
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2024, Vol. 45 ›› Issue (2): 628-640.doi: 10.12382/bgxb.2022.0631
金秋延1, 刘福祥1,*( ), 王新春2, 刘晓3, 莫波1
), 王新春2, 刘晓3, 莫波1
收稿日期:2022-07-12
上线日期:2024-02-29
通讯作者:
基金资助:
JIN Qiuyan1, LIU Fuxiang1,*(), WANG Xinchun2, LIU Xiao3, MO Bo1
Received:2022-07-12
Online:2024-02-29
摘要:
在末制导阶段,由于制导目标位于弹体纵轴附近,滚仰式结构的导引头易出现奇异性问题而难以精确跟踪目标。针对上述问题,提出基于斜置方案的滚仰式导引头过顶奇异问题控制策略。在导引头稳定平台相对弹体斜置边界俯仰框架角的基础上,通过控制弹体的滚转运动,保证导引头光轴始终避开过顶奇异区域,实现目标位于弹体纵轴附近和斜置导引头初始光轴附近两个过顶奇异区域的稳定跟踪。研究结果表明:所提策略相比于增设第三轴的方法,导引头体积小、质量轻;相比于分区域变参数控制策略,解决了静止和减速控制时过顶奇异区域内导引头对视线角速度跟踪失效的问题;仿真对比结果验证了所提策略具有跟踪精确度高、有效抑制控制系统失稳、降低探测器失调角的特点。
中图分类号:
金秋延, 刘福祥, 王新春, 刘晓, 莫波. 滚仰式导引头斜置方案下的过顶奇异问题控制策略[J]. 兵工学报, 2024, 45(2): 628-640.
JIN Qiuyan, LIU Fuxiang, WANG Xinchun, LIU Xiao, MO Bo. The Control Strategy of Zenith-pass Singularity Problem Under the Roll-pitch Seeker Oblique Scheme[J]. Acta Armamentarii, 2024, 45(2): 628-640.
图1 坐标系转换关系
Fig.1 Coordinate transformation relationship
图2 导引头控制过程结构图
Fig.2 Structure diagram of seeker control process
图3 框架角指令随θs和εz变化
Fig.3 Change of frame angle instructions with θs and εz

图4 框架角指令随θs和εz变化
Fig.4 Change of frame angle instructions with θs and εz
图5 斜置方案下滚仰式导引头过顶奇异控制策略
Fig.5 Zenith-pass singularity control strategy of roll-pitch seeker under oblique scheme
图6 斜置稳定平台示意图
Fig.6 Schematic diagram of oblique stable platform
图7 斜置前后稳定平台过顶区域示意图
Fig.7 Schematic diagram of zenith-pass area for stabilized platform before and after inclination
图8 弹体滚转控制策略
Fig.8 Strategy for projectile roll control
图9 弹体滚转示意图
Fig.9 Schematic diagram of projectile rolling
图10 斜置导引头坐标系转换关系
Fig.10 Coordinate transformation relationship of oblique seeker
图11 控制系统模型
Fig.11 Control system model
| 通道 | La/ mH | Ra/ Ω | Km/ (n·m·A-1) | Ke/ (V·s·rad-1) | J/ (kg·m2) |
|---|---|---|---|---|---|
| 俯仰 | 0.002 | 8 | 0.234 | 0.234 | 0.003 |
| 滚转 | 0.002 | 8 | 0.234 | 0.234 | 0.003 |
表1 电机模型参数
Table 1 Parameters of motor model
| 通道 | La/ mH | Ra/ Ω | Km/ (n·m·A-1) | Ke/ (V·s·rad-1) | J/ (kg·m2) |
|---|---|---|---|---|---|
| 俯仰 | 0.002 | 8 | 0.234 | 0.234 | 0.003 |
| 滚转 | 0.002 | 8 | 0.234 | 0.234 | 0.003 |
| 通道 | 环路 | KP | KI | KD |
|---|---|---|---|---|
| 俯仰 | 位置环 | 191.5 | 0 | 0 |
| 速度环 | 204.97 | 329 | 0 | |
| 滚转 | 位置环 | 71 | 0 | 0 |
| 速度环 | 204.97 | 329 | 0 |
表2 PID控制器参数
Table 2 Parameters of PID controller
| 通道 | 环路 | KP | KI | KD |
|---|---|---|---|---|
| 俯仰 | 位置环 | 191.5 | 0 | 0 |
| 速度环 | 204.97 | 329 | 0 | |
| 滚转 | 位置环 | 71 | 0 | 0 |
| 速度环 | 204.97 | 329 | 0 |
图12 速度环伯德图
Fig.12 Bode diagram of speed loop
图13 俯仰通道位置环伯德图
Fig.13 Bode diagram of pitch channel position loop
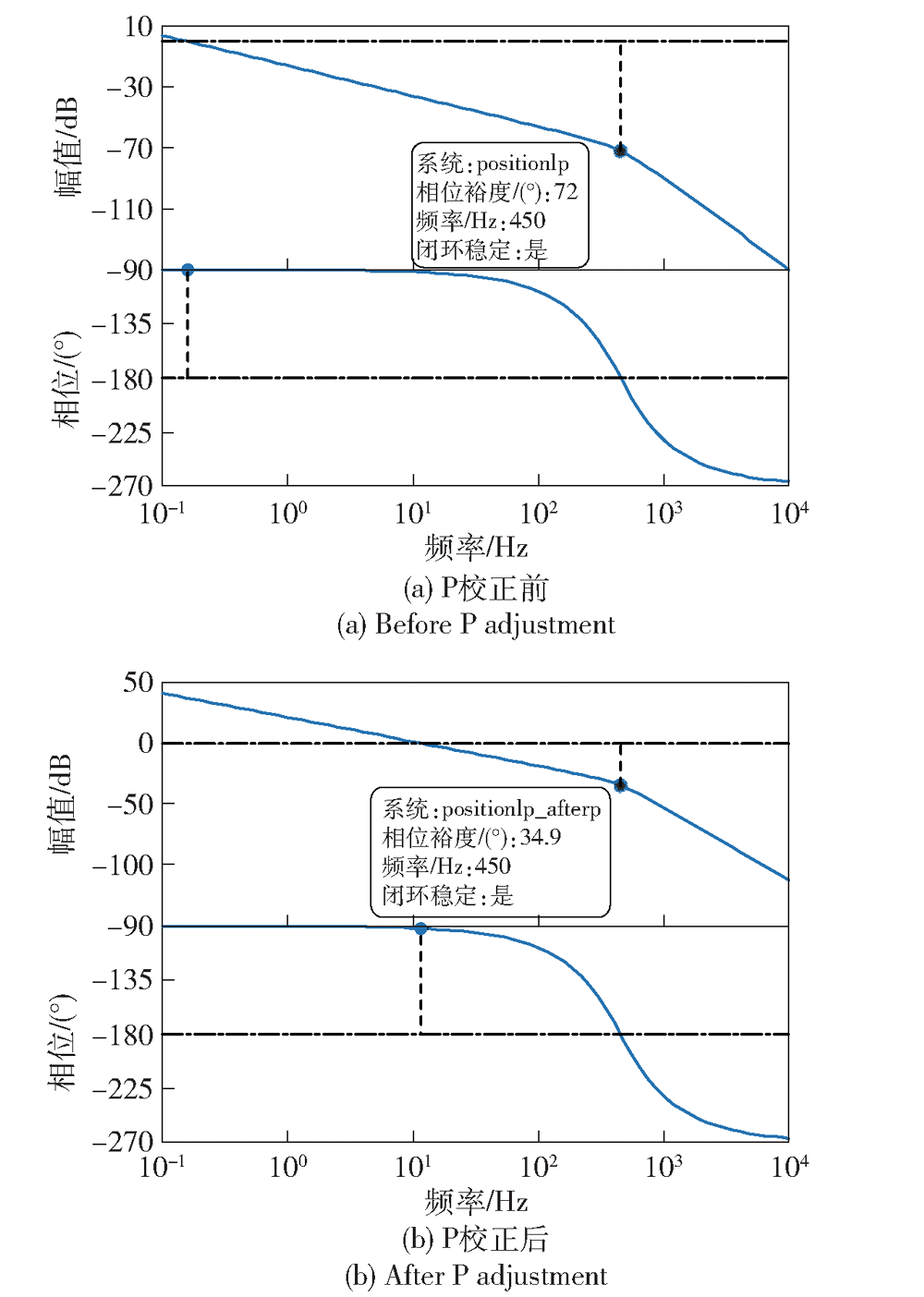
图14 滚转通道位置环伯德图
Fig.14 Bode diagram of roll channel position loop
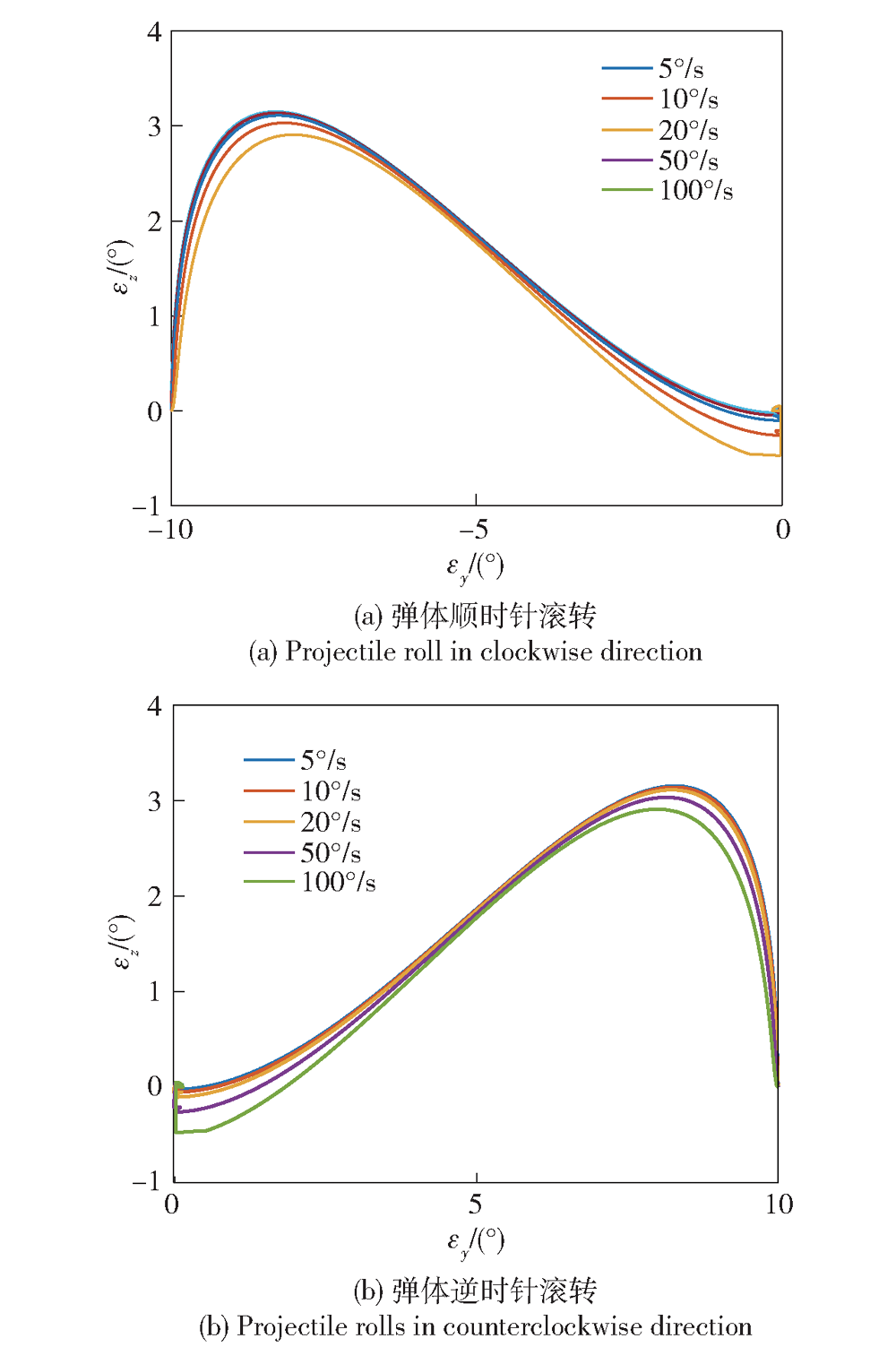
图15 导引头探测器上目标运动轨迹
Fig.15 Target trajectory on seeker detector
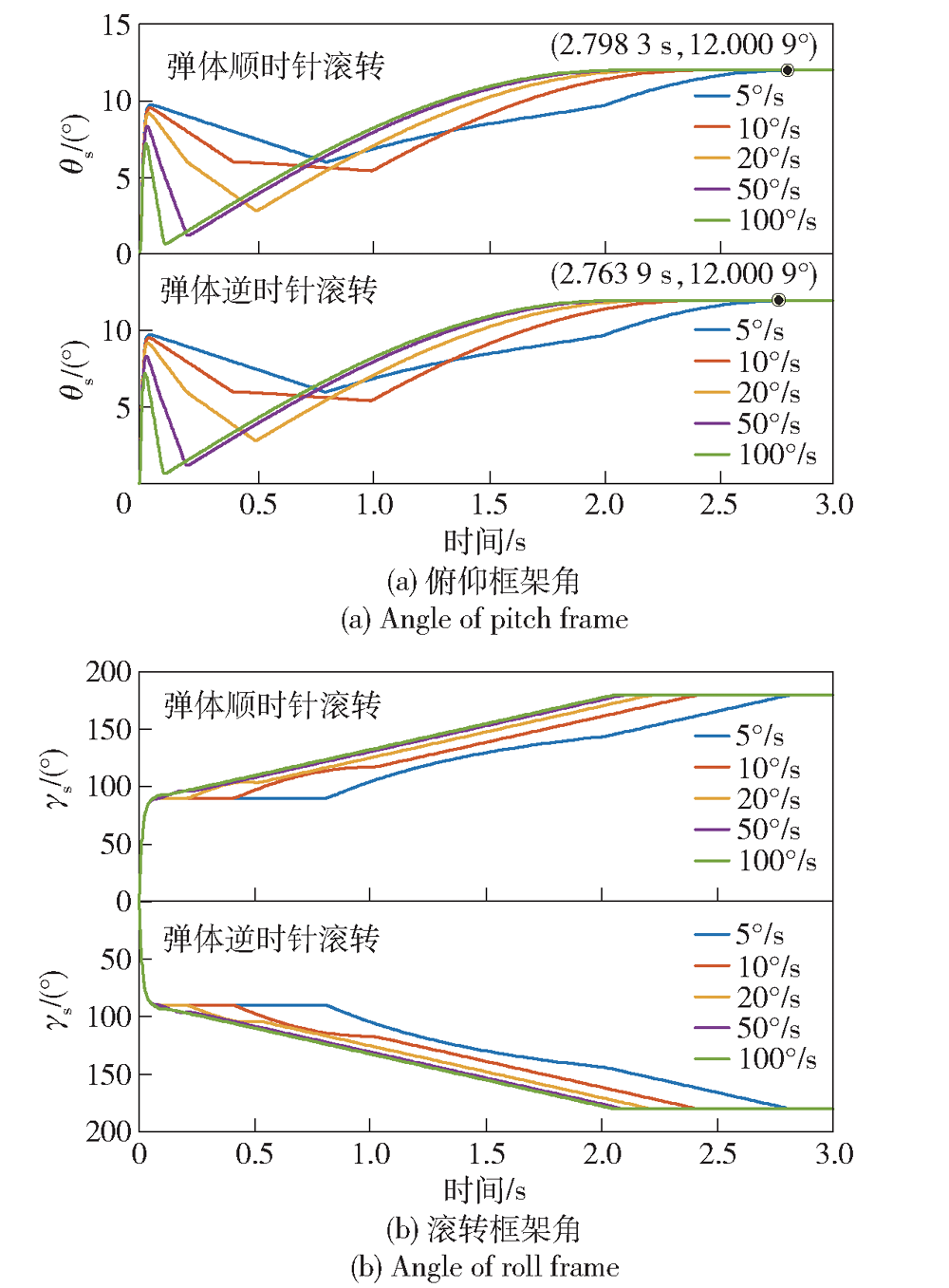
图16 导引头俯仰和滚转框架角随时间变化
Fig.16 Change of seeker’s pitch and roll frame angle with time
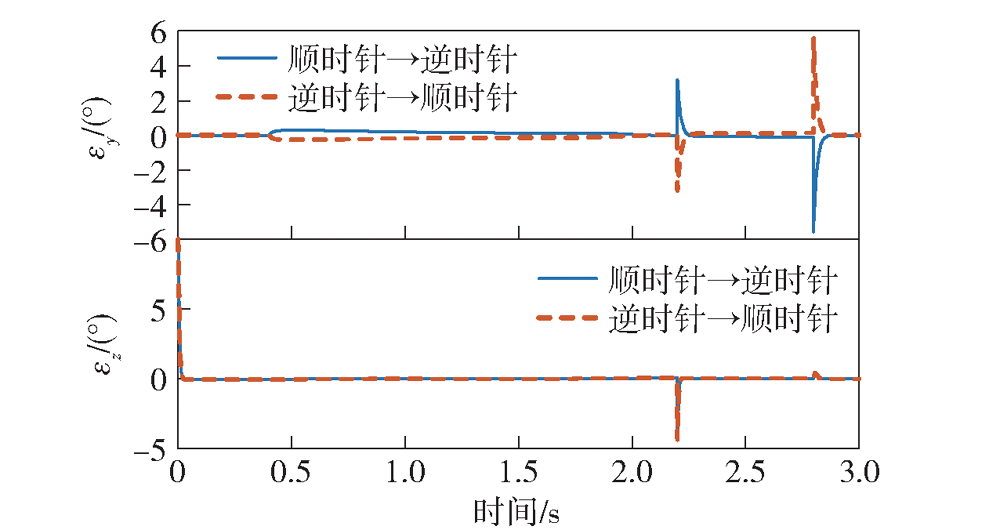
图17 探测器俯仰和偏航误差角随时间变化
Fig.17 Frame of detector’s pitch and yaw error angles varying with time
图18 导引头俯仰和滚转框架响应
Fig.18 Response of seeker pitch and roll frames
图19 探测器误差角
Fig.19 Diagram of detector error angle
图20 俯仰通道
Fig.20 Pitch channel
图21 滚转通道
Fig.21 Roll channel
| [1] |
夏晓雷. 基于滚-仰式结构的导引头控制技术研究[D]. 成都: 电子科技大学, 2021.
|
|
|
|
| [2] |
|
| [3] |
doi: 10.2514/1.G002063 URL |
| [4] |
doi: 10.1088/1742-6596/2085/1/012017 |
| [5] |
|
| [6] |
王志伟. 滚-仰式半捷联导引头总体技术研究[D]. 北京: 北京理工大学, 2008.
|
|
|
|
| [7] |
林德福, 王志伟, 王江. 滚-仰式导引头奇异性分析与控制[J]. 北京理工大学学报, 2010, 30(11): 1265-1269.
|
|
|
|
| [8] |
|
| [9] |
doi: 10.1109/TCST.2021.3095390 URL |
| [10] |
doi: 10.2514/1.G002507 URL |
| [11] |
孟伟, 朱学平, 邱峰, 等. 滚仰式导引头过顶问题的抗饱和控制研究[J]. 科学技术与工程, 2013, 13(25): 7505-7509.
|
|
|
|
| [12] |
doi: 10.1016/j.ijleo.2019.162935 URL |
| [13] |
王远飞, 刘晓利, 陈志华. 速率稳定滚仰式导引头跟踪回路自抗扰控制器设计与仿真[J]. 航空兵器, 2020, 27(1):64-70.
|
|
|
|
| [14] |
毕寻. 车载低轨卫星测量站跟踪关键技术研究[D]. 长春: 中国科学院大学, 2019.
|
|
|
|
| [15] |
刘晓. 基于全向攻击空空导弹的滚仰式导引头控制技术研究[D]. 北京: 北京理工大学, 2020.
|
|
|
|
| [16] |
周立新, 郝耀峰, 安睿, 等. 一种抑制雷达天线高仰角跟踪抖动的控制方法[J]. 无线电工程, 2019, 49(11): 1000-1003.
|
|
|
|
| [17] |
解邦福, 杨冬冬, 杨国敏. 三轴过顶跟踪中互耦误差分析及补偿技术[J]. 宇航计测技术, 2017, 37(4): 20-24.
|
|
|
|
| [18] |
白瑞. 滚仰导引头关键技术及其在空空导弹上的应用研究[D]. 北京: 北京理工大学, 2017.
|
|
|
|
| [19] |
doi: 10.1016/j.ast.2011.08.011 URL |
| [20] |
|
| [21] |
doi: 10.1016/j.ast.2019.04.013 URL |
| [22] |
王成, 王旭刚, 朱胤. 弹体转速对炮弹控制耦合影响与解耦方法[J]. 电光与控制, 2021, 28(7): 103-107.
|
|
|
|
| [23] |
王帅为, 梁益铭, 郑建强, 等. 滚摆导引头视线角速率提取技术[J]. 红外技术, 2021, 43(6):592-596.
|
|
|
|
| [24] |
doi: 10.1016/j.ijleo.2016.08.071 URL |
| [25] |
doi: 10.23919/JSEE.2021.000127 |
| [26] |
陈思远, 谢伟, 刘石祥, 等. 滚仰式导引头稳定和跟踪特性研究[J]. 电子机械工程, 2021, 37(2):60-64.
|
|
|
| [1] | 彭博, 岑梦希. 速度匹配加机动辅助的滚转弹滚转角空中对准法[J]. 兵工学报, 2019, 40(7): 1390-1400. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4