
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (9): 3240-3252.doi: 10.12382/bgxb.2023.1022
刘志衡, 刘伟平*( ), 焦博
), 焦博
收稿日期:2023-10-17
上线日期:2024-03-11
通讯作者:
基金资助:
LIU Zhiheng, LIU Weiping*(), JIAO Bo
Received:2023-10-17
Online:2024-03-11
摘要:
为实现对特定区域卫星导航信号进行有效管制,通常可以使用压制干扰源对全球卫星导航系统(Global Navigation Satellite System, GNSS)实施导航干扰,而GNSS干扰源的部署方案将直接决定能否取得理想干扰效果。以单GNSS干扰源可视域分析方法为基础,研究GNSS干扰源分布式部署算法,在对传统排列组合算法分析的基础上提出计算效率更高的全局搜索算法。当任务区域增大时,为了进一步提高算法效率,在全局搜索算法的基础上又引入局部最优点的概念,提出一种基于局部最优点的优化搜索算法,且当局部最优点等级为0阶时,全局搜索算法与基于局部最优点的优化搜索算法互为等价,从而保证两种算法的数学统一。实验分析结果表明:当任务区域较小时,与传统排列组合算法相比,采用全局搜索算法能够在结果差异不大的情况下将计算效率提升99%以上;当任务区域较大时,与全局搜索算法相比,采用不同等级局部最优点的优化搜索算法,能够进一步将计算效率提升60%~97%。
中图分类号:
刘志衡, 刘伟平, 焦博. 基于局部最优点的GNSS分布式压制干扰源部署算法[J]. 兵工学报, 2024, 45(9): 3240-3252.
LIU Zhiheng, LIU Weiping, JIAO Bo. GNSS Distributed Interference Source Deployment Algorithm Based on Locally Optimal Point[J]. Acta Armamentarii, 2024, 45(9): 3240-3252.
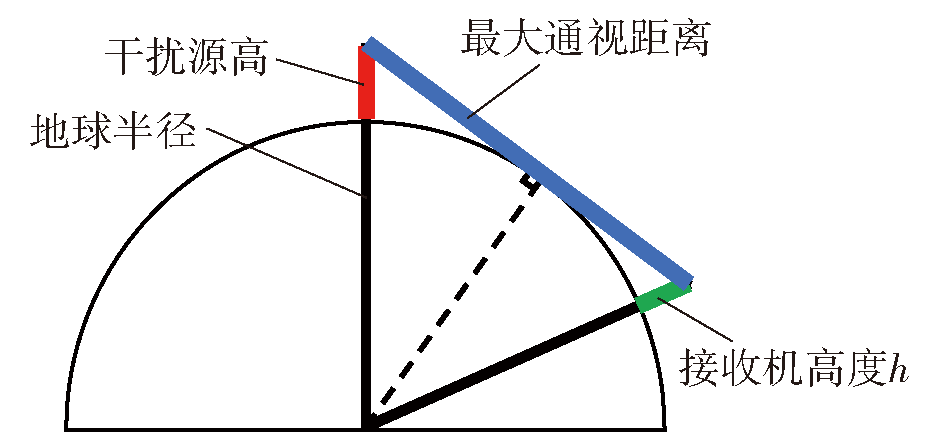
图1 干扰信号在传播过程中受地球曲率的影响
Fig.1 Interference signal affected by the curvature of the earth during its propagation
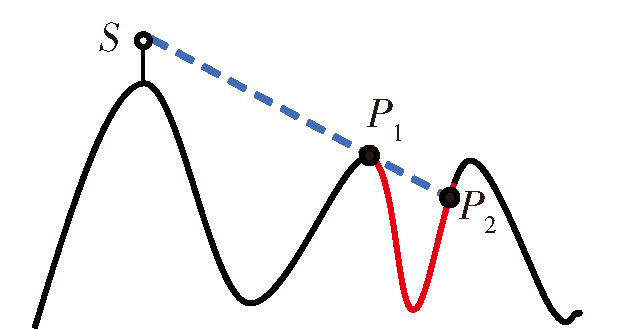
图2 干扰信号传播过程中受到地形遮挡的影响
Fig.2 Interference signal affected by terrain occlusion during its propagation
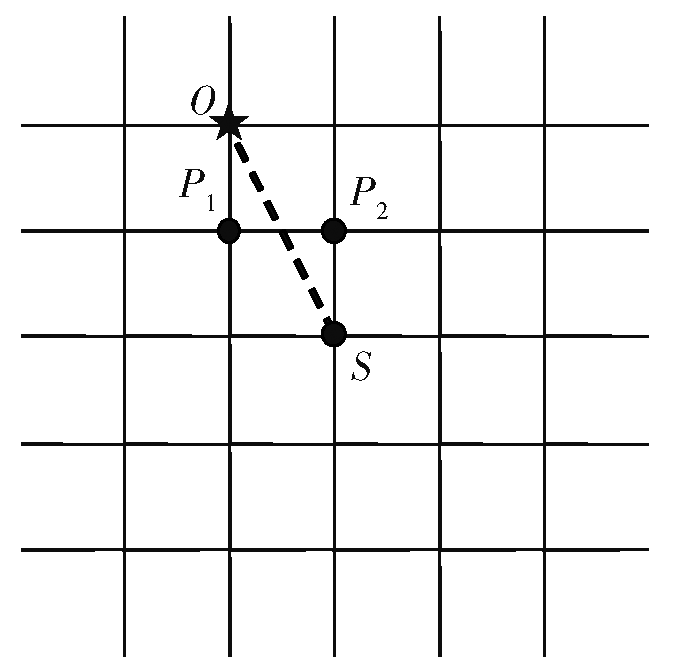
图3 基于参考面的可视域分析
Fig.3 Viewshed analysis based on reference plane
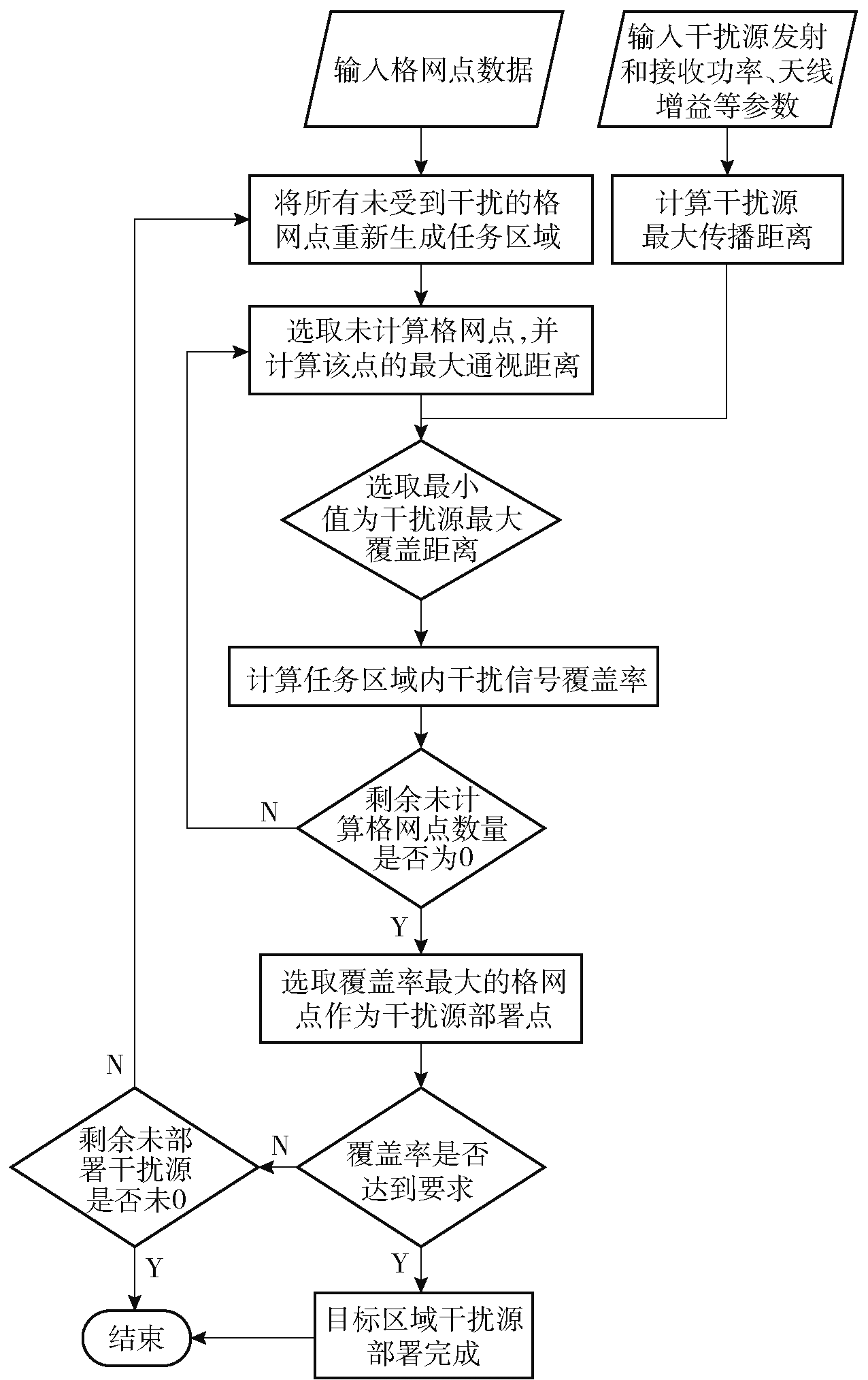
图4 全局搜索算法流程
Fig.4 Flow chart of global search algorithm
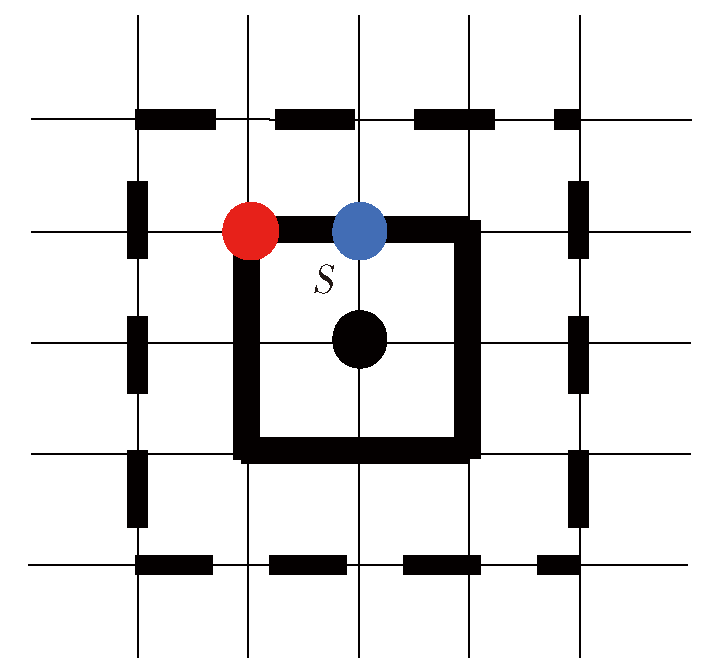
图5 局部最优点
Fig.5 Locally optimal point
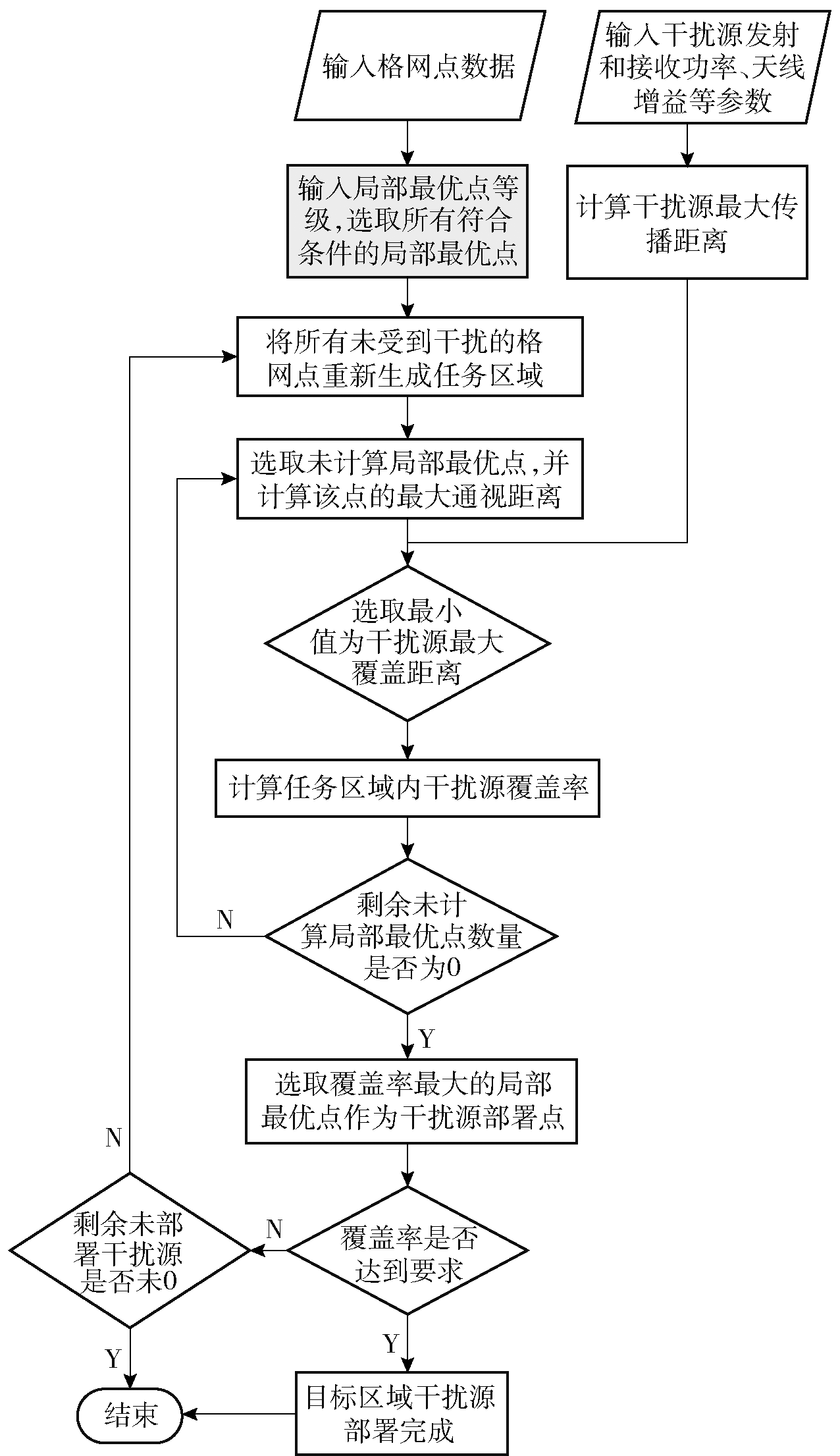
图6 基于局部最优点的优化搜索算法流程
Fig.6 Flow chart of optimized search algorithm based on locally optimal point
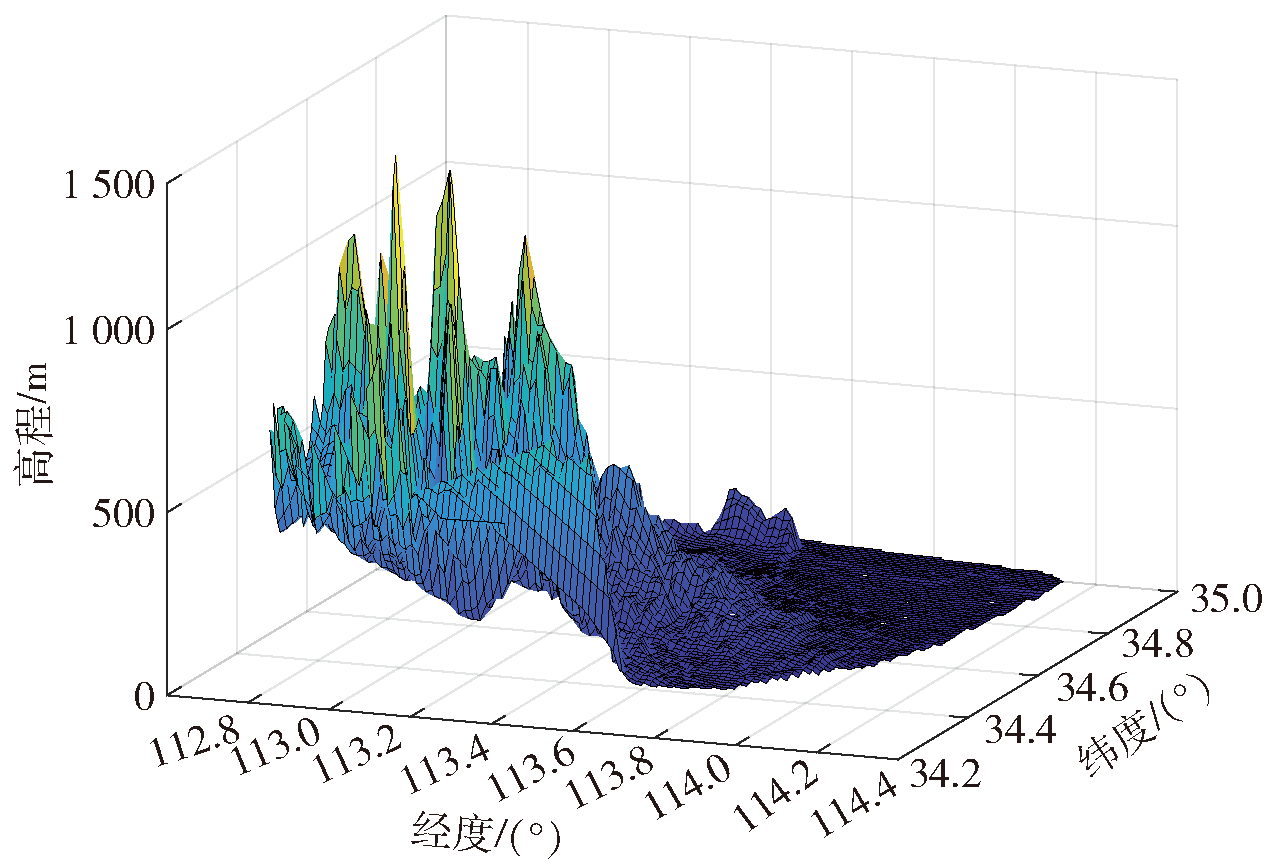
图7 郑州市地形图
Fig.7 Topographic map of Zhengzhou City
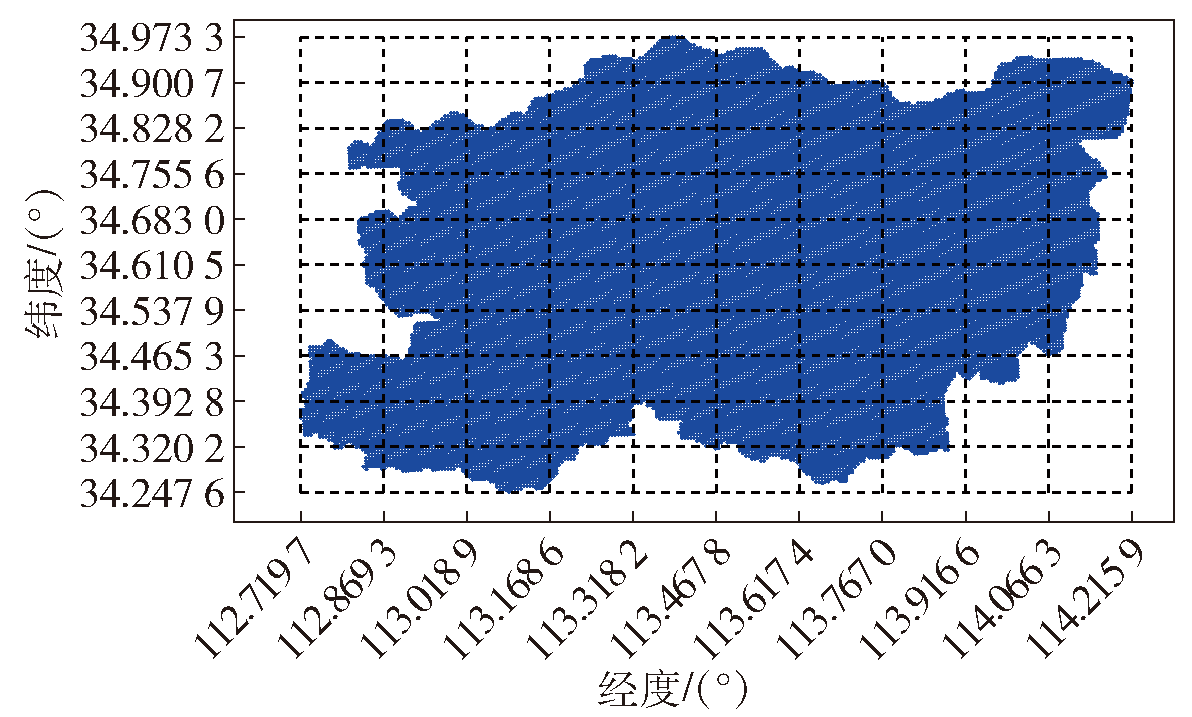
图8 郑州市DEM数据
Fig.8 DEM data of Zhengzhou City
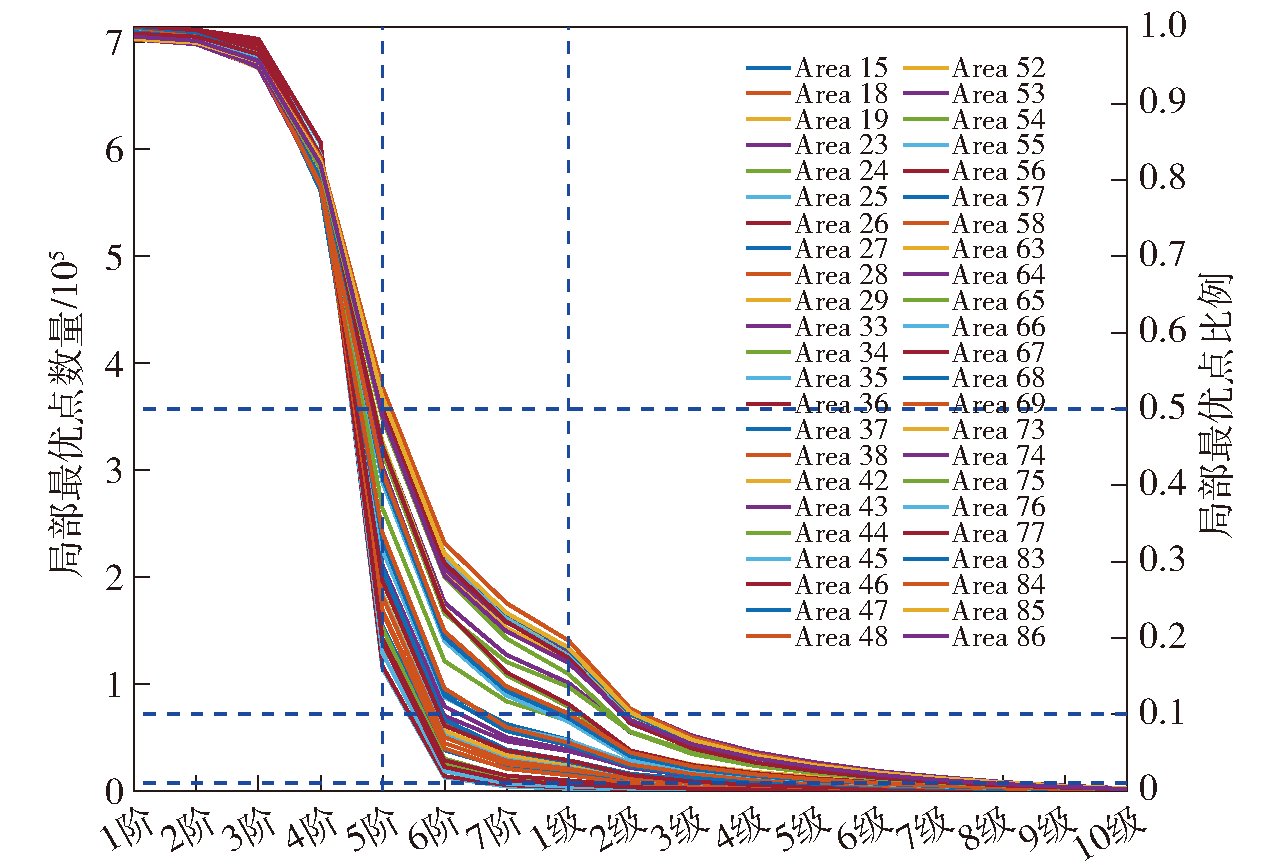
图9 不同等级局部最优点数量与比例
Fig.9 The quantity/proportional distribution of locally optimal points of different grades
| 干扰源部署算法 | 特点 |
|---|---|
| 排列组合算法 | 部署方案最优,计算效率复杂度较高,实用性较差 |
| 全局算法 | 部署方案较优,计算复杂度较低,计算效率取决于任务区域大小,一般用于较小区域 |
| 基于局部最优点 的优化搜索算法 | 部署方案较优,计算复杂度较低,计算效率取决于局部最优点等级,局部最优点等级越高,计算效率越高,适用于任何区域 |
表1 干扰源部署算法对比
Table 1 Comparison of interference source deployment algorithms
| 干扰源部署算法 | 特点 |
|---|---|
| 排列组合算法 | 部署方案最优,计算效率复杂度较高,实用性较差 |
| 全局算法 | 部署方案较优,计算复杂度较低,计算效率取决于任务区域大小,一般用于较小区域 |
| 基于局部最优点 的优化搜索算法 | 部署方案较优,计算复杂度较低,计算效率取决于局部最优点等级,局部最优点等级越高,计算效率越高,适用于任何区域 |
| 场景编号 | 组别序号 | 接收机抗干扰能力 (干信比)/dB | 干扰源发射 功率/W | 发射天线 增益/dB | 接收天线 增益/dB | 接收信号 功率/dBw | 干扰源最大 传播距离/m | 任务区域 大小/m2 |
|---|---|---|---|---|---|---|---|---|
| 1 | 1-1 | 100 | 1 | 6 | 0 | -160 | 30 | 100×100 |
| 1-2 | 100 | 10 | 2 | 0 | -160 | 60 | 100×100 | |
| 2 | 2-1 | 100 | 10 | 2 | 0 | -160 | 60 | 200×200 |
| 2-2 | 100 | 9 | 6 | 0 | -160 | 90 | 200×200 |
表2 仿真场景配置1
Table 2 Simulation scenario configuration 1
| 场景编号 | 组别序号 | 接收机抗干扰能力 (干信比)/dB | 干扰源发射 功率/W | 发射天线 增益/dB | 接收天线 增益/dB | 接收信号 功率/dBw | 干扰源最大 传播距离/m | 任务区域 大小/m2 |
|---|---|---|---|---|---|---|---|---|
| 1 | 1-1 | 100 | 1 | 6 | 0 | -160 | 30 | 100×100 |
| 1-2 | 100 | 10 | 2 | 0 | -160 | 60 | 100×100 | |
| 2 | 2-1 | 100 | 10 | 2 | 0 | -160 | 60 | 200×200 |
| 2-2 | 100 | 9 | 6 | 0 | -160 | 90 | 200×200 |
| 场景编号 | 组别序号 | 使用干扰源数量/个 | 计算时间/s | 耗时减少 | 干扰覆盖率/% | 结果 | |||
|---|---|---|---|---|---|---|---|---|---|
| 排列组 合算法 | 全局搜 索算法 | 排列组 合算法 | 全局搜 索算法 | 百分比/% | 排列组 合算法 | 全局搜 索算法 | 差异/% | ||
| 1 | 1-1 | 5 | 5 | 1341.99 | 0.04 | 99.99 | 88.89 | 83.95 | 4.94 |
| 1-2 | 2 | 2 | 35.54 | 0.03 | 99.92 | 96.30 | 93.82 | 2.48 | |
| 2 | 2-1 | 4 | 4 | 16357.95 | 0.33 | 99.99 | 82.35 | 77.21 | 5.14 |
| 2-2 | 3 | 3 | 1954.18 | 0.47 | 99.98 | 94.85 | 85.66 | 9.19 | |
表3 仿真程序运行时间与结果差异对比(排列组合算法与全局搜索算法对比)
Table 3 Simulation program run time and result difference comparison (comparison between permutation and combination algorithm and global search algorithm)
| 场景编号 | 组别序号 | 使用干扰源数量/个 | 计算时间/s | 耗时减少 | 干扰覆盖率/% | 结果 | |||
|---|---|---|---|---|---|---|---|---|---|
| 排列组 合算法 | 全局搜 索算法 | 排列组 合算法 | 全局搜 索算法 | 百分比/% | 排列组 合算法 | 全局搜 索算法 | 差异/% | ||
| 1 | 1-1 | 5 | 5 | 1341.99 | 0.04 | 99.99 | 88.89 | 83.95 | 4.94 |
| 1-2 | 2 | 2 | 35.54 | 0.03 | 99.92 | 96.30 | 93.82 | 2.48 | |
| 2 | 2-1 | 4 | 4 | 16357.95 | 0.33 | 99.99 | 82.35 | 77.21 | 5.14 |
| 2-2 | 3 | 3 | 1954.18 | 0.47 | 99.98 | 94.85 | 85.66 | 9.19 | |
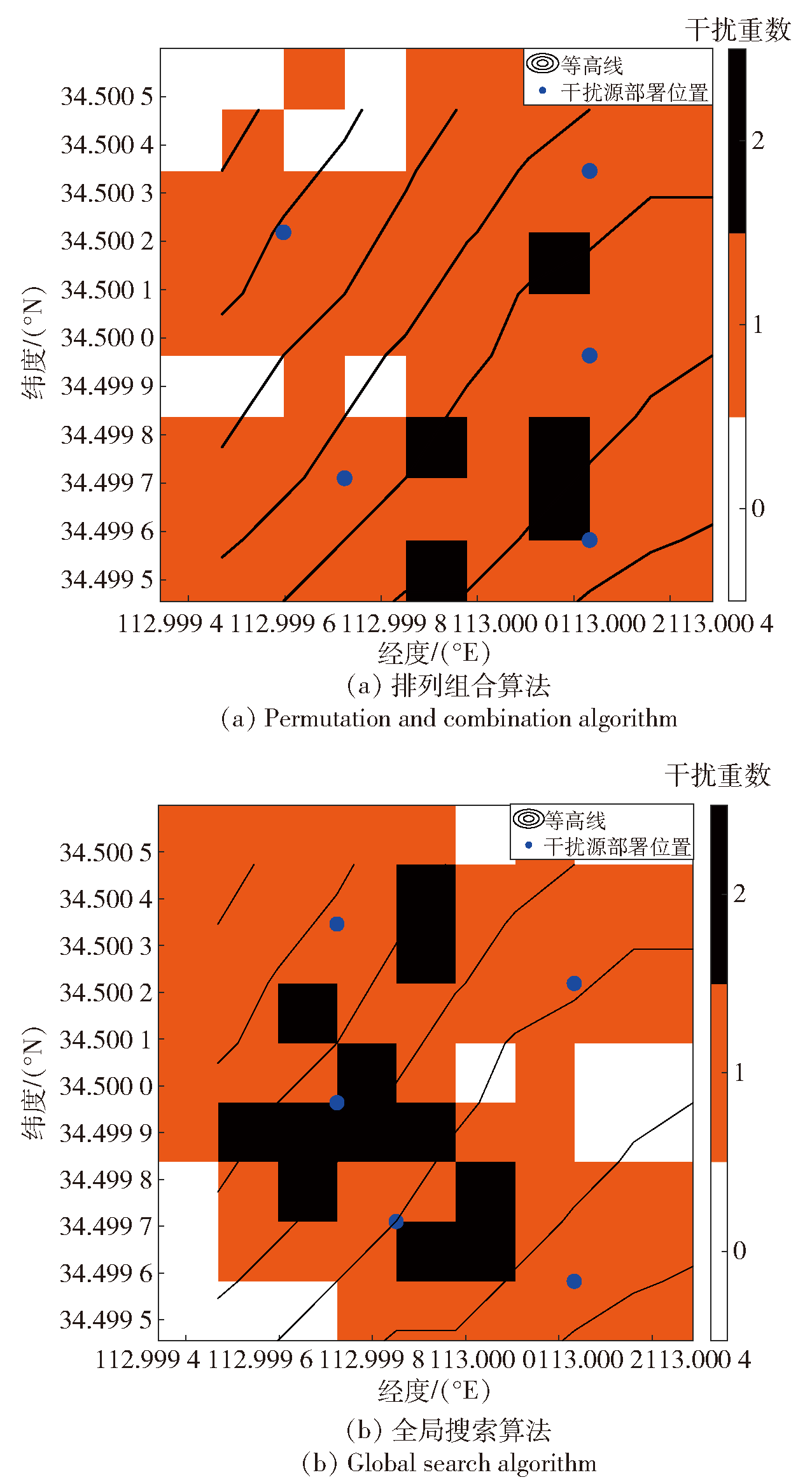
图10 场景1-1干扰源部署分布图
Fig.10 Interference source deployment diagram in Scenario 1-1
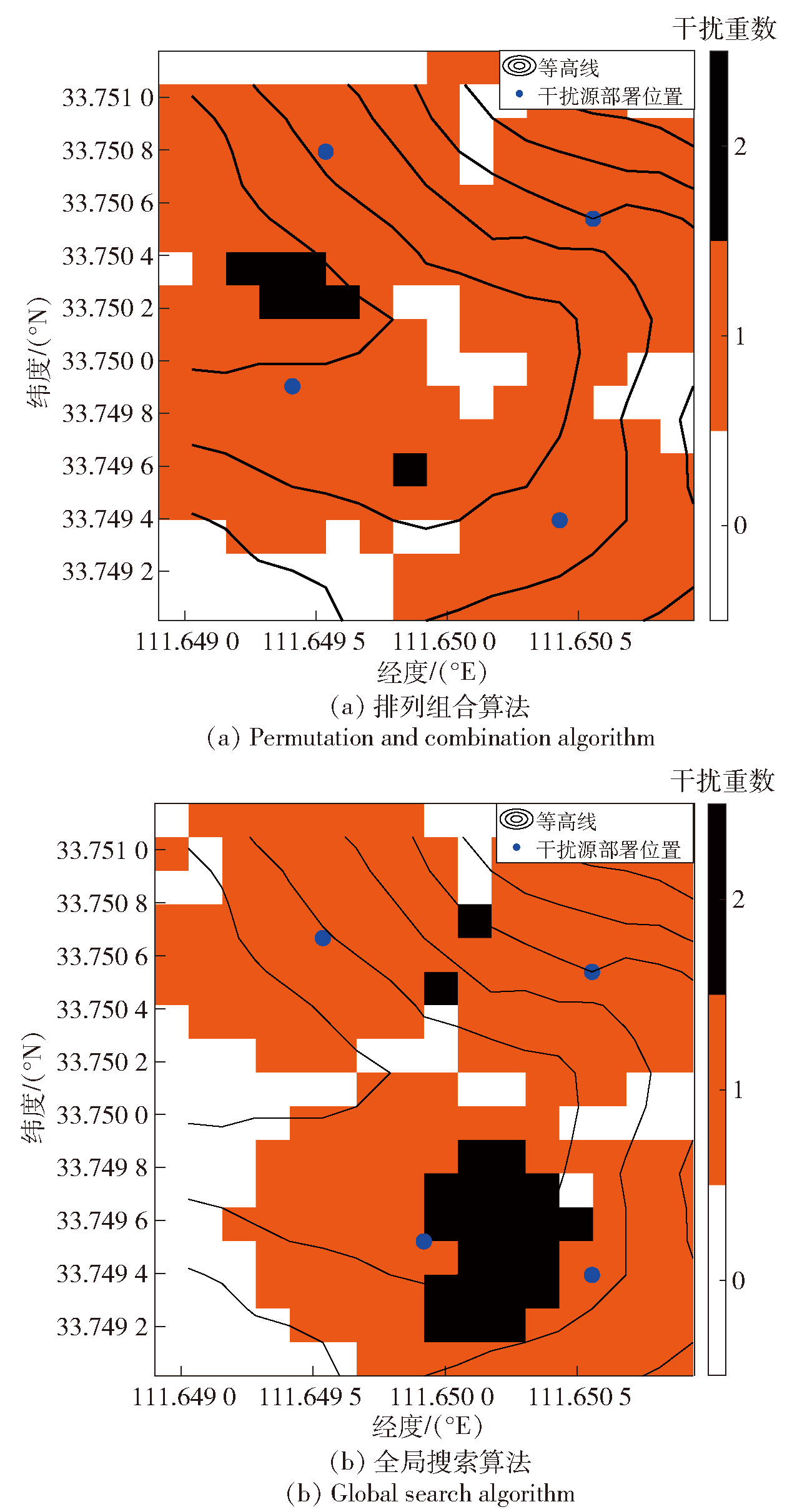
图11 场景2-1干扰源部署分布图
Fig.11 Interference source deployment diagram in Scenario 2-1
| 场景编号 | 组别序号 | 接收机抗干扰能力 (干信比)/dB | 干扰源发射 功率/W | 发射天线 增益/dB | 接收天线 增益/dB | 接收信号 功率/dBw | 干扰源最大 传播距离/km | 任务区域 大小/km2 |
|---|---|---|---|---|---|---|---|---|
| 1-1 | 80 | 1 | 0 | 6 | -160 | 0.3 | 2×2 | |
| 1 | 1-2 | 80 | 1 | 6 | 6 | -160 | 0.6 | 2×2 |
| 1-3 | 80 | 10 | 6 | 4 | -160 | 1.5 | 2×2 | |
| 2-1 | 70 | 1 | 10 | 6 | -160 | 3 | 20×20 | |
| 2 | 2-2 | 70 | 10 | 10 | 2 | -160 | 6 | 20×20 |
| 2-3 | 70 | 10 | 10 | 10 | -160 | 15 | 20×20 |
表4 仿真场景配置2
Table 4 Simulation scenario configuration 2
| 场景编号 | 组别序号 | 接收机抗干扰能力 (干信比)/dB | 干扰源发射 功率/W | 发射天线 增益/dB | 接收天线 增益/dB | 接收信号 功率/dBw | 干扰源最大 传播距离/km | 任务区域 大小/km2 |
|---|---|---|---|---|---|---|---|---|
| 1-1 | 80 | 1 | 0 | 6 | -160 | 0.3 | 2×2 | |
| 1 | 1-2 | 80 | 1 | 6 | 6 | -160 | 0.6 | 2×2 |
| 1-3 | 80 | 10 | 6 | 4 | -160 | 1.5 | 2×2 | |
| 2-1 | 70 | 1 | 10 | 6 | -160 | 3 | 20×20 | |
| 2 | 2-2 | 70 | 10 | 10 | 2 | -160 | 6 | 20×20 |
| 2-3 | 70 | 10 | 10 | 10 | -160 | 15 | 20×20 |
| 场景 编号 | 组别 序号 | 使用干扰源数量 | 干扰源数量差异 百分比/% | 计算时间/s | 耗时减少 百分比/% | 干扰覆盖率/% | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 全局搜 索算法 | 优化算法 | 优化算法 | 全局搜 索算法 | 优化算法 | 优化算法 | 全局搜 索算法 | 优化算法 | |||||||
| 5阶 | 1级 | 5阶 | 1级 | 5阶 | 1级 | 5阶 | 1级 | 5阶 | 1级 | |||||
| 1-1 | 30 | 30 | 36 | 0 | 20 | 392 | 141 | 10 | 64.03 | 97.45 | 80.66 | 80.69 | 80.33 | |
| 1 | 1-2 | 10 | 10 | 14 | 0 | 40 | 1202 | 459 | 11 | 61.81 | 99.17 | 80.95 | 80.80 | 80.28 |
| 1-3 | 4 | 4 | 5 | 0 | 25 | 6288 | 2480 | 44 | 60.56 | 99.30 | 86.20 | 86.20 | 81.71 | |
| 2-1 | 37 | 37 | 41 | 0 | 10.81 | 920 | 356 | 18 | 61.30 | 98.04 | 80.30 | 80.30 | 80.00 | |
| 2 | 2-2 | 16 | 16 | 17 | 0 | 6.25 | 3524 | 1319 | 56 | 62.57 | 98.41 | 81.26 | 80.76 | 80.61 |
| 2-3 | 7 | 7 | 8 | 0 | 14.29 | 15060 | 5655 | 250 | 62.45 | 98.34 | 81.15 | 81.15 | 81.70 | |
表5 仿真程序运行时间与结果差异对比(全局搜索算法与优化搜索算法对比)
Table 5 Simulation program run time and result difference comparison (comparison between global search algorithm and optimal search algorithm)
| 场景 编号 | 组别 序号 | 使用干扰源数量 | 干扰源数量差异 百分比/% | 计算时间/s | 耗时减少 百分比/% | 干扰覆盖率/% | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 全局搜 索算法 | 优化算法 | 优化算法 | 全局搜 索算法 | 优化算法 | 优化算法 | 全局搜 索算法 | 优化算法 | |||||||
| 5阶 | 1级 | 5阶 | 1级 | 5阶 | 1级 | 5阶 | 1级 | 5阶 | 1级 | |||||
| 1-1 | 30 | 30 | 36 | 0 | 20 | 392 | 141 | 10 | 64.03 | 97.45 | 80.66 | 80.69 | 80.33 | |
| 1 | 1-2 | 10 | 10 | 14 | 0 | 40 | 1202 | 459 | 11 | 61.81 | 99.17 | 80.95 | 80.80 | 80.28 |
| 1-3 | 4 | 4 | 5 | 0 | 25 | 6288 | 2480 | 44 | 60.56 | 99.30 | 86.20 | 86.20 | 81.71 | |
| 2-1 | 37 | 37 | 41 | 0 | 10.81 | 920 | 356 | 18 | 61.30 | 98.04 | 80.30 | 80.30 | 80.00 | |
| 2 | 2-2 | 16 | 16 | 17 | 0 | 6.25 | 3524 | 1319 | 56 | 62.57 | 98.41 | 81.26 | 80.76 | 80.61 |
| 2-3 | 7 | 7 | 8 | 0 | 14.29 | 15060 | 5655 | 250 | 62.45 | 98.34 | 81.15 | 81.15 | 81.70 | |
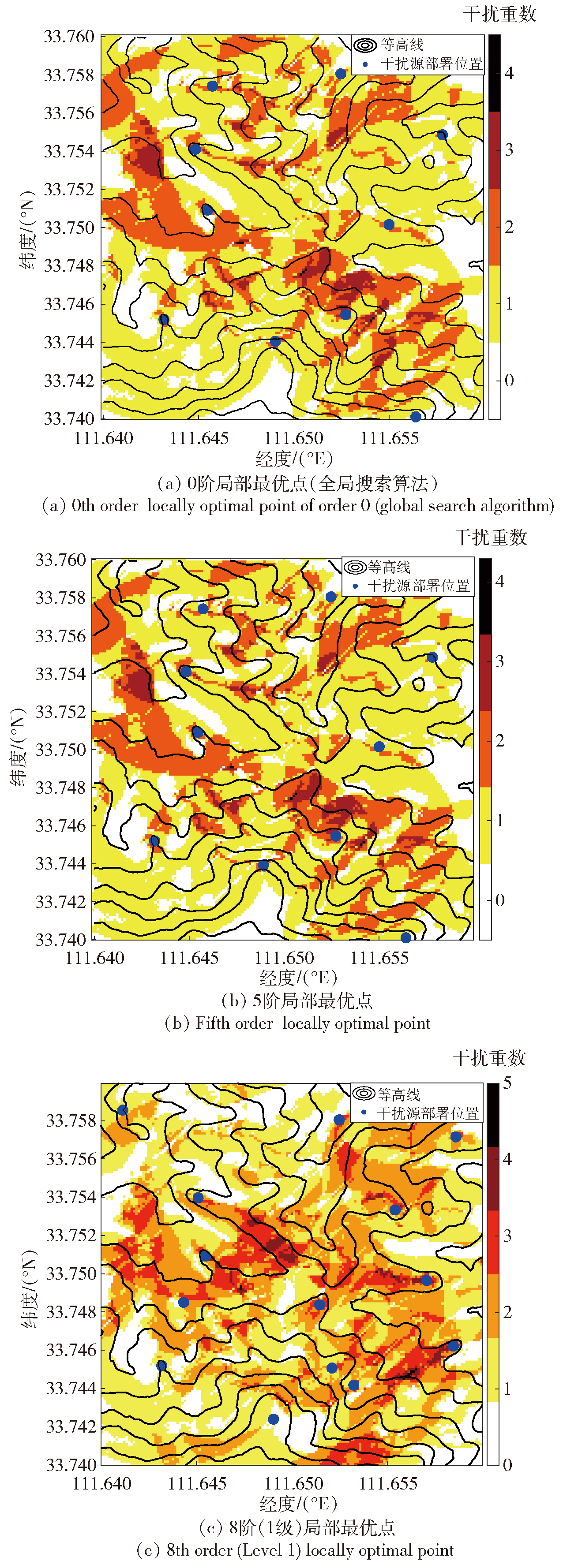
图12 场景1-2干扰源部署分布图
Fig.12 Interference source deployment diagramin Scenario 1-2
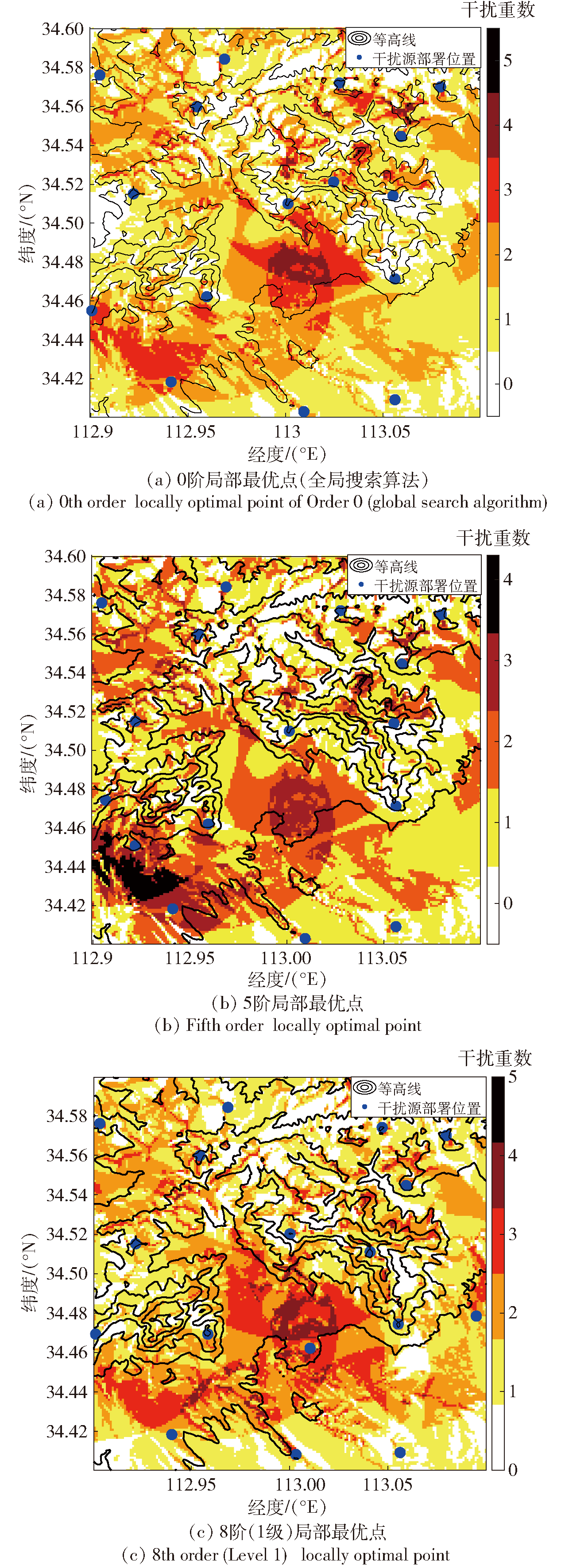
图13 场景2-2干扰源部署分布图
Fig.13 Interference source deployment diagram in Scenario 2-2
| [1] |
|
| [2] |
谭述森. 智能化战场的卫星导航[J]. 科学中国人, 2021(33):34-35.
|
|
|
|
| [3] |
王月, 郝金明, 刘伟平. 卫星导航欺骗干扰装备效能评估方法[J]. 兵工学报, 2020, 41(1):108-118.
doi: 10.3969/j.issn.1000-1093.2020.01.013 |
|
doi: 10.3969/j.issn.1000-1093.2020.01.013 |
|
| [4] |
焦博, 丛佃伟. 导航干扰技术在无人机防御中的应用展望[J]. 无线电工程, 2021, 51(10):1019-1024.
|
|
|
|
| [5] |
|
| [6] |
|
| [7] |
高军辉. 分布式干扰技术研究[D]. 成都: 电子科技大学, 2006.
|
|
|
|
| [8] |
|
| [9] |
程力睿, 张顺健, 曾芳玲. 卫星导航干扰源优化部署方法[J]. 火力与指挥控制, 2015, 40(7):43-46.
|
|
|
|
| [10] |
刘帅, 秦姗姗. 基于自适应遗传算法的空管雷达部署优化[J]. 通信技术, 2018, 51(4):870-874.
|
|
|
|
| [11] |
付钰, 朱克家, 韩奇, 等. 一种导航信号干扰源部署方法[J]. 导航定位学报, 2020, 8(3):114-118.
|
|
|
|
| [12] |
李硕, 徐国伟, 林辉. 基于改进蚁群算法的雷达任务自动部署研究[J]. 国外电子测量技术, 2021, 40(11):41-47.
|
|
|
|
| [13] |
张鑫鑫. GPSⅢ卫星导航干扰方案和干扰源优化部署方法设计[D]. 成都: 电子科技大学, 2017.
|
|
|
|
| [14] |
doi: 10.21629/JSEE.2018.05.09 |
| [15] |
|
| [16] |
李奇. 基于分布式算法的雷达组网抗干扰优化部署研究[D]. 西安: 西安电子科技大学, 2023.
|
|
|
|
| [17] |
|
| [18] |
刘卓承, 张云雷, 刘涛, 等. 基于数据和遗传算法的对海雷达部署优化研究[J]. 指挥控制与仿真, 2023, 45(3):113-118.
doi: 10.3969/j.issn.1673-3819.2023.03.017 |
|
|
|
| [19] |
郭宇翔. 基于通信可视域的基站选址方法研究[D]. 南京: 南京师范大学, 2021.
|
|
|
|
| [20] |
|
| [21] |
|
| [22] |
doi: 10.1016/j.dt.2019.02.001 |
| [23] |
刘丹, 叶小舟, 肖伟, 等. 地形遮挡对GNSS干扰范围影响的高效仿真算法[J]. 系统工程与电子技术, 2020, 42(11):2418-2425.
doi: 10.3969/j.issn.1001-506X.2020.11.02 |
|
|
|
| [24] |
|
| [25] |
林强. 基于Cesium的岛屿高精度地理信息系统及关键技术设计[D]. 南京: 南京邮电大学, 2022.
|
|
|
|
| [26] |
|
| [27] |
|
| [28] |
|
| [1] | 朱建良, 王立雅, 薄煜明. 行人GNSS/PDR组合导航优化估计方法[J]. 兵工学报, 2023, 44(10): 3137-3145. |
| [2] | 沈世斌, 谢非, 赵静, 钱伟行, 康国华, 刘锡祥. 基于相位控制的惯性与卫星超紧组合导航系统信号解调方法[J]. 兵工学报, 2020, 41(3): 495-506. |
| [3] | 宋炜琳, 杨道宁. 基于星间链路的卫星导航系统星地业务信息传输规划调度方法研究[J]. 兵工学报, 2019, 40(8): 1627-1633. |
| [4] | 徐昊玮, 廉保旺, 刘尚波. 基于滑动窗迭代最大后验估计的多源组合导航因子图融合算法[J]. 兵工学报, 2019, 40(4): 807-819. |
| [5] | 闵艳玲, 熊智, 邢丽, 刘建业, 殷德全. 基于对偶四元数的惯性/卫星/天文组合导航系统改进联邦滤波方法[J]. 兵工学报, 2018, 39(2): 315-324. |
| [6] | 肖泽龙, 王华, 周鹏, 韩璐霞, 王元恺, 李潇, 逯暄. 基于机会辐射源的弹载探测卫星优选方法[J]. 兵工学报, 2017, 38(8): 1555-1562. |
| [7] | 王丹青, 李萍, 朱永忠. 北斗导航/超短波通信双模三频一体化终端天线的研究与设计[J]. 兵工学报, 2016, 37(12): 2284-2292. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4