
Responsible Institution: China Association for Science and Technology
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Sponsor: China Ordnance Society
ISSN 1000-1093 CN 11-2176/TJ
Acta Armamentarii ›› 2025, Vol. 46 ›› Issue (11): 241129-.doi: 10.12382/bgxb.2024.1129
Previous Articles Next Articles
ZHANG Gengming1, ZHANG Lihua1,*( ), WANG Yitao2, ZHOU Yinfei1, DAI Zeyuan1
), WANG Yitao2, ZHOU Yinfei1, DAI Zeyuan1
Received:2024-12-27
Online:2025-11-27
Contact:
ZHANG Lihua
ZHANG Gengming, ZHANG Lihua, WANG Yitao, ZHOU Yinfei, DAI Zeyuan. Automatic Planning Method for Underwater Vehicles Considering the Influence of Multiple Environmental Factors[J]. Acta Armamentarii, 2025, 46(11): 241129-.
Add to citation manager EndNote|Ris|BibTeX
Fig.1 Schematic diagram of model construction process
Fig.2 Schematic diagram of the target lateral range model

Fig.3 Schematic diagram for selecting the first and second shortest distances

Fig.4 Distribution map of patrol width in the ocean area
Fig.5 The detection probability of fixed sonar for targets at a depth of 30m in October
Fig.6 Overall three-dimensional concealment effectiveness of CMF in October

Fig.7 Schematic diagram of path planning algorithm
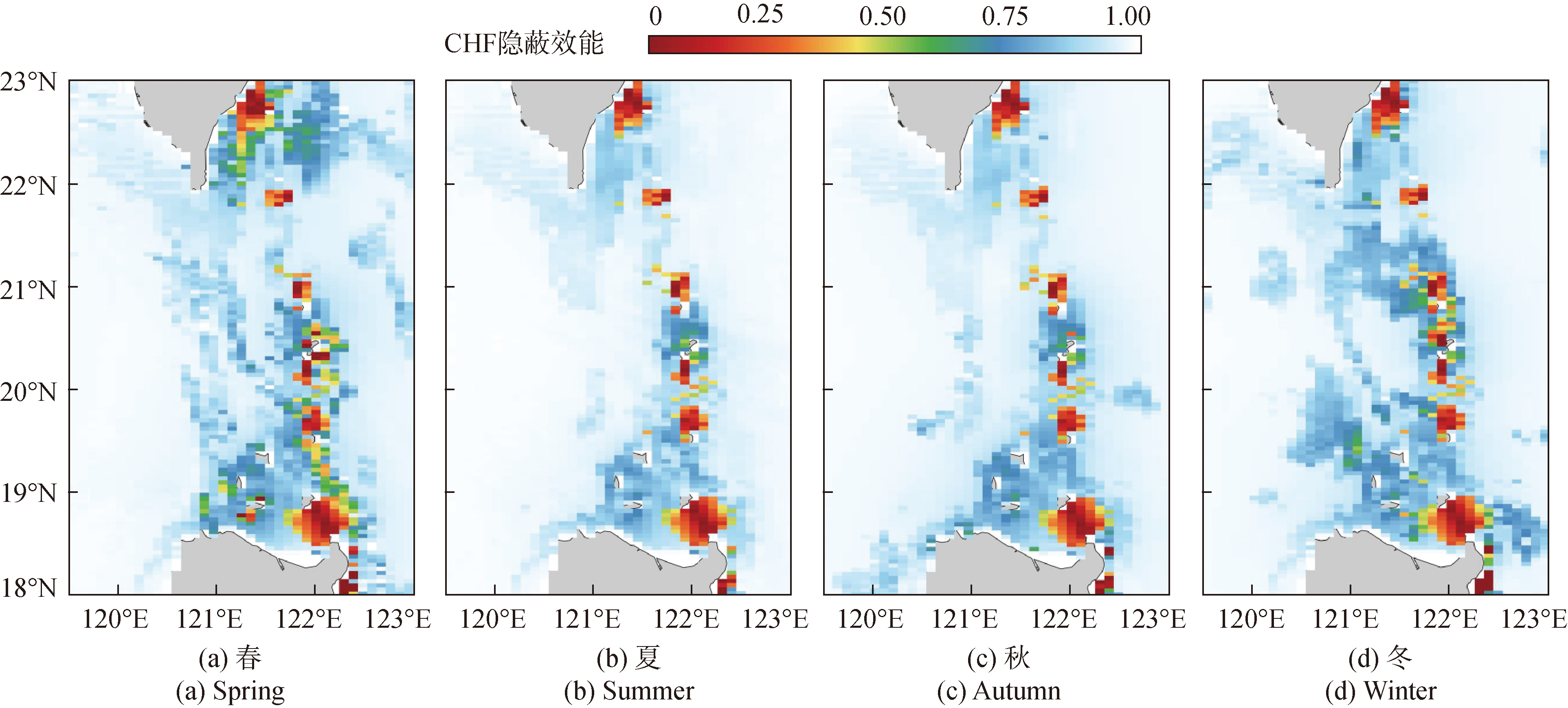
Fig.8 The CHF concealment effectiveness of the 30-meter layer during four seasons.

Fig.9 The CMF concealment effectiveness of the 30-meter layer during four seasons.
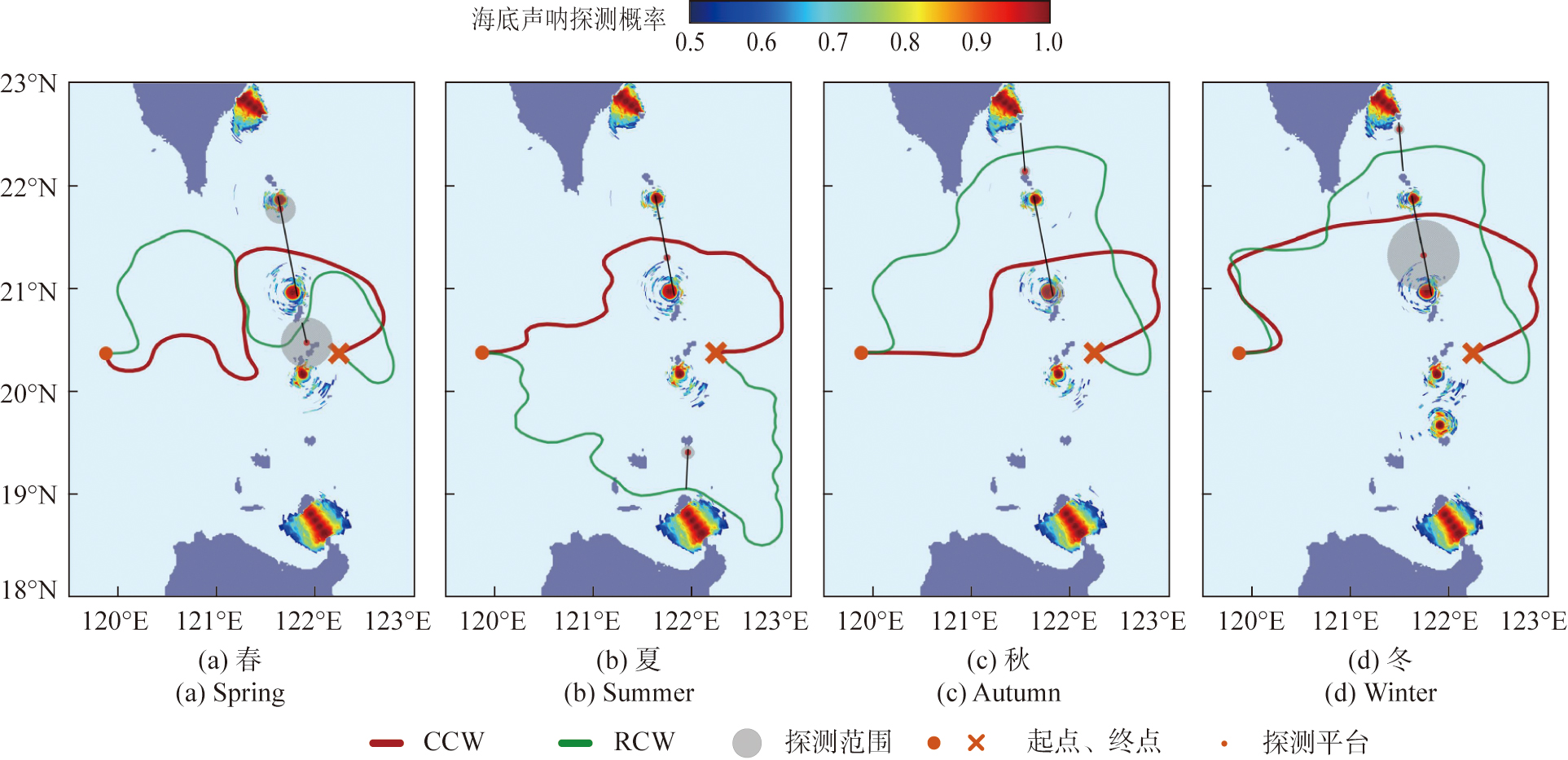
Fig.10 Experiment path planning results and detection force diagram
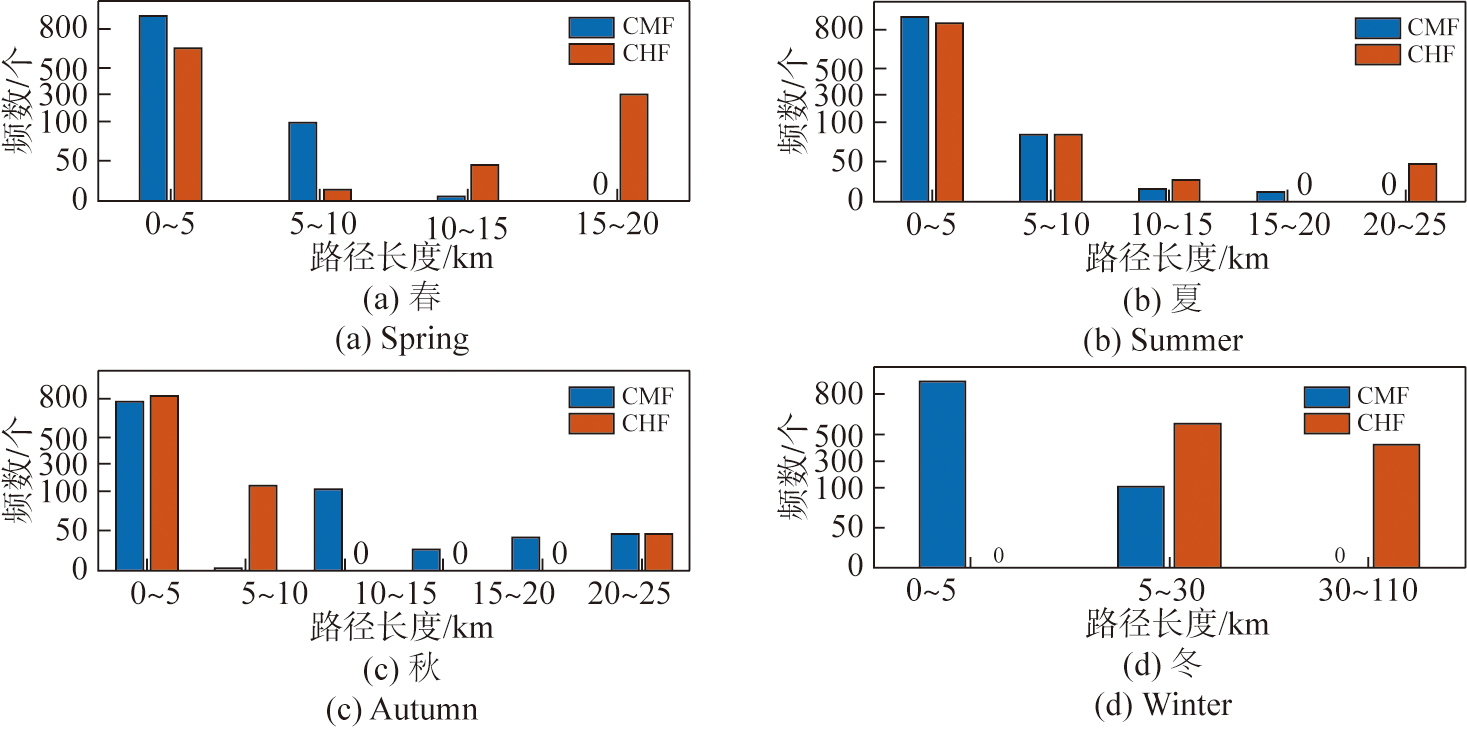
Fig.11 Histogram of path lengths covered by the detection range of the mobile platform for each path in Experiment during four seasons.
| 方法 | 春季 | 夏季 | 秋季 | 冬季 | 均值 | 标准差 |
|---|---|---|---|---|---|---|
| CHF | 0.2815 | 0.1585 | 0.1528 | 0.8124 | 0.3513 | 0.3131 |
| CMF | 0.0663 | 0.0976 | 0.1523 | 0.1060 | 0.1056 | 0.0355 |
Table 1 The average cumulative detection probability corresponding to each path in the experiment
| 方法 | 春季 | 夏季 | 秋季 | 冬季 | 均值 | 标准差 |
|---|---|---|---|---|---|---|
| CHF | 0.2815 | 0.1585 | 0.1528 | 0.8124 | 0.3513 | 0.3131 |
| CMF | 0.0663 | 0.0976 | 0.1523 | 0.1060 | 0.1056 | 0.0355 |
| 方法 | 春季 | 夏季 | 秋季 | 冬季 | 均值 |
|---|---|---|---|---|---|
| CHF | 894.7 | 918.2 | 998.8 | 866.1 | 919.45 |
| CMF | 602.1 | 594.4 | 719.6 | 717.4 | 658.4 |
Table 2 Length of each path in the experiment km
| 方法 | 春季 | 夏季 | 秋季 | 冬季 | 均值 |
|---|---|---|---|---|---|
| CHF | 894.7 | 918.2 | 998.8 | 866.1 | 919.45 |
| CMF | 602.1 | 594.4 | 719.6 | 717.4 | 658.4 |
| [1] |
doi: 10.3390/s22103896 URL |
| [2] |
doi: 10.1007/s40430-024-04720-5 |
| [3] |
肖元弼, 彭认灿, 董箭, 等. 顾及面积差的层内等效二段线替代法优化声速剖面[J]. 测绘学报, 2023, 52(12):2028-2038.
doi: 10.11947/j.AGCS.2023.20210342 |
|
doi: 10.11947/j.AGCS.2023.20210342 |
|
| [4] |
吴双林, 秦继兴, 李整林, 等. 声速剖面对深海远程声脉冲结构的影响[J]. 声学学报, 2023, 48(4):774-784.
|
|
|
|
| [5] |
张海刚, 谢金怀, 王笑寒, 等. 东沙海域上坡波导声传播实验及其特性分析[J]. 声学学报, 2024, 49(4):835-843.
|
|
|
|
| [6] |
doi: 10.3390/jmse12071191 URL |
| [7] |
单元春, 林建恒, 衣雪娟, 等. 海峡海域海洋环境噪声三维空间特性分析[J]. 声学学报, 2024, 49(4):814-823.
|
|
|
|
| [8] |
|
| [9] |
doi: 10.1109/ACCESS.2022.3164175 URL |
| [10] |
|
| [11] |
蓝强, 马树青, 朴胜春, 等. BELLHOP3D模型的多核并行及性能评估[J]. 声学技术, 2024, 43(4):468-473.
|
|
|
|
| [12] |
付笛. 深海复杂地形环境声场特征及声隐蔽路径规划应用研究[D]. 杭州: 浙江大学, 2024.
|
|
|
|
| [13] |
秦锋, 赵志允, 于振涛. 非均匀温盐场潜艇声隐蔽效能仿真研究[J]. 青岛大学学报(工程技术版), 2020, 35(4):62-67.
|
|
|
|
| [14] |
刘文, 胡术, 李辉. 潜艇隐蔽效能建模与快速计算[J]. 舰船科学技术, 2023, 45(6):39-46.
|
|
|
|
| [15] |
郭东田, 董晓明, 宋佳平. 基于潜艇先验航向信息的编队应召搜索研究[J]. 计算机仿真, 2023, 40(4):16-20.
|
|
|
|
| [16] |
张广林, 胡小梅, 柴剑飞, 等. 路径规划算法及其应用综述[J]. 现代机械, 2011 (5):85-90.
|
|
|
|
| [17] |
|
| [18] |
doi: 10.1109/48.90883 URL |
| [19] |
|
|
|
|
| [20] |
doi: 10.3390/jmse11081574 URL |
| [21] |
卫翔, 刘星璇, 付殿峥, 等. 基于声纳搜索累积探测概率的平台路径优化方法[J]. 系统仿真学报, 2024, 36(11):2674-2683.
doi: 10.16182/j.issn1004731x.joss.23-0953 |
|
|
|
| [22] |
张会, 陆铭华, 吴思瑾. 潜艇突破潜艇反潜封锁效能分析方法研究[J]. 数学的实践与认识, 2021, 51(12):205-212.
|
|
|
|
| [23] |
王洪胜, 郭传福, 王书齐, 等. 水面舰艇对潜直线往返巡逻搜索方案优选[J]. 兵器装备工程学报, 2016, 37(12):31-34.
|
|
|
|
| [24] |
|
| No related articles found! |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||