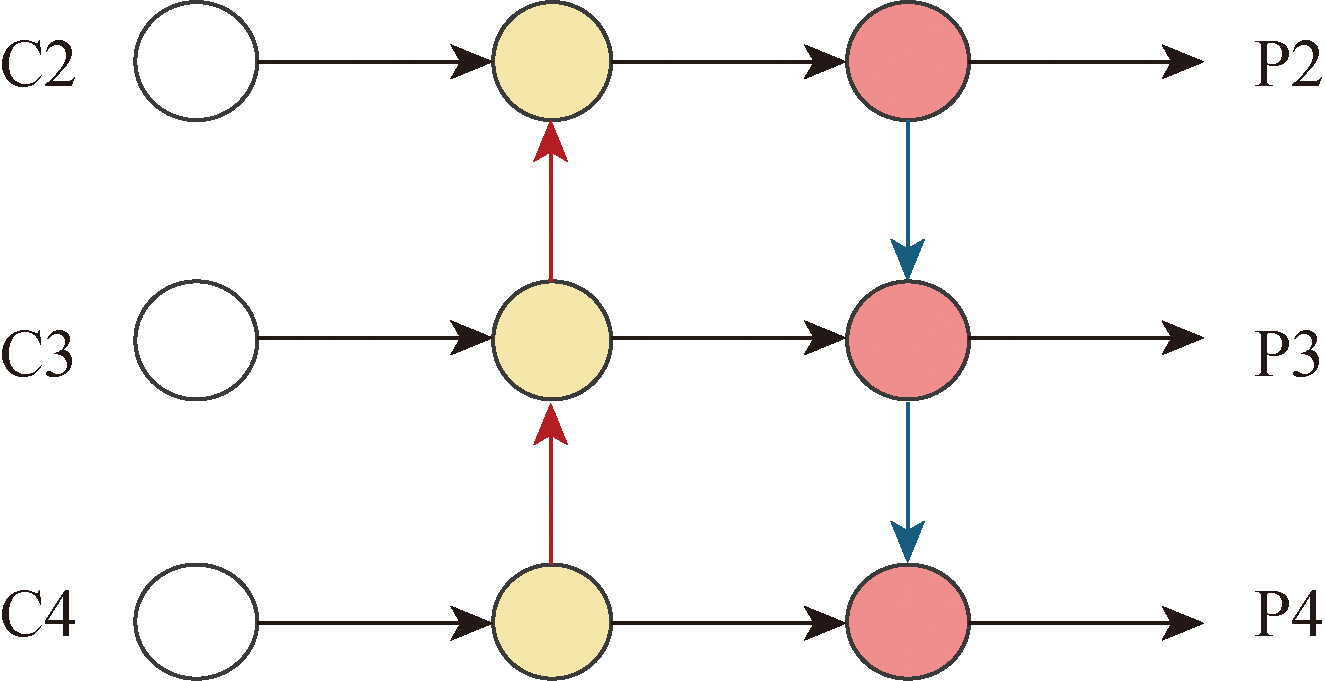
Fig.3 Structure of traditional FPN network

Fig.4 Structure of improved DCF-FPN network

Fig.5 Structure of CSDUS module
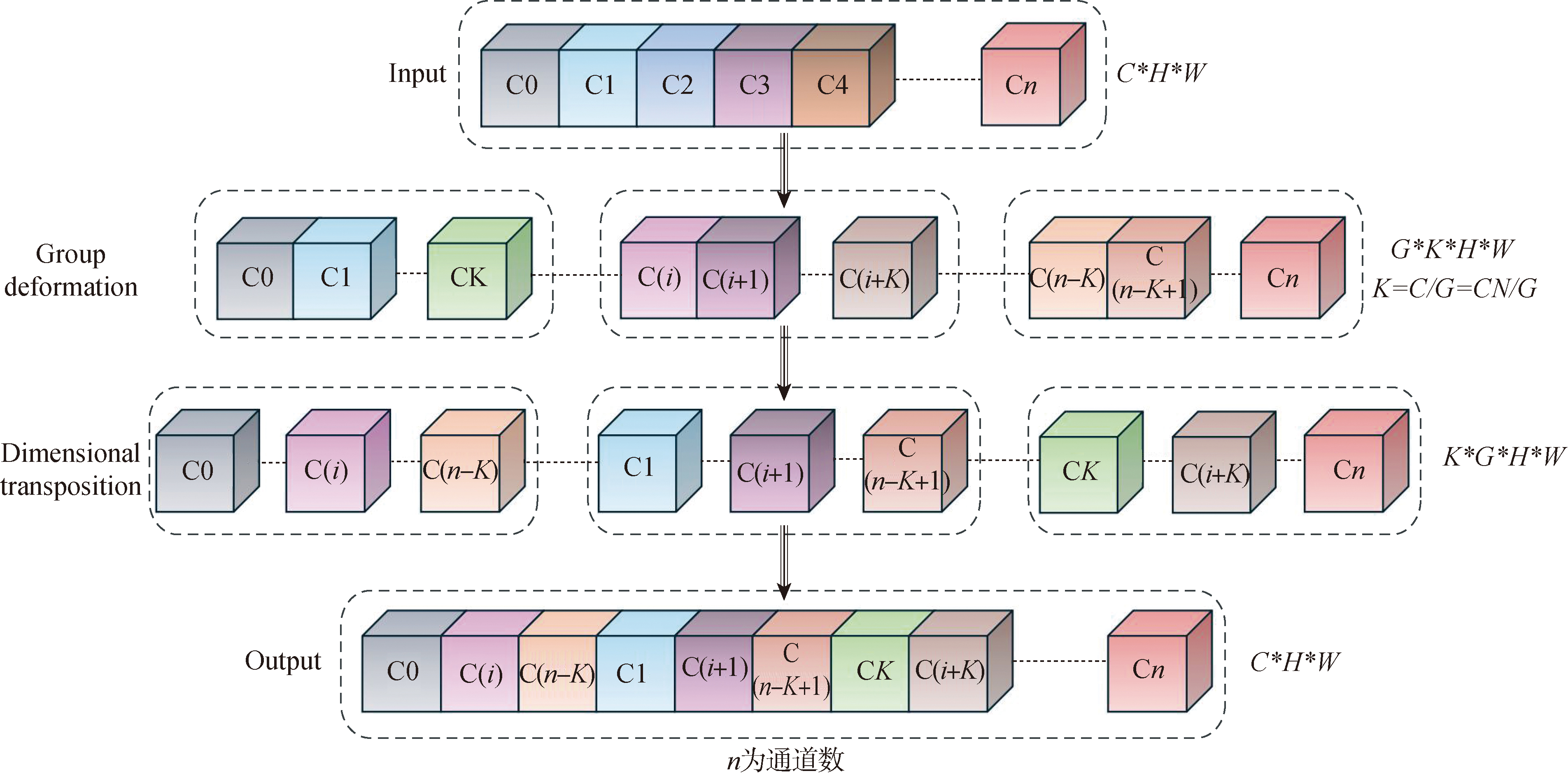
Fig.6 Process of channel shuffling
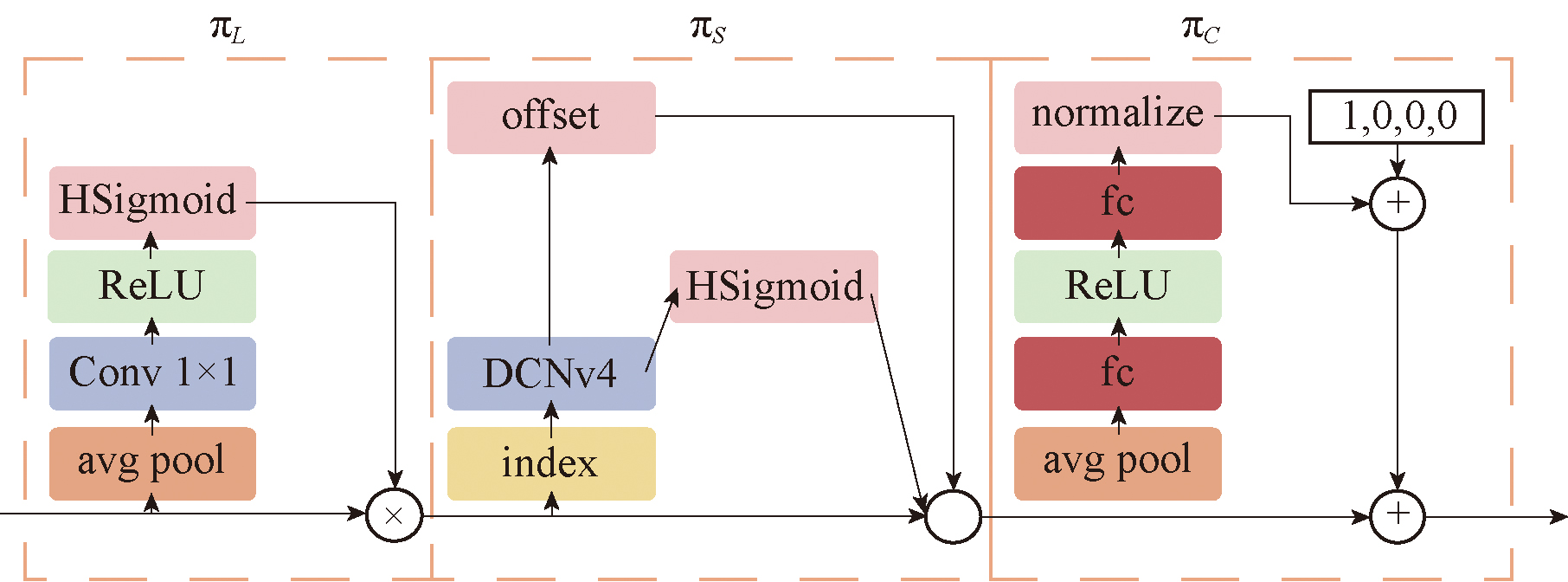
Fig.7 Internal structure of DyHeadBlock

Fig.8 Structure of e2e-DyHead module
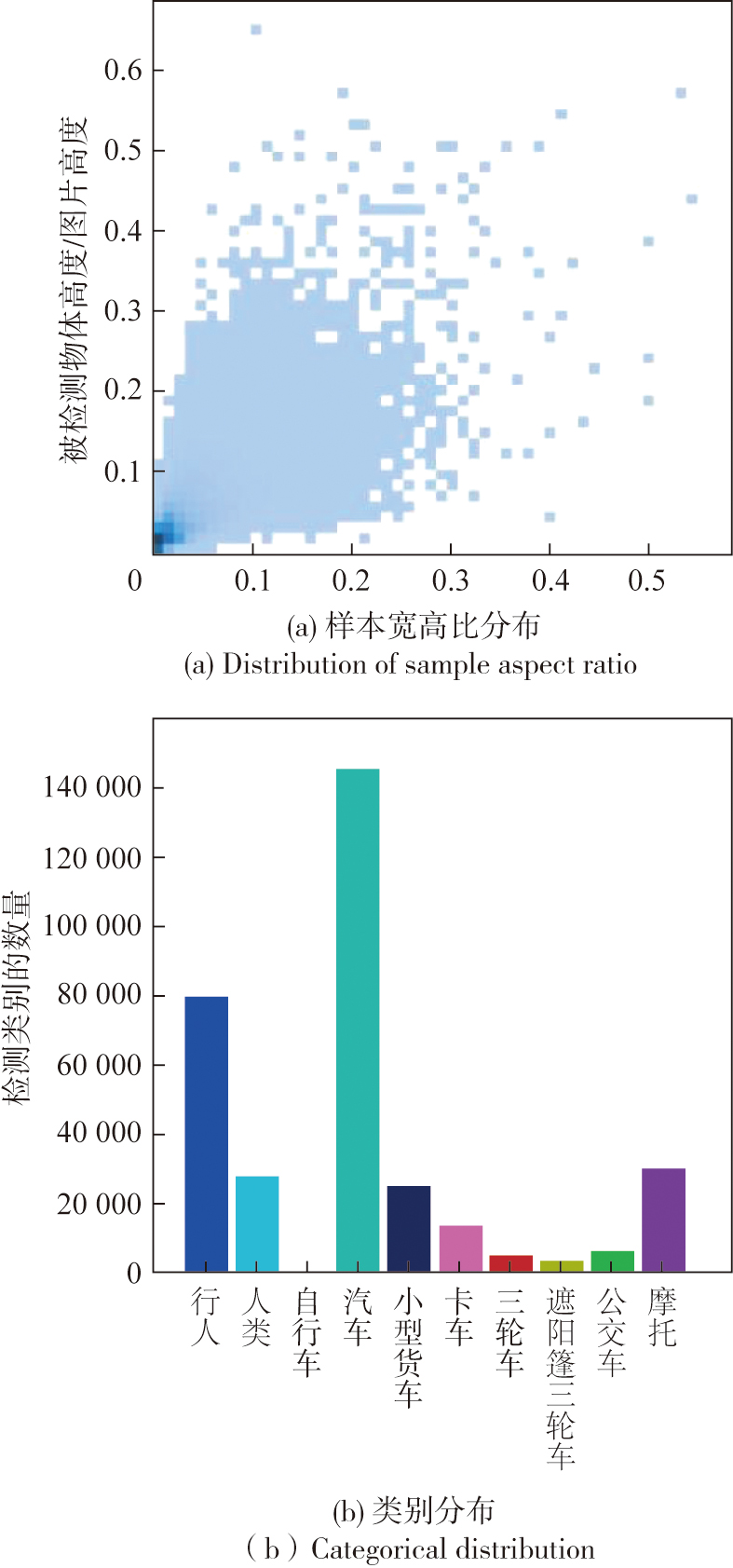
Fig.9 Distribution of training set target sample
| 参数 | 设置 |
|---|---|
| epochs | 300 |
| batch | 8 |
| workers | 8 |
| imgsz | 640 |
| optimizer | SGD |
| lrf lr0 momentum | 0.01 0.1 0.973 |
Table 1 Training parameter settings
| 参数 | 设置 |
|---|---|
| epochs | 300 |
| batch | 8 |
| workers | 8 |
| imgsz | 640 |
| optimizer | SGD |
| lrf lr0 momentum | 0.01 0.1 0.973 |
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 29056 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2f | 788480 | 512 | 40×40 |
| SCDown | 137728 | 1024 | 20×20 |
| C2fCIB | 958464 | 1024 | 20×20 |
| SPPF | 656896 | 1024 | 20×20 |
| PSA | 990976 | 1024 | 20×20 |
Table 2 Parameters of initial YOLOv10s backbone network
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 29056 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2f | 788480 | 512 | 40×40 |
| SCDown | 137728 | 1024 | 20×20 |
| C2fCIB | 958464 | 1024 | 20×20 |
| SPPF | 656896 | 1024 | 20×20 |
| PSA | 990976 | 1024 | 20×20 |
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| C2f | 7360 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 49664 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2fCIB | 249856 | 512 | 40×40 |
| SPPF | 164608 | 512 | 40×40 |
| PSA | 249728 | 512 | 40×40 |
Table 3 Parameters of improved YOLOv10s backbone network
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| C2f | 7360 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 49664 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2fCIB | 249856 | 512 | 40×40 |
| SPPF | 164608 | 512 | 40×40 |
| PSA | 249728 | 512 | 40×40 |
| 改进主 干网络 | DCF-FPN | CSDUS | e2e-DyHead | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% | 参数量/M | GFLOPs | FPS | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Val | Test | Val | Test | Val | Test | Val | Test | ||||||||||
| 51.7 | 44.5 | 38.8 | 35.0 | 40.6 | 32.8 | 24.2 | 18.6 | 7.22 | 21.4 | 153 | |||||||
| √ | 53.9 | 47.8 | 43.8 | 38.0 | 45.2 | 36.9 | 27.4 | 21.0 | 2.21 | 25.7 | 154 | ||||||
| √ | 51.6 | 45.4 | 40.0 | 35.6 | 41.3 | 33.8 | 24.7 | 19.2 | 6.98 | 21.7 | 118 | ||||||
| √ | 51.2 | 45.0 | 40.1 | 35.0 | 41.1 | 33.4 | 24.6 | 18.9 | 7.56 | 23.2 | 149 | ||||||
| √ | 53.0 | 46.4 | 39.6 | 35.0 | 41.5 | 33.3 | 24.9 | 19.3 | 8.25 | 26.2 | 81 | ||||||
| √ | √ | 57.7 | 49.5 | 47.1 | 40.8 | 49.2 | 39.4 | 30.4 | 22.6 | 4.59 | 49.9 | 123 | |||||
| √ | √ | √ | 56.9 | 50.1 | 47.7 | 40.9 | 49.8 | 40.2 | 31.0 | 23.4 | 4.18 | 51.9 | 134 | ||||
| √ | √ | √ | √ | 61.5 | 53.4 | 50.2 | 42.1 | 53.3 | 42.1 | 33.2 | 24.7 | 5.51 | 72.6 | 79 | |||
Table 4 Ablation experiments
| 改进主 干网络 | DCF-FPN | CSDUS | e2e-DyHead | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% | 参数量/M | GFLOPs | FPS | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Val | Test | Val | Test | Val | Test | Val | Test | ||||||||||
| 51.7 | 44.5 | 38.8 | 35.0 | 40.6 | 32.8 | 24.2 | 18.6 | 7.22 | 21.4 | 153 | |||||||
| √ | 53.9 | 47.8 | 43.8 | 38.0 | 45.2 | 36.9 | 27.4 | 21.0 | 2.21 | 25.7 | 154 | ||||||
| √ | 51.6 | 45.4 | 40.0 | 35.6 | 41.3 | 33.8 | 24.7 | 19.2 | 6.98 | 21.7 | 118 | ||||||
| √ | 51.2 | 45.0 | 40.1 | 35.0 | 41.1 | 33.4 | 24.6 | 18.9 | 7.56 | 23.2 | 149 | ||||||
| √ | 53.0 | 46.4 | 39.6 | 35.0 | 41.5 | 33.3 | 24.9 | 19.3 | 8.25 | 26.2 | 81 | ||||||
| √ | √ | 57.7 | 49.5 | 47.1 | 40.8 | 49.2 | 39.4 | 30.4 | 22.6 | 4.59 | 49.9 | 123 | |||||
| √ | √ | √ | 56.9 | 50.1 | 47.7 | 40.9 | 49.8 | 40.2 | 31.0 | 23.4 | 4.18 | 51.9 | 134 | ||||
| √ | √ | √ | √ | 61.5 | 53.4 | 50.2 | 42.1 | 53.3 | 42.1 | 33.2 | 24.7 | 5.51 | 72.6 | 79 | |||
| G | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|---|---|
| 2 | 61.1 | 50.2 | 52.8 | 32.9 |
| 4 | 61.5 | 49.1 | 52.8 | 32.8 |
| 8 | 60.8 | 50.2 | 52.8 | 33.0 |
| 16 | 61.9 | 49.1 | 52.6 | 32.9 |
| 32 | 60.3 | 49.6 | 52.5 | 32.7 |
| 64 | 60.7 | 50.1 | 52.9 | 33.1 |
| 128 | 61.5 | 50.2 | 53.3 | 33.2 |
Table 5 Ablation experiment of CSDUS module
| G | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|---|---|
| 2 | 61.1 | 50.2 | 52.8 | 32.9 |
| 4 | 61.5 | 49.1 | 52.8 | 32.8 |
| 8 | 60.8 | 50.2 | 52.8 | 33.0 |
| 16 | 61.9 | 49.1 | 52.6 | 32.9 |
| 32 | 60.3 | 49.6 | 52.5 | 32.7 |
| 64 | 60.7 | 50.1 | 52.9 | 33.1 |
| 128 | 61.5 | 50.2 | 53.3 | 33.2 |
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% | Para/M | GFLOPs |
|---|---|---|---|---|
| YOLOv5s | 39.8 | 23.9 | 9.12 | 23.8 |
| YOLOv8s | 40.2 | 24.1 | 11.13 | 28.5 |
| YOLOv10n | 34.8 | 20.1 | 2.27 | 6.5 |
| YOLOv10s | 40.6 | 24.2 | 7.22 | 21.4 |
| YOLOv10m | 43.8 | 26.7 | 15.32 | 58.9 |
| YOLOv10l | 46.8 | 28.7 | 24.32 | 120.0 |
| CMS-YOLOv7[ | 52.3 | 30.7 | 17.99 | 166 |
| HSP-YOLOv8[ | 49.6 | 32.9 | 11.5 | 50.0 |
| BDH-YOLO[ | 42.9 | 26.2 | 9.39 | - |
| ARB-YOLOv8[ | 48.6 | 30.1 | 13.4 | 43.4 |
| Ours | 53.3 | 33.2 | 5.51 | 72.6 |
Table 6 Comparison experiments of models based on VisDrone2019 data set
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% | Para/M | GFLOPs |
|---|---|---|---|---|
| YOLOv5s | 39.8 | 23.9 | 9.12 | 23.8 |
| YOLOv8s | 40.2 | 24.1 | 11.13 | 28.5 |
| YOLOv10n | 34.8 | 20.1 | 2.27 | 6.5 |
| YOLOv10s | 40.6 | 24.2 | 7.22 | 21.4 |
| YOLOv10m | 43.8 | 26.7 | 15.32 | 58.9 |
| YOLOv10l | 46.8 | 28.7 | 24.32 | 120.0 |
| CMS-YOLOv7[ | 52.3 | 30.7 | 17.99 | 166 |
| HSP-YOLOv8[ | 49.6 | 32.9 | 11.5 | 50.0 |
| BDH-YOLO[ | 42.9 | 26.2 | 9.39 | - |
| ARB-YOLOv8[ | 48.6 | 30.1 | 13.4 | 43.4 |
| Ours | 53.3 | 33.2 | 5.51 | 72.6 |
| 模型 | 行人/% | 人类/% | 自行车/% | 汽车/% | 小型货车/ % | 卡车/% | 三轮车/% | 遮阳篷三 轮车/% | 公交车/% | 摩托/% |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOv5s | 43.1 | 34.0 | 12.8 | 79.9 | 45.2 | 38.5 | 27.7 | 15.5 | 56.0 | 45.5 |
| YOLOv8s | 44.3 | 34.1 | 13.8 | 80.1 | 45.7 | 36.7 | 28.1 | 17.2 | 57.0 | 44.9 |
| YOLOv10n | 37.6 | 30.0 | 11.1 | 76.7 | 38.4 | 29.4 | 22.6 | 13.0 | 49.4 | 40.1 |
| YOLOv10s | 43.8 | 34.6 | 14.9 | 80.4 | 45.7 | 37.0 | 29.2 | 16.5 | 57.6 | 46.3 |
| YOLOv10m | 47.8 | 37.9 | 19.0 | 82.1 | 48.6 | 40.0 | 34.1 | 17.3 | 61.1 | 50.2 |
| YOLOv10l | 50.4 | 39.5 | 20.5 | 83.3 | 51.2 | 47.1 | 36.6 | 18.9 | 67.2 | 53.3 |
| HSP-YOLOv8[ | 57.4 | 49.0 | 24.9 | 84.2 | 54.2 | 46.5 | 37.6 | 22.6 | 64.3 | 55.3 |
| ARB-YOLOv8[ | 56.8 | 46.7 | 21.2 | 86.2 | 53.4 | 42.6 | 35.2 | 20.7 | 66.3 | 56.9 |
| Ours | 60.8 | 49.2 | 28.3 | 87.7 | 56.1 | 48.9 | 42.0 | 26.2 | 71.5 | 62.0 |
Table 7 Comparison experiments of various categories based on VisDrone2019 data set
| 模型 | 行人/% | 人类/% | 自行车/% | 汽车/% | 小型货车/ % | 卡车/% | 三轮车/% | 遮阳篷三 轮车/% | 公交车/% | 摩托/% |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOv5s | 43.1 | 34.0 | 12.8 | 79.9 | 45.2 | 38.5 | 27.7 | 15.5 | 56.0 | 45.5 |
| YOLOv8s | 44.3 | 34.1 | 13.8 | 80.1 | 45.7 | 36.7 | 28.1 | 17.2 | 57.0 | 44.9 |
| YOLOv10n | 37.6 | 30.0 | 11.1 | 76.7 | 38.4 | 29.4 | 22.6 | 13.0 | 49.4 | 40.1 |
| YOLOv10s | 43.8 | 34.6 | 14.9 | 80.4 | 45.7 | 37.0 | 29.2 | 16.5 | 57.6 | 46.3 |
| YOLOv10m | 47.8 | 37.9 | 19.0 | 82.1 | 48.6 | 40.0 | 34.1 | 17.3 | 61.1 | 50.2 |
| YOLOv10l | 50.4 | 39.5 | 20.5 | 83.3 | 51.2 | 47.1 | 36.6 | 18.9 | 67.2 | 53.3 |
| HSP-YOLOv8[ | 57.4 | 49.0 | 24.9 | 84.2 | 54.2 | 46.5 | 37.6 | 22.6 | 64.3 | 55.3 |
| ARB-YOLOv8[ | 56.8 | 46.7 | 21.2 | 86.2 | 53.4 | 42.6 | 35.2 | 20.7 | 66.3 | 56.9 |
| Ours | 60.8 | 49.2 | 28.3 | 87.7 | 56.1 | 48.9 | 42.0 | 26.2 | 71.5 | 62.0 |
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|
| YOLOv5n | 62.3 | 35.8 |
| YOLOv5s | 68.6 | 45.3 |
| YOLOv8n | 65.7 | 42.4 |
| YOLOv8s | 70.3 | 48.3 |
| YOLOv10s | 71.6 | 49.1 |
| Ours | 78.2 | 54.1 |
Table 8 Comparison experiment of each model based on DOTA data set
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|
| YOLOv5n | 62.3 | 35.8 |
| YOLOv5s | 68.6 | 45.3 |
| YOLOv8n | 65.7 | 42.4 |
| YOLOv8s | 70.3 | 48.3 |
| YOLOv10s | 71.6 | 49.1 |
| Ours | 78.2 | 54.1 |

Fig.10 Comparison of target detection results
| [1] |
|
| [2] |
吴一全, 童康. 基于深度学习的无人机航拍图像小目标检测研究进展[J]. 航空学报, 2025, 46(3):181-207
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
冯迎宾, 郭枭尊, 晏佳华. 基于多尺度注意力机制的无人机小目标检测算法[J]. 兵工学报, 2025, 46(1):14-23.
|
|
|
|
| [12] |
赵海丽, 许修常, 潘宇航. 基于改进YOLOv7-tiny的车辆目标检测算法[J]. 兵工学报, 2025, 46(4):103-113.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
于傲泽, 魏维伟, 王平, 等. 基于分块复合注意力的无人机小目标检测算法[J]. 航空学报, 2024, 45(14):1-11.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
刘延芳, 佘佳宇, 袁秋帆, 等. 无人机遥感图像实时小目标检测方法[J]. 航空学报, 2024, 45(14):59-78.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [1] | CHEN Fawei, CHEN Song, WANG Sheng, LIU Chencheng, YUE Jiaying. A Method for UAV Cooperative Jamming Task Allocation based on HPSO Algorithm [J]. Acta Armamentarii, 2025, 46(S1): 250142-. |
| [2] | ZHAO Zhijie, SHEN Shiqi, YING Zhanfeng, LI Keting, LI Ruixing, TANG Shiwei. Aerial Vehicle Detection based on Multispectral Feature Fusion in Complex Scene [J]. Acta Armamentarii, 2025, 46(S1): 250413-. |
| [3] | YANG Zhilai, LI Kena, CHEN Zhaowen, LIU Rui. Design of Searching and positioning UAV System for Persons in Distress [J]. Acta Armamentarii, 2025, 46(S1): 250454-. |
| [4] | ZHANG Pei, ZHANG An, BI Wenhao, MAO Zeming. A Maneuver Strategy of UAV to Evade a Medium-long Range Air-to-air Missile in Terminal Guidance [J]. Acta Armamentarii, 2025, 46(9): 240972-. |
| [5] | ZHANG Yue, ZHANG Ning, XU Xiping, PAN Yue. UAV Trajectory Planning under Complex Constraints Based on GOTDBO Algorithm [J]. Acta Armamentarii, 2025, 46(8): 240997-. |
| [6] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [7] | ZHOU Le, YIN Qiaozhi, ZHONG Peilin, WEI Xiaohui, NIE Hong. Autonomous UAV Location Selection Technique Based on Data Fusion [J]. Acta Armamentarii, 2025, 46(8): 240751-. |
| [8] | SHEN Ying, ZHANG Shuo, WANG Shu, SU Yun, XUE Fang, HUANG Feng. A Method for Detecting the Camouflaged Small Target in Complex Scene Using Airborne Polarization Remote Sensing [J]. Acta Armamentarii, 2025, 46(7): 240797-. |
| [9] | XIAO Peng, YU Haixia, HUANG Long, ZHANG Siming. 3D Path Planning of Unmanned Aerial Vehicle Based on MDEPSO Algorithm [J]. Acta Armamentarii, 2025, 46(7): 240710-. |
| [10] | XU Yang, WEI Chao, FENG Fuyong, HU Leyun. Autonomous Landing of UAVs based on Spatio-temporal Decomposition Planning [J]. Acta Armamentarii, 2025, 46(7): 240653-. |
| [11] | WANG Weihan, GAO Mingze, SHI Xiaolong, HU Shiyuan, WU Yanjiang, CHEN Huimin. Modeling and Verification of Dynamic Imaging of UAV-borne Line-array LiDAR [J]. Acta Armamentarii, 2025, 46(6): 240836-. |
| [12] | YAN Xiaojia, ZHU Huimin, SUN Shiyan, SHI Zhangsong, JIANG Shang. An Improved Mutant Firefly Algorithm Optimized Particle Filter Algorithm for UAV Target Positioning [J]. Acta Armamentarii, 2025, 46(5): 240549-. |
| [13] | SUN Dianxing, DOU Yuecong, PENG Ruihui, DONG Yunlong, GUO Wei. An Intelligent Corner Reflector Recognition Algorithm Based on Radar-infrared Imaging Feature-level Fusion [J]. Acta Armamentarii, 2025, 46(5): 240501-. |
| [14] | ZHOU Zhenlin, LONG Teng, LIU Dawei, SUN Jingliang, ZHONG Jianxin, LI Junzhi. Path Planning Method for Large-scale UAV Swarms Based on Reinforcement Learning Conflict Resolution [J]. Acta Armamentarii, 2025, 46(5): 241146-. |
| [15] | HE Ziqi, LI Bochen, WANG Chenggang, SONG Lei. Multi-UAV Sequential Capture Algorithm for Area Defense [J]. Acta Armamentarii, 2025, 46(4): 240343-. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||