
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 250171-.doi: 10.12382/bgxb.2025.0171
Previous Articles Next Articles
ZHOU Ning1, QIU Zhi2, SU Qi2, DENG Wenxiang1, LI Dongming3, PAN Hongbo4, ZHANG Guoliang4, YAO Jianyong1,*( )
)
Received:2025-03-11
Online:2025-11-27
Contact:
YAO Jianyong
CLC Number:
ZHOU Ning, QIU Zhi, SU Qi, DENG Wenxiang, LI Dongming, PAN Hongbo, ZHANG Guoliang, YAO Jianyong. Adaptive Active Disturbance Rejection Control for Electrohydraulic Proportional Servo Valve[J]. Acta Armamentarii, 2025, 46(11): 250171-.
Add to citation manager EndNote|Ris|BibTeX

Fig.1 Structure and principle of proportional servo valve
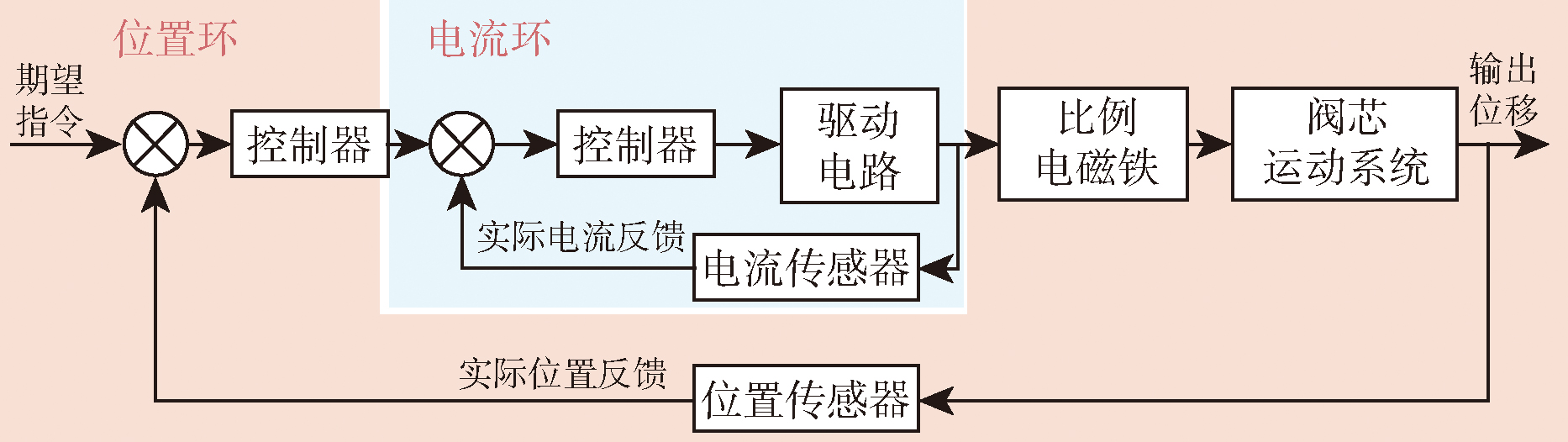
Fig.2 Control architecture of proportional servo valve
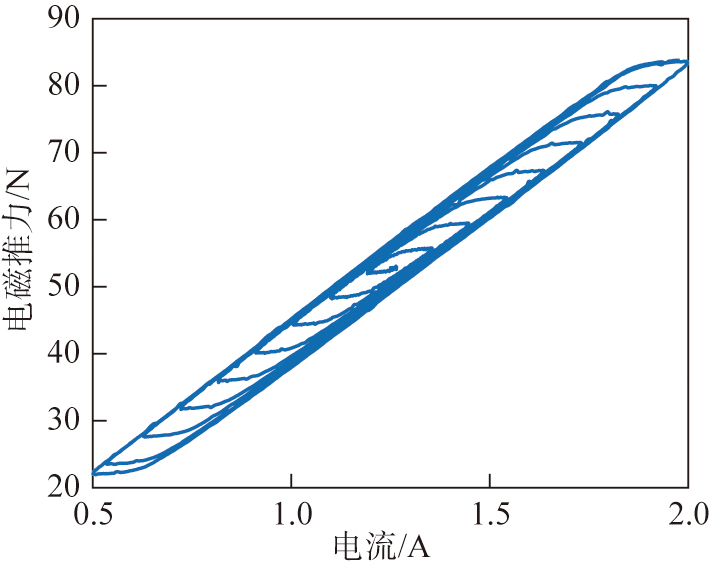
Fig.3 Nonlinear hysteresis of electromagnetic drive force

Fig.4 Nonlinear steady flow force
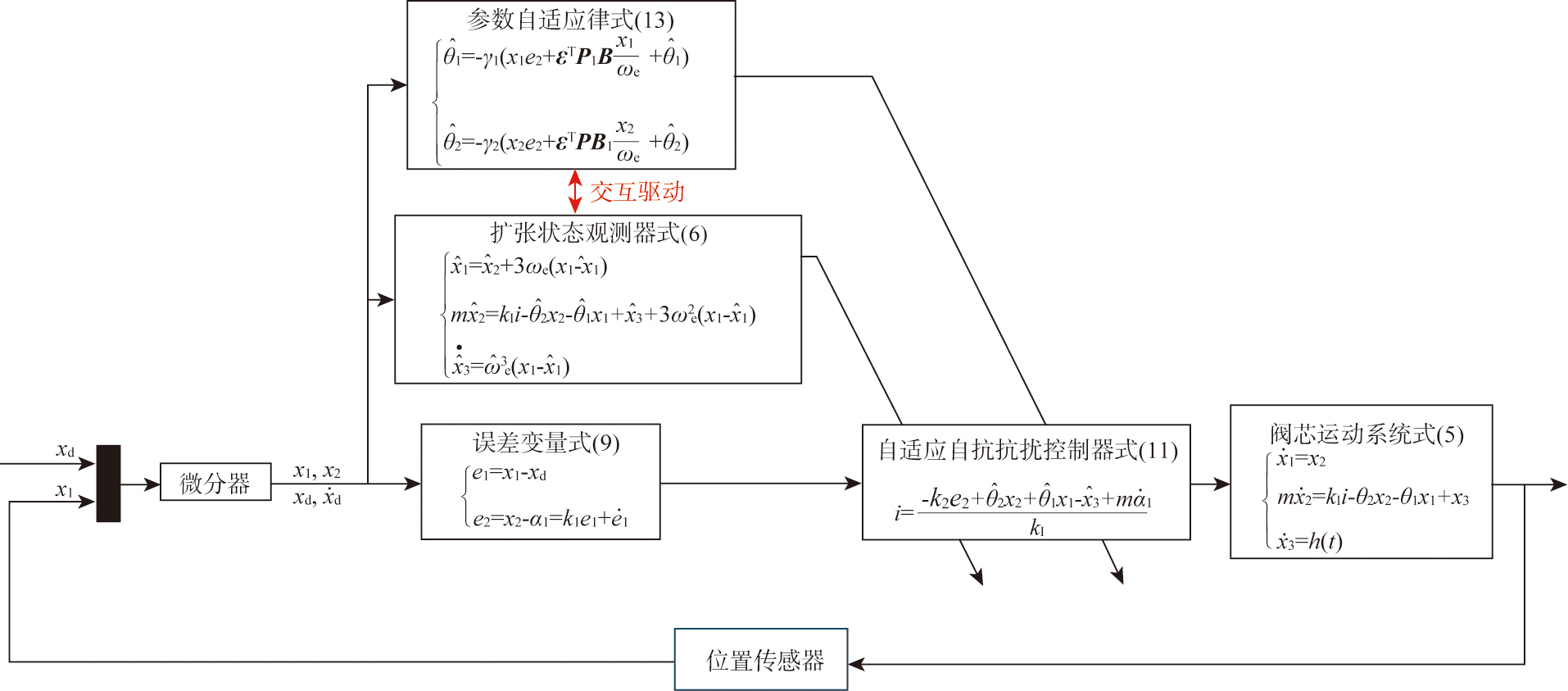
Fig.5 Framework of the developed AADRC

Fig.6 Test rig for basic performance of hydraulic valves
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 0.15 | Bm/(N·m-1·s-1) | 80 |
| kI/(N·A-1) | 42.5 | Fs/N | 62 |
| ps/MPa | 7 | pt/MPa | 0 |
Table 1 Parameters of valve model and work conditions
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| m/kg | 0.15 | Bm/(N·m-1·s-1) | 80 |
| kI/(N·A-1) | 42.5 | Fs/N | 62 |
| ps/MPa | 7 | pt/MPa | 0 |

Fig.7 Tracking performances of three controllers under Condition 1

Fig.8 Tracking errors of three controllers under Condition 1
| 指标 | emax/mm | μ/mm | σ/mm |
|---|---|---|---|
| AADRC | 0.0295 | 0.0097 | 0.0108 |
| MRC | 0.0322 | 0.0164 | 0.0187 |
| PID | 0.0776 | 0.0156 | 0.0204 |
Table 2 Performance index of each controller under Condition 1
| 指标 | emax/mm | μ/mm | σ/mm |
|---|---|---|---|
| AADRC | 0.0295 | 0.0097 | 0.0108 |
| MRC | 0.0322 | 0.0164 | 0.0187 |
| PID | 0.0776 | 0.0156 | 0.0204 |

Fig.9 Parameter estimation of AADRC under Condition 1

Fig.10 Tracking errors of three controllers under Condition 2
| 指标 | emax/mm | μ/mm | σ/mm |
|---|---|---|---|
| AADRC | 0.0737 | 0.0388 | 0.0436 |
| MRC | 0.0916 | 0.0430 | 0.0473 |
| PID | 0.0953 | 0.0452 | 0.0499 |
Table 3 Performance index of each controller under Condition 2
| 指标 | emax/mm | μ/mm | σ/mm |
|---|---|---|---|
| AADRC | 0.0737 | 0.0388 | 0.0436 |
| MRC | 0.0916 | 0.0430 | 0.0473 |
| PID | 0.0953 | 0.0452 | 0.0499 |

Fig.11 Tracking performances of three controllers under Condition 3

Fig.12 Tracking errors of three controllers under Condition 3
| 指标 | Me/mm | μ/mm | σ/mm |
|---|---|---|---|
| AADRC | 0.0255 | 0.0063 | 0.0075 |
| MRC | 0.0245 | 0.0093 | 0.0100 |
| PID | 0.0490 | 0.0057 | 0.0072 |
Table 4 Performance index of each controller under Condition 3
| 指标 | Me/mm | μ/mm | σ/mm |
|---|---|---|---|
| AADRC | 0.0255 | 0.0063 | 0.0075 |
| MRC | 0.0245 | 0.0093 | 0.0100 |
| PID | 0.0490 | 0.0057 | 0.0072 |
| [1] |
代普, 潘军, 马晴, 等. 火炮俯仰电液伺服系统速度非线性抑制技术研究[J]. 兵工学报, 2022, 43(6):1246-1254.
doi: 10.12382/bgxb.2021.0357 |
|
doi: 10.12382/bgxb.2021.0357 |
|
| [2] |
谢政, 谢建, 杜文正, 等. 大型发射装置液压起竖系统的滑模控制研究[J]. 兵工学报, 2015, 36(4):674-680.
doi: 10.3969/j.issn.1000-1093.2015.04.015 |
|
|
|
| [3] |
冯江涛, 高钦和, 邵亚军, 等. 导弹液压起竖系统流量压力复合控制策略研究[J]. 兵工学报, 2018, 39(2):209-216.
doi: 10.3969/j.issn.1000-1093.2018.02.001 |
|
|
|
| [4] |
吴河灯, 葛声宏, 周振锋, 等. 非对称喷嘴挡板压力伺服阀建模与特性研究[J]. 液压与气动, 2024, 48(6):159-168.
doi: 10.11832/j.issn.1000-4858.2024.06.018 |
|
|
|
| [5] |
方锦辉, 孔晓武, 魏建华. 伺服比例阀的非线性建模与实验验证[J]. 浙江大学学报(工学版), 2014, 48(5):784-790.
|
|
|
|
| [6] |
doi: 10.1186/s10033-019-0427-6 |
| [7] |
苏琦. 先导式电液比例方向阀换向滞后分析及其补偿方法研究[D]. 杭州: 浙江大学, 2016:46-47.
|
|
|
|
| [8] |
林振浩. 滑阀阀芯卡滞形成机理及抑制方法研究[D]. 杭州: 浙江大学, 2023:138-140.
|
|
|
|
| [9] |
艾超, 刘礼庆, 魏立忠, 等. 比例伺服阀非线性液动力模型修正与特性分析[J]. 液压与气动, 2024, 48(11):82-93.
doi: 10.11832/j.issn.1000-4858.2024.11.010 |
|
|
|
| [10] |
陈立娟, 彭泽钦, 高伟, 等. 直动式高频响比例阀位置控制研究[J]. 液压与气动, 2021(2):36-41.
doi: 10.11832/j.issn.1000-4858.2021.02.006 |
|
|
|
| [11] |
仇智, 苏琦, 方梓帆, 等. 一种基于状态反馈的比例伺服阀控制方法[J]. 飞控与探测, 2022, 5(1):39-47.
|
|
|
|
| [12] |
王大彧, 郭宏, 刘治, 等. 直驱阀用音圈电机的模糊非线性PID控制[J]. 电工技术学报, 2011, 26(3):52-56.
|
|
|
|
| [13] |
张立强, 陈强, 柳志姣, 等. 音圈电机直驱阀的神经网络PID控制[J]. 液压与气动, 2015(6):80-83.
|
|
|
|
| [14] |
doi: 10.1016/j.isatra.2024.05.027 pmid: 38782638 |
| [15] |
doi: 10.1016/j.mechatronics.2017.02.007 URL |
| [16] |
李海滨, 沈俊, 仇智, 等. 高压阀口液动力补偿控制策略仿真分析[J]. 液压与气动, 2024, 48(1):1-9.
doi: 10.11832/j.issn.1000-4858.2024.01.001 |
|
|
|
| [17] |
|
| [18] |
doi: 10.1177/0959651814549647 URL |
| [19] |
doi: 10.1109/TIE.2008.2011621 URL |
| [20] |
doi: 10.1109/ACCESS.2018.2854228 URL |
| [21] |
齐晓慧, 李杰, 韩帅涛. 基于BP神经网络的自适应自抗扰控制及仿真[J]. 兵工学报, 2013, 34(6):776-782.
doi: 10. 3969/ j. issn. 1000-1093. 2013. 06. 019 |
|
|
|
| [22] |
doi: 10.1109/TIE.2015.2448060 URL |
| [23] |
doi: 10.1109/TIE.2015.2435004 URL |
| [24] |
doi: 10.1007/s11071-017-3538-6 URL |
| [25] |
doi: 10.1016/j.mechatronics.2016.10.007 URL |
| [1] | YUAN Shusen, HU Zhe, YI Wenjun, DENG Wenxiang, YAO Jianyong, YANG Guolai, GUAN Jun, WANG Yimin. Active Disturbance Adaptive Composite Control of Stabilization System for Unmanned Vehicle-mounted Gun during Moving [J]. Acta Armamentarii, 2025, 46(9): 240888-. |
| [2] | WANG Zeqing, XU Haixiang, YU Wenzhao, DU Zhe, WANG Hongmei. Dual-Loop Prescribed-Time 3D Formation Control of Underactuated Multi-AUVs [J]. Acta Armamentarii, 2025, 46(8): 250046-. |
| [3] | LI Junhui, WANG Wei, WANG Yuchen, JI Yi. Unmanned Aerial Vehicle Formation Control Based on Prescribed-time Consensus Theory [J]. Acta Armamentarii, 2025, 46(8): 240863-. |
| [4] | XIE Jingshuo, HAN Lijin, LIU Hui, REN Xiaolei, HOU Hongyu, SHANG Qingyi. Attitude Control Method of Serial Wheel-legged Robot [J]. Acta Armamentarii, 2025, 46(2): 240183-. |
| [5] | XING Wensong, LONG Zhenhai, HUANG Jie. Analysis of Low-cycle Torsional Fatigue Properties of 42CrMo Based on Hysteresis Loop Data [J]. Acta Armamentarii, 2025, 46(1): 231163-. |
| [6] | ZHANG Jiaxuan, LI Bin, NIU Wenchao, LI Kaixiang. Adaptive Fractional Order Positive Position Feedback for Vibration Control of Vertical Tail [J]. Acta Armamentarii, 2024, 45(8): 2542-2553. |
| [7] | ZHAO Xinyun, YU Jianqiao. Dynamic Modeling and Attitude Control for Novel Agile Projectile [J]. Acta Armamentarii, 2024, 45(7): 2182-2196. |
| [8] | XIE Xin, ZHENG Jieji, LI Baoyu, YU Bin, FAN Dapeng. Online Identification and Adaptive Control Method for Servo Transmission Device in Weapon Station [J]. Acta Armamentarii, 2024, 45(6): 1761-1775. |
| [9] | BAO Dan, WEI Yukai, JIN Xin, HOU Baolin. Adaptive Control of Magazines Considering Output Constraints and Input Saturation [J]. Acta Armamentarii, 2024, 45(3): 789-797. |
| [10] | PEI Xinyue, YU Yong, LI Zheng, LI Jiaxun, YU Jianqiao. Control of Quick Turning of Missile with Lateral Thrust and Aerodynamics Based on Neural Network [J]. Acta Armamentarii, 2024, 45(10): 3564-3576. |
| [11] | WANG Liang, WANG Shoukun, NIU Tianwei, WANG Junzheng. Speed Control Method for Unmanned Special Vehicle Based on Terrain Feature Time-frequency Transform [J]. Acta Armamentarii, 2024, 45(10): 3718-3731. |
| [12] | ZHANG Tianyi, ZHENG Ying, QIU Xinguo, JI Xingjian, JIN Xiaohang. Disturbance Compensation Strategy for Fifth-order Joint Servomechanism Based on Characteristic Model [J]. Acta Armamentarii, 2024, 45(1): 276-287. |
| [13] | YU Zhilong, LI Yinghui, PEI Binbin, XU Wenfeng, DUAN Xiaocong, SONG Kexin. Robust Adaptive Fault-tolerant Attitude Control of Flying-wing UAVs with Flight Envelope Constraints [J]. Acta Armamentarii, 2024, 45(1): 231-240. |
| [14] | XU Peng, XING Boyang, LIU Yufei, LI Yongyao, ZENG Yi, ZHENG Dongdong. Anti-disturbance Composite Controller Design of Quadruped Robot Based on Extended State Observer and Model Predictive Control Technique [J]. Acta Armamentarii, 2023, 44(S2): 12-21. |
| [15] | WANG Zhilin, WANG Jiang, QI Qi, FAN Shipeng. Novel Adaptive Robust Roll Control Method Based on LESO [J]. Acta Armamentarii, 2023, 44(7): 1920-1929. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||