
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250189-.doi: 10.12382/bgxb.2025.0189
Previous Articles Next Articles
LU Junjie, ZOU Quan*( ), CHEN Longmiao
), CHEN Longmiao
Received:2025-03-19
Online:2025-11-27
Contact:
ZOU Quan
CLC Number:
LU Junjie, ZOU Quan, CHEN Longmiao. Nonlinear Dynamic Modeling and Analysis of Chain Rotational Shell Magazine[J]. Acta Armamentarii, 2025, 46(11): 250189-.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Chain rotational shell magazine
Fig.2 Reducer structure layout diagram
Fig.3 Chain transmission mechanism with guide rail constraint layout diagram
Fig.4 Chain transmission mechanism with guide rail constraint schematic diagram
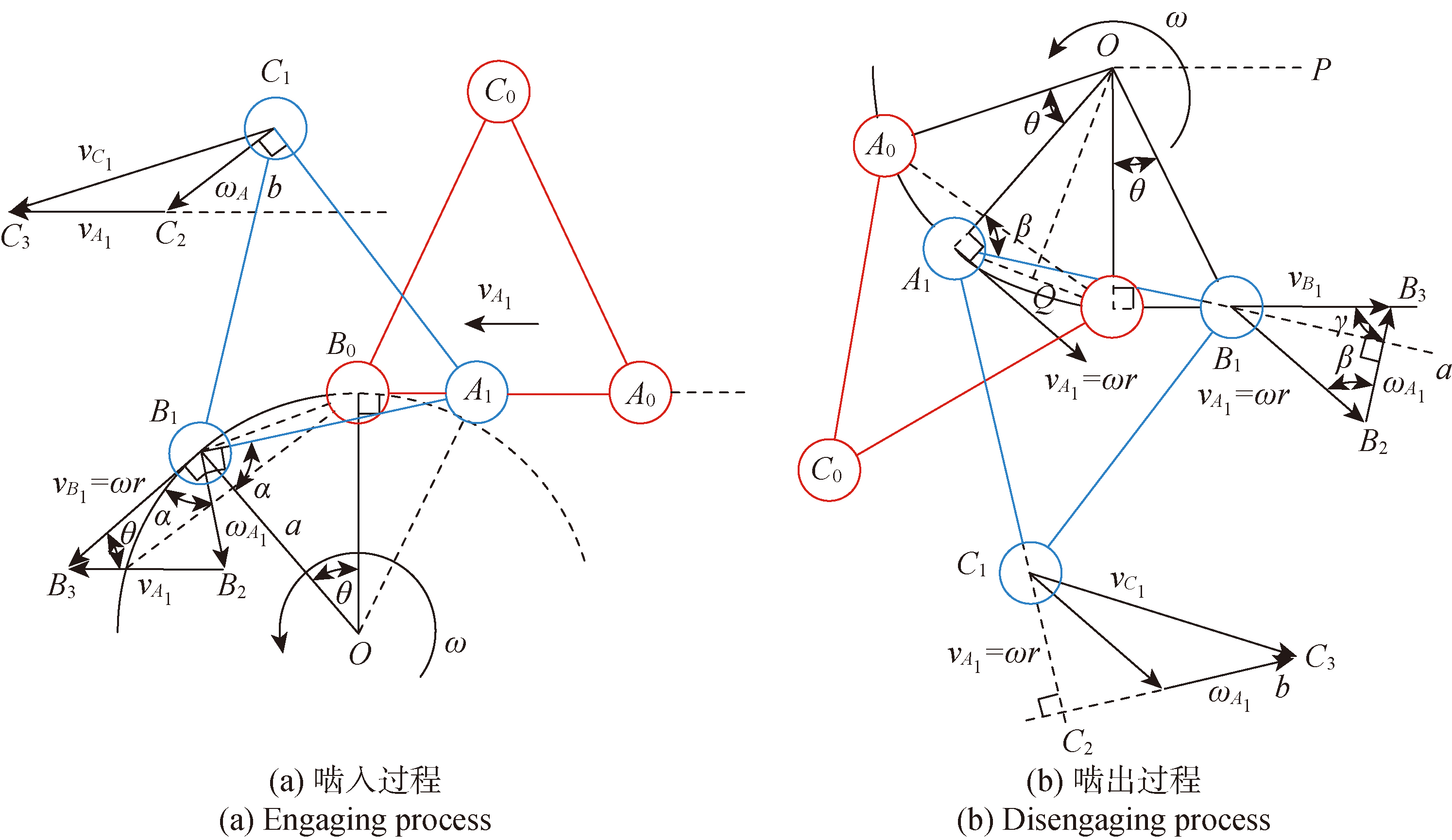
Fig.5 Shell engagement and disengagement planar motion diagram
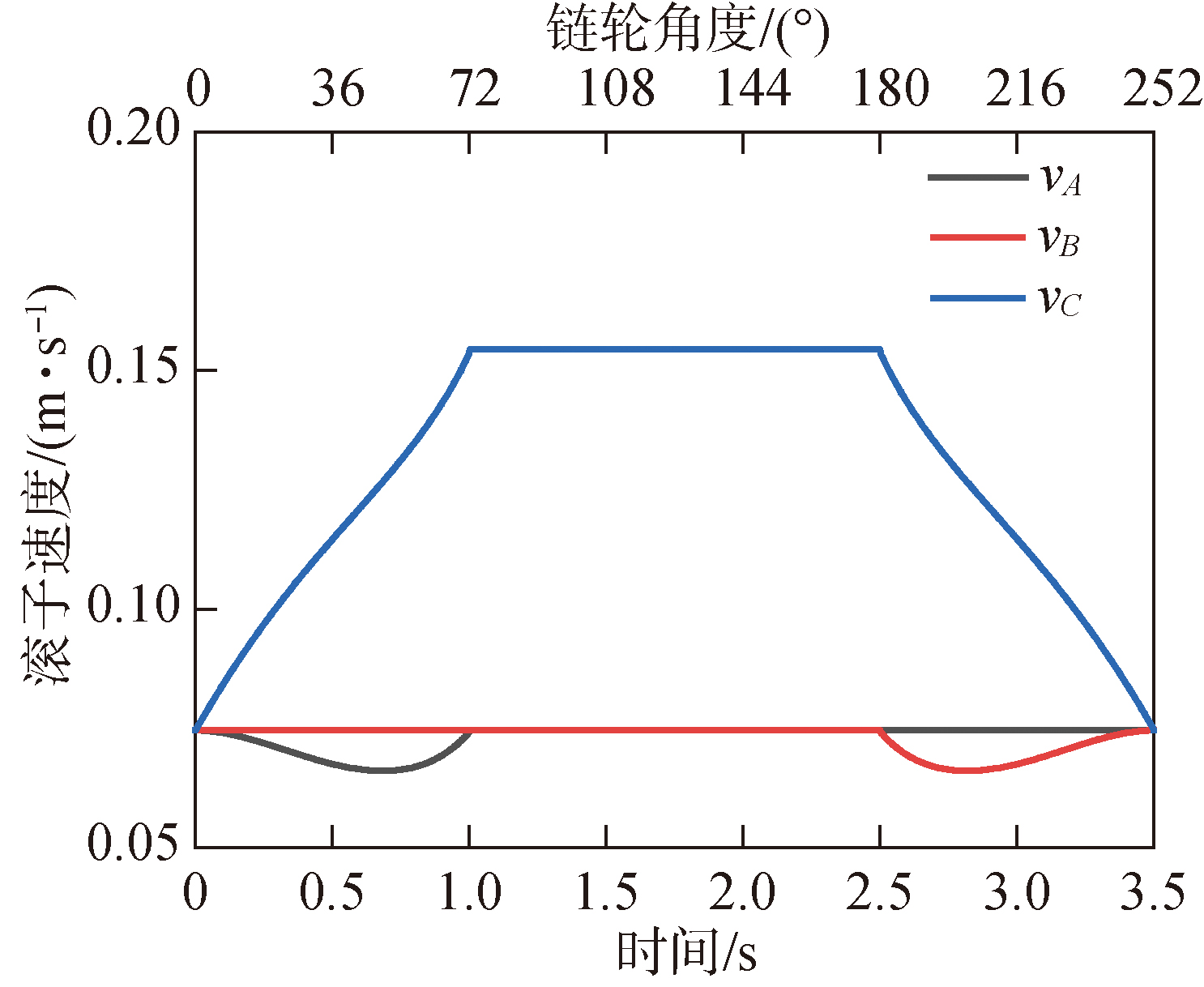
Fig.6 Velocity-time graph
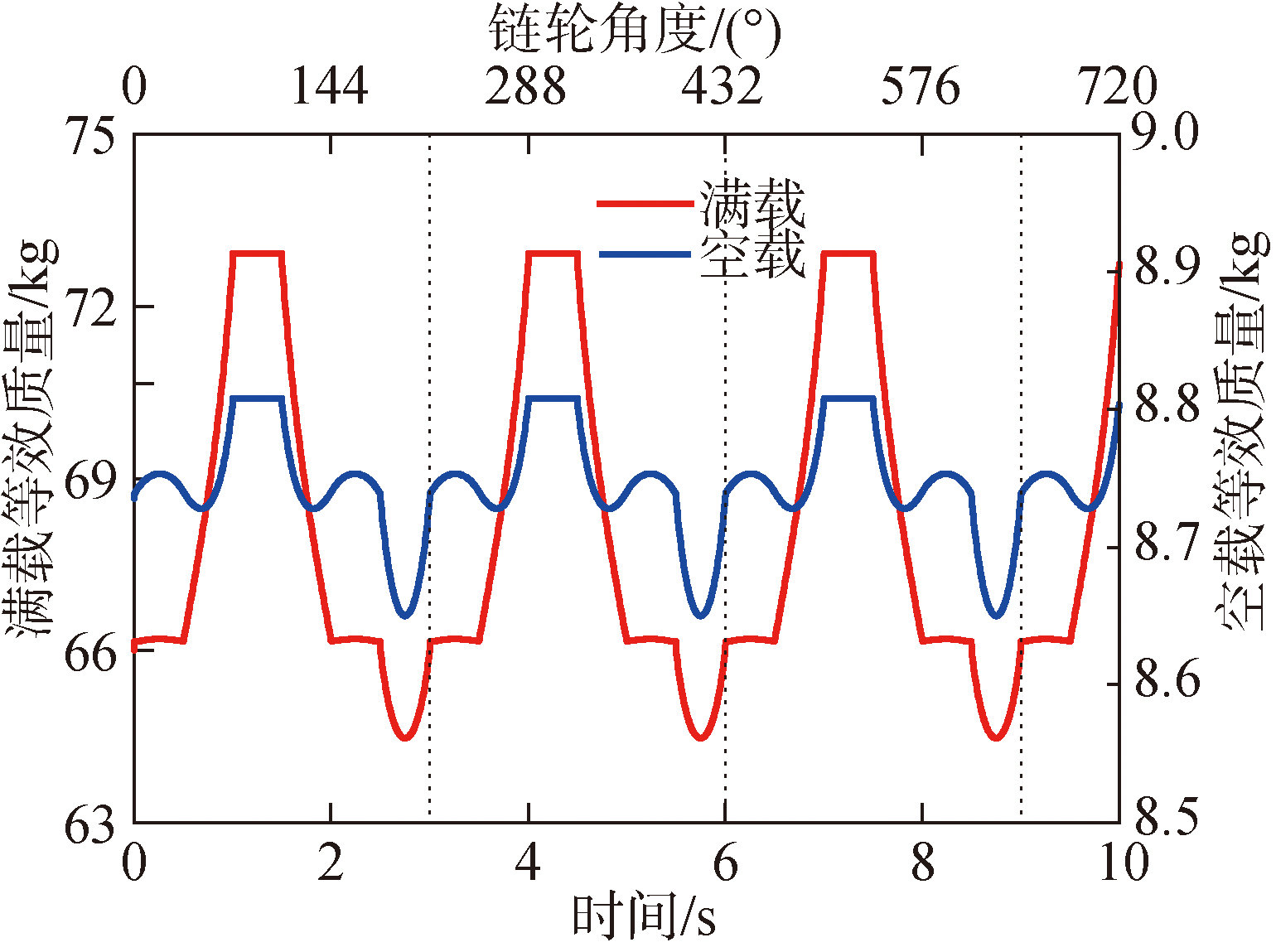
Fig.7 Shell equivalent mass-position graph

Fig.8 Chain rotational shell magazine input and output diagram
| 参数 | 搜索范围 |
|---|---|
| 电机与小齿轮等效转动惯量Jm/(kg·m2) | [10-4,10-3] |
| 大齿轮、链轮及传动轴等效转动惯量Jc/(kg·m2) | [10-2,1] |
| 电机端静摩擦力矩Tcm/(N·m) | [5×10-4,10-3] |
| 电机端库伦摩擦力矩Tsm/(N·m) | [0.01,0.20] |
| 电机端黏性摩擦系数kfm/(N·m·s) | [10-4,2×10-3] |
| 负载端静摩擦力矩Tcl/(N·m) | [1,10] |
| 负载端库伦摩擦力矩Tsl/(N·m) | [Tcl,10] |
| 负载端黏性摩擦系数kfl/(N·m·s) | [0.01,0.20] |
Table 1 Parameters to be identified and their ranges
| 参数 | 搜索范围 |
|---|---|
| 电机与小齿轮等效转动惯量Jm/(kg·m2) | [10-4,10-3] |
| 大齿轮、链轮及传动轴等效转动惯量Jc/(kg·m2) | [10-2,1] |
| 电机端静摩擦力矩Tcm/(N·m) | [5×10-4,10-3] |
| 电机端库伦摩擦力矩Tsm/(N·m) | [0.01,0.20] |
| 电机端黏性摩擦系数kfm/(N·m·s) | [10-4,2×10-3] |
| 负载端静摩擦力矩Tcl/(N·m) | [1,10] |
| 负载端库伦摩擦力矩Tsl/(N·m) | [Tcl,10] |
| 负载端黏性摩擦系数kfl/(N·m·s) | [0.01,0.20] |
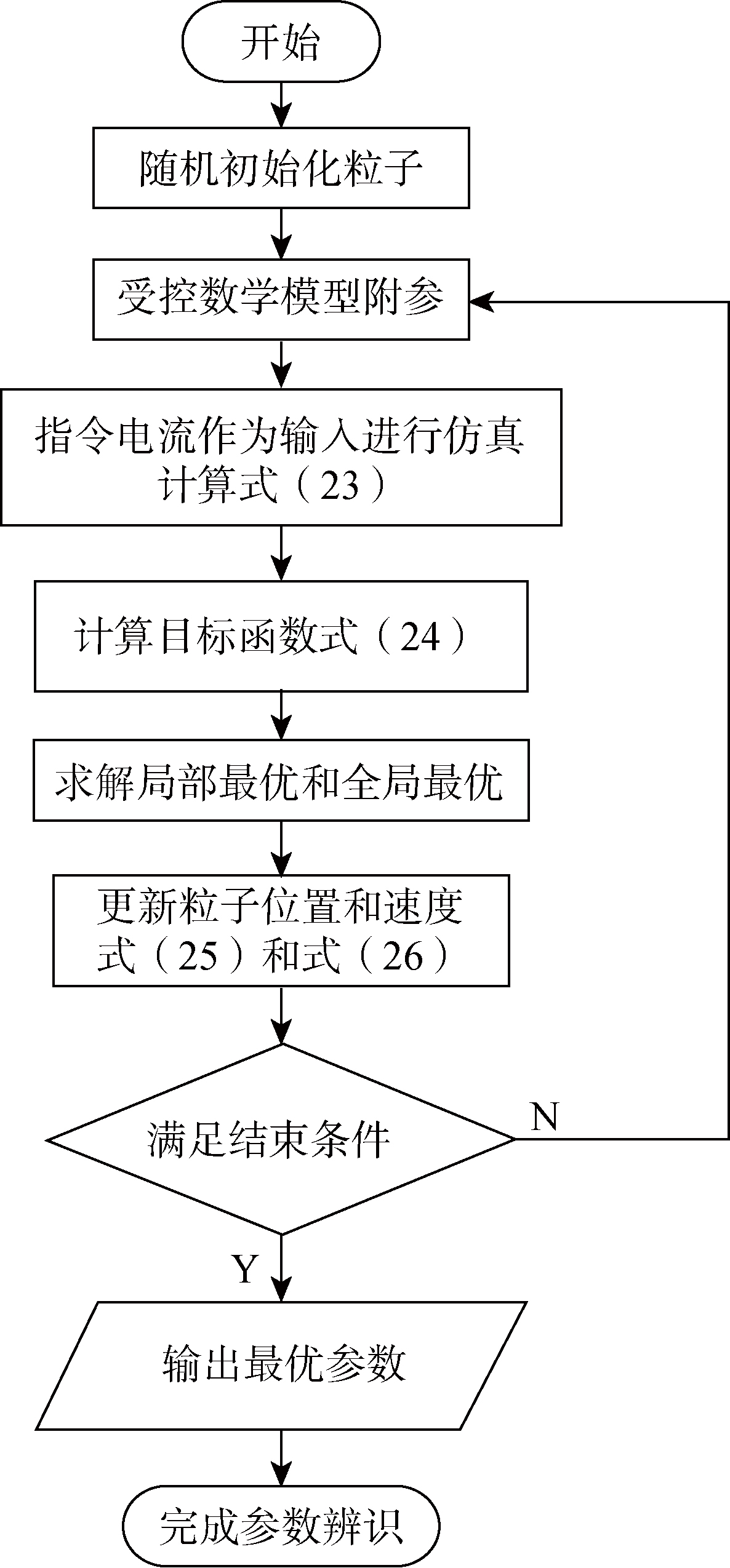
Fig.9 Flowchart of shell magazine parameter identification based on PSO
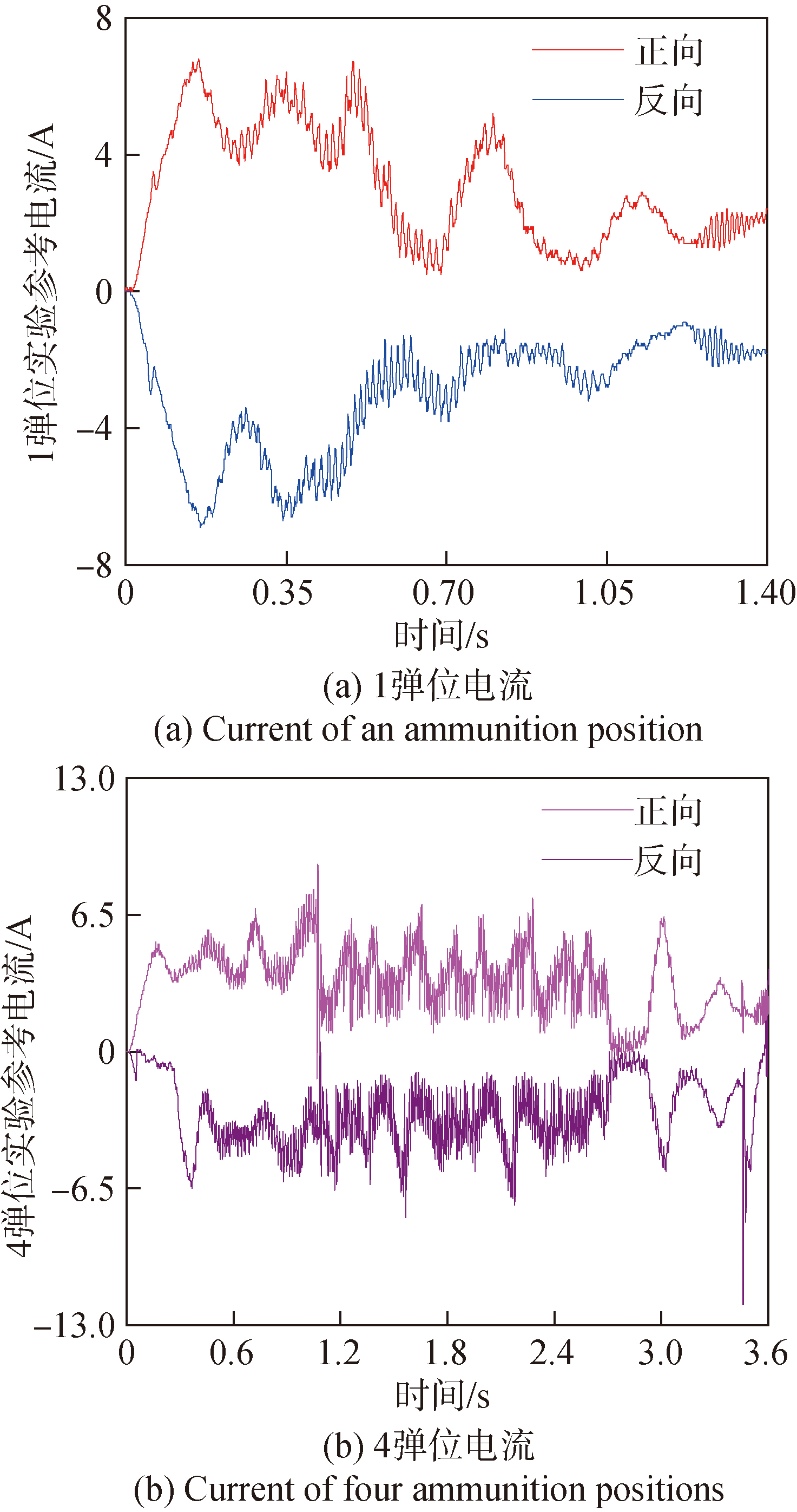
Fig.10 Experimental current curve

Fig.11 Objective function and iteration parameters to be identified graph
| 参数 | 第1组 | 第2组 | 第3组 | 平均值 |
|---|---|---|---|---|
| Jm/(kg·m2) | 2.31×10-4 | 1.47×10-4 | 9.24×10-4 | 4.34×10-4 |
| Jc/(kg·m2) | 0.0311 | 0.0546 | 0.0181 | 0.0346 |
| Tcm/(N·m) | 9.9×10-4 | 7.0×10-4 | 7.1×10-4 | 8.0×10-4 |
| Tsm/(N·m) | 0.062 | 0.150 | 0.088 | 0.100 |
| kfm/(N·m·s) | 9.5×10-4 | 11.2×10-4 | 9.3×10-4 | 1.0×10-3 |
| Tcl/(N·m) | 4.28 | 4.73 | 5.39 | 4.80 |
| Tsl/(N·m) | 4.64 | 5.09 | 5.57 | 5.10 |
| kfl/(N·m·s) | 0.09 | 0.10 | 0.14 | 0.11 |
Table 2 Parameter identification results
| 参数 | 第1组 | 第2组 | 第3组 | 平均值 |
|---|---|---|---|---|
| Jm/(kg·m2) | 2.31×10-4 | 1.47×10-4 | 9.24×10-4 | 4.34×10-4 |
| Jc/(kg·m2) | 0.0311 | 0.0546 | 0.0181 | 0.0346 |
| Tcm/(N·m) | 9.9×10-4 | 7.0×10-4 | 7.1×10-4 | 8.0×10-4 |
| Tsm/(N·m) | 0.062 | 0.150 | 0.088 | 0.100 |
| kfm/(N·m·s) | 9.5×10-4 | 11.2×10-4 | 9.3×10-4 | 1.0×10-3 |
| Tcl/(N·m) | 4.28 | 4.73 | 5.39 | 4.80 |
| Tsl/(N·m) | 4.64 | 5.09 | 5.57 | 5.10 |
| kfl/(N·m·s) | 0.09 | 0.10 | 0.14 | 0.11 |
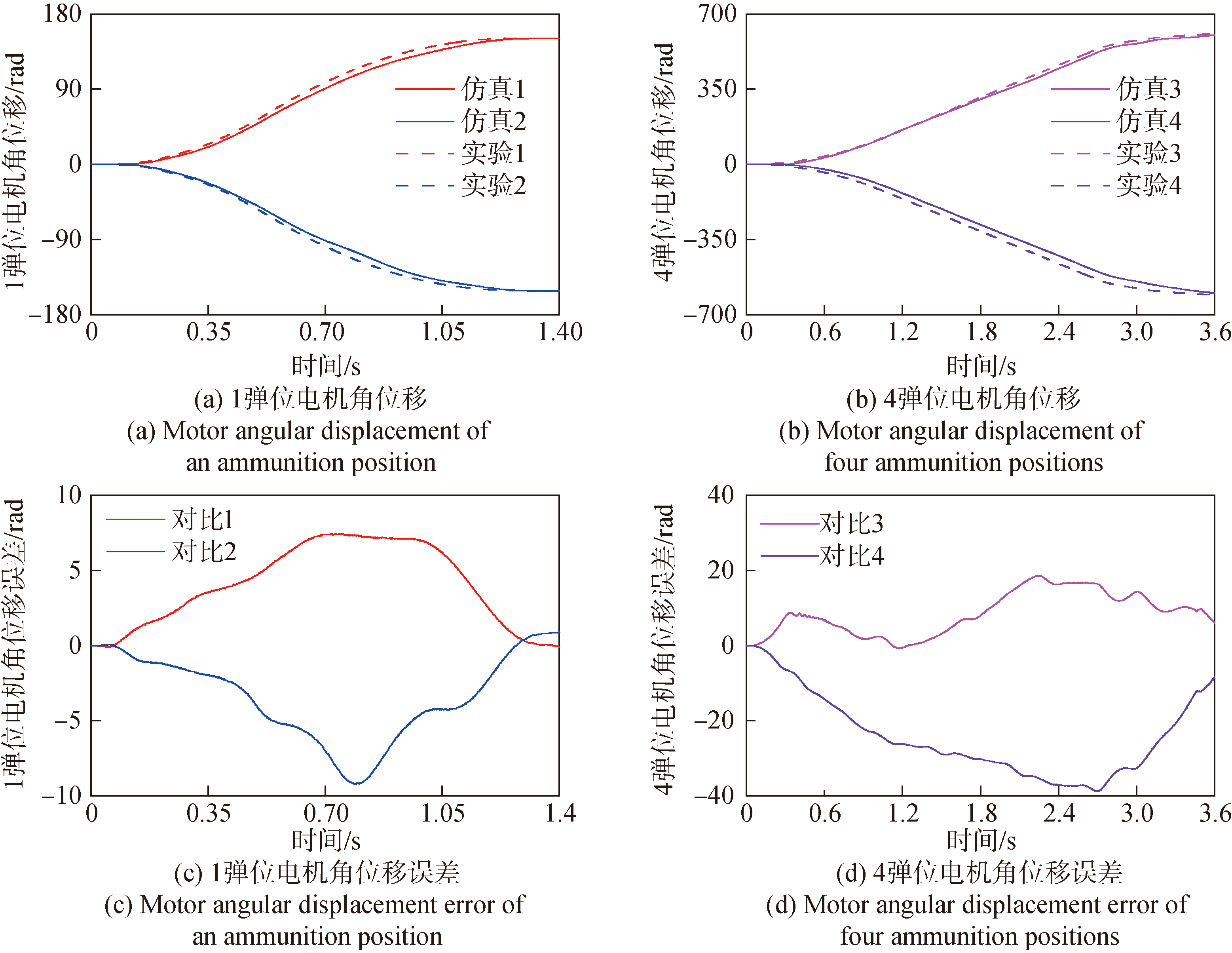
Fig.12 Comparison of dynamic model simulation and experiment
| 实验序号 | 最大误差 emax/rad | 稳态绝对 误差 | 稳态相对 误差 | 拟合系数 R2/% |
|---|---|---|---|---|
| 实验1.1 | -7.4675 | 1.0414 | 0.6912 | 99.6506 |
| 实验1.2 | -12.2467 | -6.9276 | -4.5921 | 98.2065 |
| 实验1.3 | -7.8050 | -2.6598 | -1.7624 | 99.5014 |
| 实验1.4 | -4.3804 | 3.4572 | 2.2945 | 99.7902 |
| 实验1.5 | -11.6930 | -7.7595 | -5.1371 | 98.0965 |
| 实验1.6 | 5.8190 | 5.8137 | 3.8601 | 99.5074 |
| 实验1.7 | -8.8883 | 0.9115 | 0.6044 | 99.5643 |
| 实验2.1 | 6.9315 | 1.7702 | -1.1748 | 99.5000 |
| 实验2.2 | 9.8886 | 5.3970 | -3.5790 | 98.8713 |
| 实验2.3 | 7.4316 | -0.0147 | 0.0097 | 99.4898 |
| 实验2.4 | 11.8154 | 1.3188 | -0.8735 | 98.7416 |
| 实验2.5 | 5.5125 | 2.3613 | -1.5679 | 99.7556 |
| 实验2.6 | 9.5461 | 2.5017 | -1.6597 | 99.2255 |
| 实验2.7 | 4.0714 | -0.6637 | 0.4400 | 99.8643 |
| 实验3.1 | -38.0032 | -36.2566 | 5.9717 | 99.5456 |
| 实验3.2 | -18.5883 | -4.9677 | 0.8182 | 99.8738 |
| 实验3.3 | 20.3553 | -16.3835 | 2.6984 | 99.8053 |
| 实验4.1 | 48.3395 | 26.2945 | -4.3309 | 98.4226 |
| 实验4.2 | 34.5661 | 10.4529 | -1.7216 | 99.2000 |
| 实验4.3 | 41.4654 | 5.1592 | -0.8497 | 99.024 7 |
Table 3 Model validation results
| 实验序号 | 最大误差 emax/rad | 稳态绝对 误差 | 稳态相对 误差 | 拟合系数 R2/% |
|---|---|---|---|---|
| 实验1.1 | -7.4675 | 1.0414 | 0.6912 | 99.6506 |
| 实验1.2 | -12.2467 | -6.9276 | -4.5921 | 98.2065 |
| 实验1.3 | -7.8050 | -2.6598 | -1.7624 | 99.5014 |
| 实验1.4 | -4.3804 | 3.4572 | 2.2945 | 99.7902 |
| 实验1.5 | -11.6930 | -7.7595 | -5.1371 | 98.0965 |
| 实验1.6 | 5.8190 | 5.8137 | 3.8601 | 99.5074 |
| 实验1.7 | -8.8883 | 0.9115 | 0.6044 | 99.5643 |
| 实验2.1 | 6.9315 | 1.7702 | -1.1748 | 99.5000 |
| 实验2.2 | 9.8886 | 5.3970 | -3.5790 | 98.8713 |
| 实验2.3 | 7.4316 | -0.0147 | 0.0097 | 99.4898 |
| 实验2.4 | 11.8154 | 1.3188 | -0.8735 | 98.7416 |
| 实验2.5 | 5.5125 | 2.3613 | -1.5679 | 99.7556 |
| 实验2.6 | 9.5461 | 2.5017 | -1.6597 | 99.2255 |
| 实验2.7 | 4.0714 | -0.6637 | 0.4400 | 99.8643 |
| 实验3.1 | -38.0032 | -36.2566 | 5.9717 | 99.5456 |
| 实验3.2 | -18.5883 | -4.9677 | 0.8182 | 99.8738 |
| 实验3.3 | 20.3553 | -16.3835 | 2.6984 | 99.8053 |
| 实验4.1 | 48.3395 | 26.2945 | -4.3309 | 98.4226 |
| 实验4.2 | 34.5661 | 10.4529 | -1.7216 | 99.2000 |
| 实验4.3 | 41.4654 | 5.1592 | -0.8497 | 99.024 7 |
| 参数 | 标称值 | 变化范围 | 备注 |
|---|---|---|---|
| Ld/H | 0.0032 | [0.0016,0.0064] | 电机d轴的电感 |
| Lq/H | 0.0032 | [0.0016,0.0064] | 电机q轴的电感 |
| φf/Wb | 0.1 | [0.085,0.115] | 电机永磁体磁链 |
| R/Ω | 0.92 | [0.46,1.84] | 电机定子绕组电阻 |
| kfm/(N·m·s) | 0.001 | [0.0005,0.002] | 电机端黏性摩擦系数 |
| Tcm/(N·m) | 0.0008 | [0.0004,0.0016] | 电机端库伦摩擦力矩 |
| Tsm/(N·m) | 0.1 | [0.05,0.2] | 电机端静摩擦力矩 |
| Jm/(kg·m2) | 0.00043364 | [0.0002, 0.0006] | 电机及小齿轮等效转动惯量 |
| Jc/(kg·m2) | 0.0346 | [0.0173, 0.0692] | 大齿轮、链轮及传动轴等效转动惯量 |
| mC/kg | 45 | 0,45 | 弹丸质量 |
| jc/rad | 0.013 | [0.0065,0.026] | 齿轮啮合间隙的一半 |
| jl/rad | 0.001 | [0.0005,0.002] | 链轮滚子间隙的一半 |
| kfl/(N·m·s) | 0.11 | [0.055,0.22] | 负载端黏性摩擦系数 |
| Tcl/(N·m) | 4.8 | [2.4,9.6] | 负载端库伦摩擦力矩 |
| Tsl/(N·m) | 5.1 | [Tcl,10.2] | 负载端静摩擦力矩 |
| k/(N·m-1) | 2×108 | [1×108,4×108] | 链节等效刚度 |
| kc/(N·m) | 3×105 | [1×105,9×105] | 齿轮等效传动刚度 |
Table 4 Parameters to be analyzed and their ranges
| 参数 | 标称值 | 变化范围 | 备注 |
|---|---|---|---|
| Ld/H | 0.0032 | [0.0016,0.0064] | 电机d轴的电感 |
| Lq/H | 0.0032 | [0.0016,0.0064] | 电机q轴的电感 |
| φf/Wb | 0.1 | [0.085,0.115] | 电机永磁体磁链 |
| R/Ω | 0.92 | [0.46,1.84] | 电机定子绕组电阻 |
| kfm/(N·m·s) | 0.001 | [0.0005,0.002] | 电机端黏性摩擦系数 |
| Tcm/(N·m) | 0.0008 | [0.0004,0.0016] | 电机端库伦摩擦力矩 |
| Tsm/(N·m) | 0.1 | [0.05,0.2] | 电机端静摩擦力矩 |
| Jm/(kg·m2) | 0.00043364 | [0.0002, 0.0006] | 电机及小齿轮等效转动惯量 |
| Jc/(kg·m2) | 0.0346 | [0.0173, 0.0692] | 大齿轮、链轮及传动轴等效转动惯量 |
| mC/kg | 45 | 0,45 | 弹丸质量 |
| jc/rad | 0.013 | [0.0065,0.026] | 齿轮啮合间隙的一半 |
| jl/rad | 0.001 | [0.0005,0.002] | 链轮滚子间隙的一半 |
| kfl/(N·m·s) | 0.11 | [0.055,0.22] | 负载端黏性摩擦系数 |
| Tcl/(N·m) | 4.8 | [2.4,9.6] | 负载端库伦摩擦力矩 |
| Tsl/(N·m) | 5.1 | [Tcl,10.2] | 负载端静摩擦力矩 |
| k/(N·m-1) | 2×108 | [1×108,4×108] | 链节等效刚度 |
| kc/(N·m) | 3×105 | [1×105,9×105] | 齿轮等效传动刚度 |
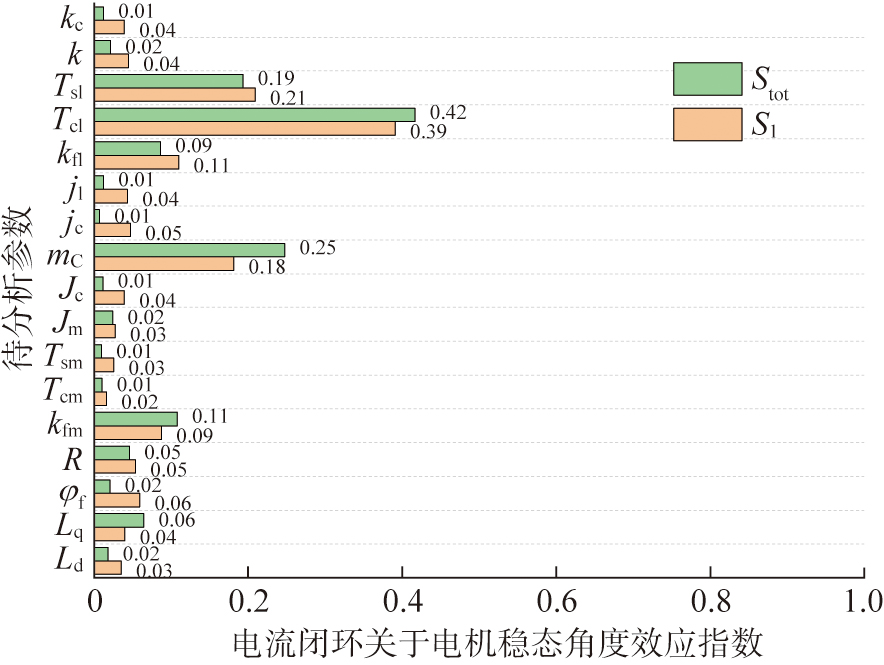
Fig.13 Results of current closed-loop sensitivity analysis
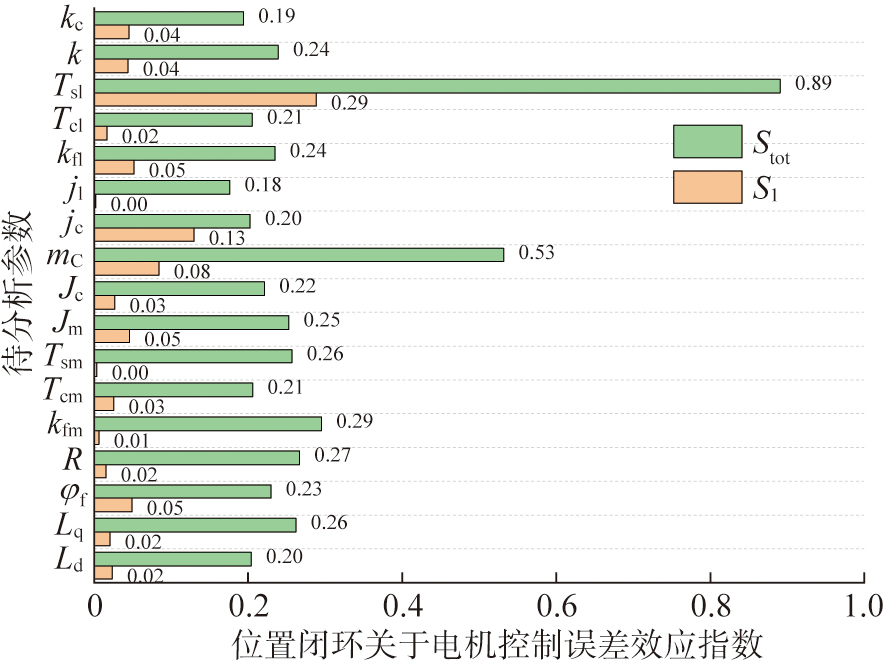
Fig.14 Results of position closed-loop sensitivity analysis
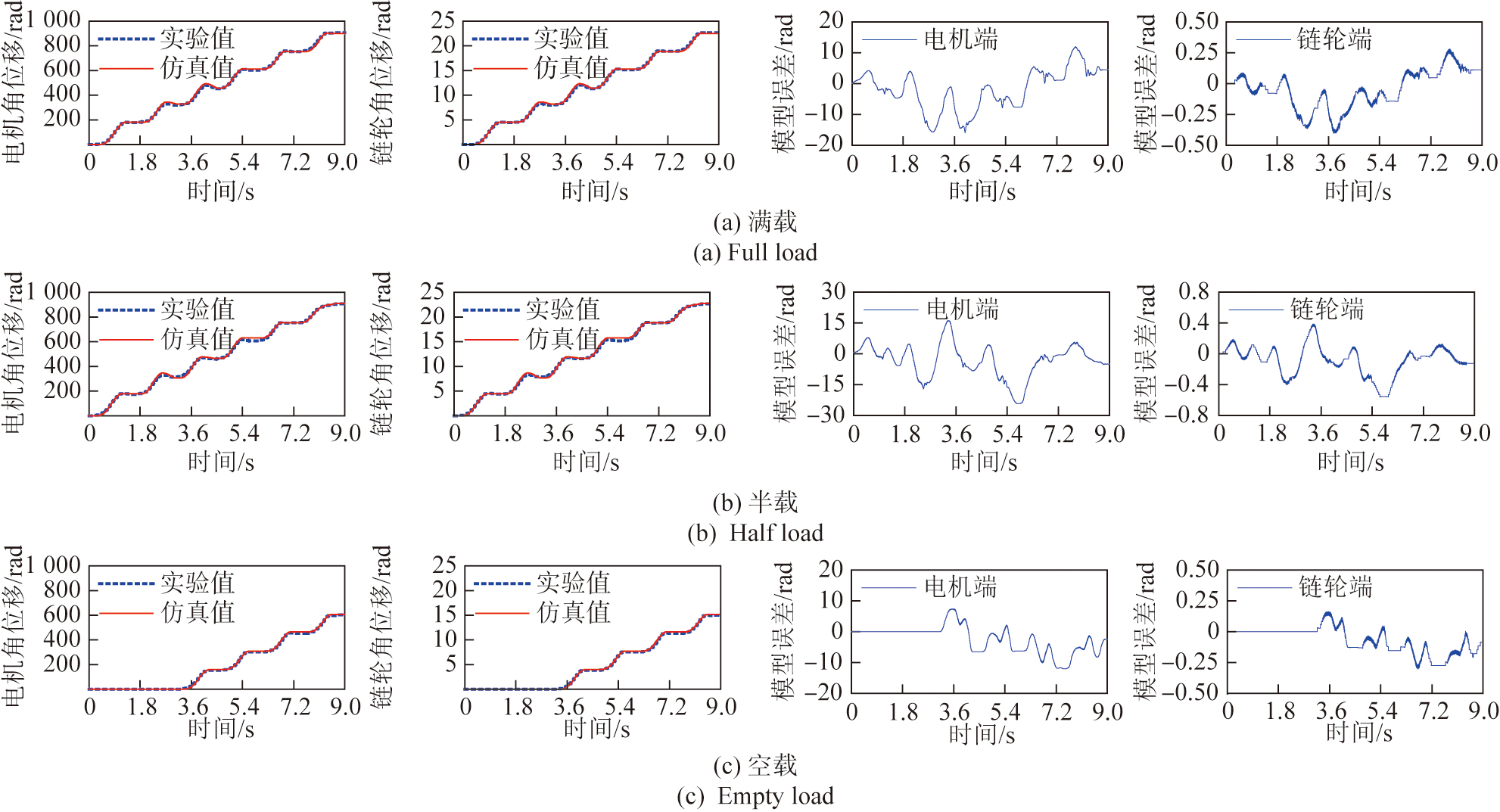
Fig.15 Comparison of simulation and experimental results of reduced-order mathematical models
| 装载 情况 | 电机与链 轮角度 | 最大误差 emax/rad | 稳态绝对 误差 | (1弹位)稳态相对 误差 |
|---|---|---|---|---|
| 满载 | 电机角度 | -15.8234 | 4.5225 | 2.9976 |
| 链轮角度 | -0.4019 | 0.1119 | 2.9670 | |
| 半载 | 电机角度 | -24.1395 | -4.9115 | -3.2562 |
| 链轮角度 | -0.5601 | -0.1252 | -3.3204 | |
| 空载 | 电机角度 | -11.9442 | -2.4508 | -1.6244 |
| 链轮角度 | -0.3032 | -0.0850 | -2.2564 |
Table 5 Model validation results
| 装载 情况 | 电机与链 轮角度 | 最大误差 emax/rad | 稳态绝对 误差 | (1弹位)稳态相对 误差 |
|---|---|---|---|---|
| 满载 | 电机角度 | -15.8234 | 4.5225 | 2.9976 |
| 链轮角度 | -0.4019 | 0.1119 | 2.9670 | |
| 半载 | 电机角度 | -24.1395 | -4.9115 | -3.2562 |
| 链轮角度 | -0.5601 | -0.1252 | -3.3204 | |
| 空载 | 电机角度 | -11.9442 | -2.4508 | -1.6244 |
| 链轮角度 | -0.3032 | -0.0850 | -2.2564 |
| [1] |
侯保林, 樵军谋, 刘琮敏. 火炮自动装填[M]. 北京: 兵器工业出版社, 2010.
|
|
|
|
| [2] |
陈冬, 钱林方, 陈志群, 等. 基于改进拟连续算法的回转弹仓位置控制[J]. 兵工学报, 2024, 45(5):1436-1448.
doi: 10.12382/bgxb.2023.0064 |
|
doi: 10.12382/bgxb.2023.0064 |
|
| [3] |
范鑫. 基于参数辨识的链式回转弹仓控制技术研究[D]. 南京: 南京理工大学, 2021.
|
|
|
|
| [4] |
姚来鹏, 侯保林, 刘曦, 等. 基于非线性干扰观测器的自动弹仓终端滑模控制[J]. 中国机械工程, 2020, 31(15):1787-1792,1797.
doi: 10.3969/j.issn.1004-132X.2020.15.004 |
|
doi: 10.3969/j.issn.1004-132X.2020.15.004 |
|
| [5] |
文浩, 侯保林, 林瑜斌, 等. 曲线链式回转弹仓动力学模型不确定参数辨识[J]. 兵工学报, 2024, 45(5):1460-1471.
doi: 10.12382/bgxb.2022.1196 |
|
doi: 10.12382/bgxb.2022.1196 |
|
| [6] |
鲍丹, 卫俞凯, 金鑫, 等. 考虑输出约束和输入饱和的弹仓自适应控制[J]. 兵工学报, 2024, 45(3):789-797.
doi: 10.12382/bgxb.2022.0896 |
|
doi: 10.12382/bgxb.2022.0896 |
|
| [7] |
doi: 10.1007/s11071-024-10386-4 |
| [8] |
岳才成, 钱林方, 徐亚栋, 等. 基于指数趋近律链传动弹仓自适应模糊滑模控制[J]. 上海交通大学学报, 2018, 52(6):750-756.
doi: 10.16183/j.cnki.jsjtu.2018.06.017 |
|
|
|
| [9] |
谢瑶, 徐亚栋, 鲁飞, 等. 基于扩展状态观测器的链式自动弹仓广义预测控制[J]. 火炮发射与控制学报, 2024, 45(2):105-111.
|
|
|
|
| [10] |
doi: 10.1049/elp2.v18.9 URL |
| [11] |
doi: 10.1016/j.dt.2024.04.008 URL |
| [12] |
doi: 10.1007/s12555-021-0253-3 |
| [13] |
doi: 10.1007/s12206-023-0536-0 |
| [14] |
doi: 10.1109/Access.6287639 URL |
| [15] |
邹权, 钱林方, 徐亚栋, 等. 链式回转弹仓的自适应鲁棒控制[J]. 兵工学报, 2014, 35(11):1922-1927.
doi: 10.3969/j.issn.1000-1093.2014.11.026 |
|
doi: 10.3969/j.issn.1000-1093.2014.11.026 |
|
| [16] |
doi: 10.1007/s11071-024-09836-w |
| [17] |
李兵强, 陈晓雷, 林辉, 等. 机电伺服系统齿隙补偿及终端滑模控制[J]. 电工技术学报, 2016, 31(9):162-168.
|
|
|
|
| [18] |
王彬, 张建书, 段志峰, 等. 行进间坦克炮控系统动力学建模与稳定控制[J]. 兵工学报, 2024, 45(11):4175-4190.
doi: 10.12382/bgxb.2024.0485 |
|
doi: 10.12382/bgxb.2024.0485 |
|
| [19] |
何伟栋. 某链式回转弹仓设计及动力学仿真研究[D]. 西安: 西安工业大学, 2021.
|
|
|
|
| [20] |
陆栋栋. 重型单向齿形推弹链的设计研究[D]. 南京: 南京理工大学, 2016.
|
|
|
|
| [21] |
doi: 10.1109/TCST.2021.3063420 URL |
| [22] |
doi: 10.3390/app12178392 URL |
| [23] |
|
| [1] | LIN Yubin, HOU Baolin, BAO Dan, ZHAO Wei. Implicit Lyapunov Function-based Variable Gain Super-twisting Sliding Mode Control of an Ammunition Transfer Manipulator [J]. Acta Armamentarii, 2024, 45(8): 2573-2583. |
| [2] | ZHOU Guohua, LI Linfeng, WU Kena, LIU Yuelin, XIA Shuai. Numerical Simulation of Magnetic Interference Parameter Identification of AUV Based on L-SHADE Agorithm [J]. Acta Armamentarii, 2024, 45(8): 2678-2687. |
| [3] | ZHAO Wei, HOU Baolin, YAN Shaojun, BAO Dan, LIN Yubin. A Dynamic Model of Interval Uncertainty of Rotational Chain Shell Magazine [J]. Acta Armamentarii, 2024, 45(6): 1991-2002. |
| [4] | CHEN Dong, QIAN Linfang, CHEN Zhiqun, CHEN Longmiao, ZOU Quan, CHEN Junhua. An Improved Quasi-continuous Algorithm for Rotational Shell Magazine Position Control [J]. Acta Armamentarii, 2024, 45(5): 1436-1448. |
| [5] | WEN Hao, HOU Baolin, LIN Yubin, JIN Xin. Dynamic Model Uncertain Parameter Identification for A Curved Chain Rotary Shell Magazine [J]. Acta Armamentarii, 2024, 45(5): 1460-1471. |
| [6] | WANG Qianglong, GAO Xiaoguang, LI Xinyu, YAN Xuchen, WAN Kaifang. Global Sensitivity Analysis on Accuracy of Aviation Fire Control System via DBN Effectiveness Fitting [J]. Acta Armamentarii, 2024, 45(10): 3430-3444. |
| [7] | ZHU Qixin, JIANG Chenyan, ZHANG Guoping, ZHU Yonghong. Identification of Mechanical Parameters of Permanent Magnet Servo System Based on Orthogonal Characteristics of Trigonometric Function [J]. Acta Armamentarii, 2023, 44(6): 1820-1828. |
| [8] | LI Meng, WU Haijun, DONG Heng, REN Guang, ZHANG Peng, HUANG Fenglei. Machine Learning-based Models for Predicting the Penetration Depth of Concrete [J]. Acta Armamentarii, 2023, 44(12): 3771-3782. |
| [9] | LIU Qin, SUN Zhi-li, QIAN Yun-peng, LIU Ying. Reliable Fatigue Life Analysis Method Based on Probabilistic Performance Measure [J]. Acta Armamentarii, 2016, 37(8): 1530-1535. |
| [10] | JIN Xin, ZHOU Ke-dong, HE Lei, HUANG Xue-ying, ZHANG Jun-bin. Parameter Identification of Human Body under Successive Impact [J]. Acta Armamentarii, 2016, 37(4): 598-602. |
| [11] | CHEN Jian, TIAN Liang , SHANG Hong-mo , ZHENG Deng-sheng, WANG Gui-cheng. Identification of Joint Part Parameters of HSK Spindle-toolholder Based on Closed-form Approach [J]. Acta Armamentarii, 2015, 36(7): 1309-1317. |
| [12] | CHENG Guang-li, HU Jin-hua, ZHANG Ming-min. Analytical Methods for Sensitivity of Acoustic Field in Shallow Water to Uncertain Environmental Parameters [J]. Acta Armamentarii, 2014, 35(4): 567-571. |
| [13] | YANG Li, SUN Zhi-li, YIN Ming-ang, WANG Yu-ning. Optimization Design of Cartridge Pressing Structure for Feed Mechanism Based on the Sensitivity Analysis of Multi-attributeDecision Making [J]. Acta Armamentarii, 2014, 35(2): 241-247. |
| [14] | ZOU Quan, QIAN Lin-fang, XU Ya-dong, JIANG Qing-shan, LIU Yan-hui. Adaptive Robust Control of Rotational Chain Shell Magazine [J]. Acta Armamentarii, 2014, 35(11): 1922-1927. |
| [15] | TANG Yu-juan, WANG Xin-jie, WANG Jiong. Design and Experiment of a Linear Ultrasonic Motor for Fuze Safety System [J]. Acta Armamentarii, 2014, 35(1): 27-34. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||