
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (8): 240751-.doi: 10.12382/bgxb.2024.0751
周乐1,2, 尹乔之1,2,3, 钟沛霖1,2, 魏小辉1,2,4,*( ), 聂宏1,2,3
), 聂宏1,2,3
收稿日期:2024-08-30
上线日期:2025-08-28
通讯作者:
基金资助:
ZHOU Le1,2, YIN Qiaozhi1,2,3, ZHONG Peilin1,2, WEI Xiaohui1,2,4,*(), NIE Hong1,2,3
Received:2024-08-30
Online:2025-08-28
摘要:
无人机作为一种新型飞行器,正在逐步融入现代武器装备体系,成为军事领域中不可或缺的重要组成部分。为了使无人机具备安全的着陆决策系统,能够在没有地面标识的情况下自主地执行降落任务,提出一种基于多传感器数据融合从粗到精的分阶段自主择址技术。基于图像信息进行语义分割、实现粗糙落点搜索,在引导无人机降低飞行高度之后,基于点云信息的高程值计算地形参数、构建地形成本图,并考虑地形的类别融合图像语义信息,完成精细落点搜索。试验结果表明:该技术能够很好地划分出安全区域和危险区域,能够使无人机自主获取安全的着陆位置;在精细落点搜索阶段中通过与拟合点云平面实现决策的方式进行对比分析,验证了该技术能够较大程度地节省决策时间,提高择址效率。
中图分类号:
周乐, 尹乔之, 钟沛霖, 魏小辉, 聂宏. 基于数据融合的无人机自主择址技术[J]. 兵工学报, 2025, 46(8): 240751-.
ZHOU Le, YIN Qiaozhi, ZHONG Peilin, WEI Xiaohui, NIE Hong. Autonomous UAV Location Selection Technique Based on Data Fusion[J]. Acta Armamentarii, 2025, 46(8): 240751-.

图1 UAV分阶段择址框架
Fig.1 Phased UAV landing location selection framework
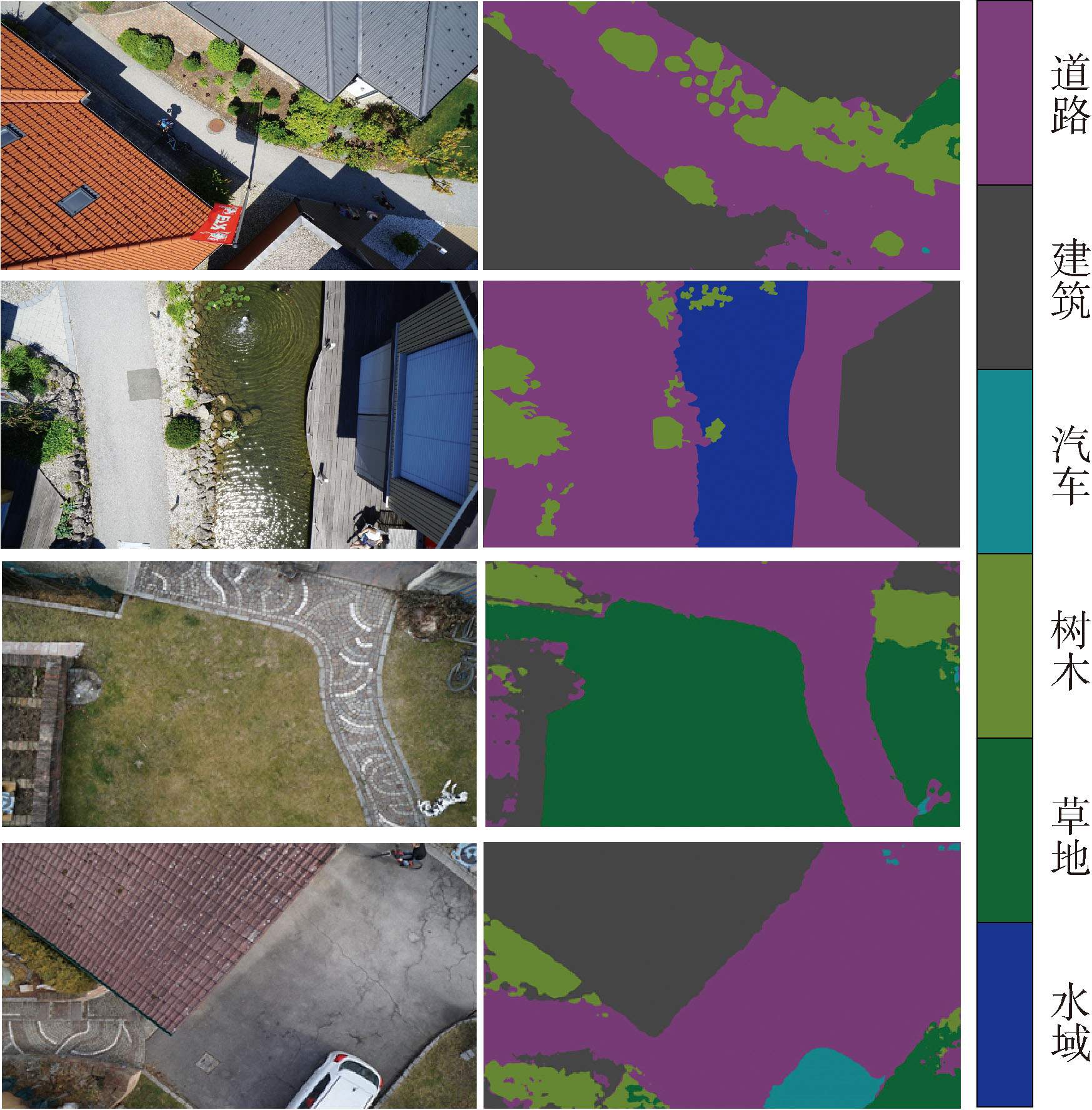
图2 模型可视化结果(左为测试图,右为预测图)
Fig.2 Visualization results of the model(left :test images,right:predicted results)

图3 基于图像的落点搜索流程图
Fig.3 Flowchart of image-based landing point search

图4 地形成本图的构建
Fig.4 Construction of terrain cost map

图5 室外仿真环境
Fig.5 Outdoor simulation environment
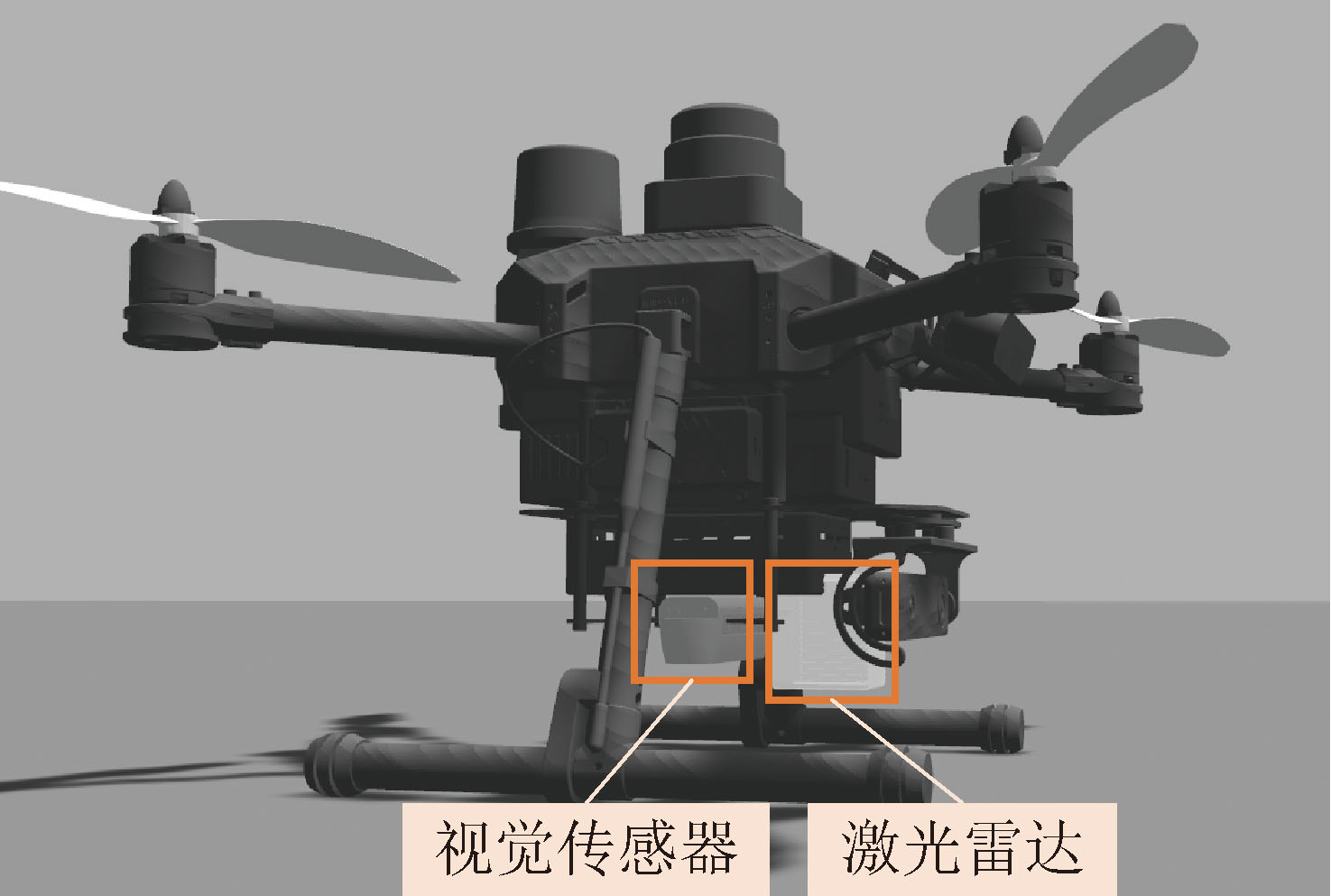
图6 加装传感器的UAV模型
Fig.6 UAV model with sensors
| 参数 | 数值 |
|---|---|
| 焦距/pixel | 639.997649 |
| 视场角/(°) | 69×42 |
| 分辨率 | 640×480 |
| 畸变系数 | [0,0,0,0,0] |
| 帧率/(帧·s-1) | 30 |
表1 仿真中视觉传感器的性能参数
Table 1 Performance parameters of vision sensor in simulation
| 参数 | 数值 |
|---|---|
| 焦距/pixel | 639.997649 |
| 视场角/(°) | 69×42 |
| 分辨率 | 640×480 |
| 畸变系数 | [0,0,0,0,0] |
| 帧率/(帧·s-1) | 30 |
| 参数 | 取值 |
|---|---|
| 扫描模式 | 非重复式扫描 |
| 测量范围/m | 190 |
| 视场角/(°) | 70.4×77.2 |
| 输出/(点·次-1) | 24000 |
| 更新频率/Hz | 10 |
表2 仿真中激光雷达的性能参数
Table 2 Performance parameters of LiDAR in simulation
| 参数 | 取值 |
|---|---|
| 扫描模式 | 非重复式扫描 |
| 测量范围/m | 190 |
| 视场角/(°) | 70.4×77.2 |
| 输出/(点·次-1) | 24000 |
| 更新频率/Hz | 10 |

图7 高空图像
Fig.7 Upper-air image

图8 高空语义图像
Fig.8 Upper-air semantic image

图9 二值图像
Fig.9 Binary image

图10 初步择址结果
Fig.10 Preliminary result of location selection
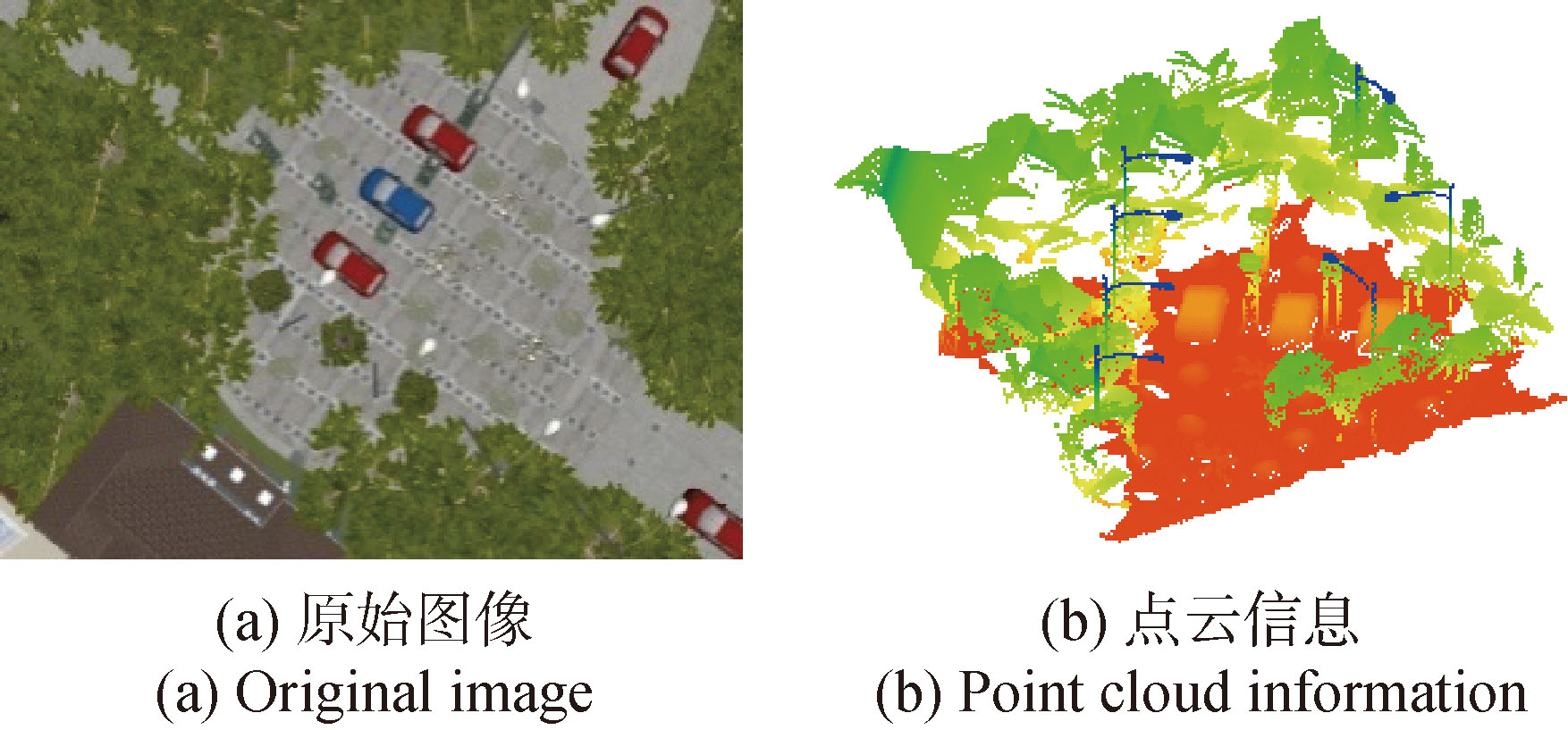
图11 低空下传感器采集的信息
Fig.11 The information collected at low altitude
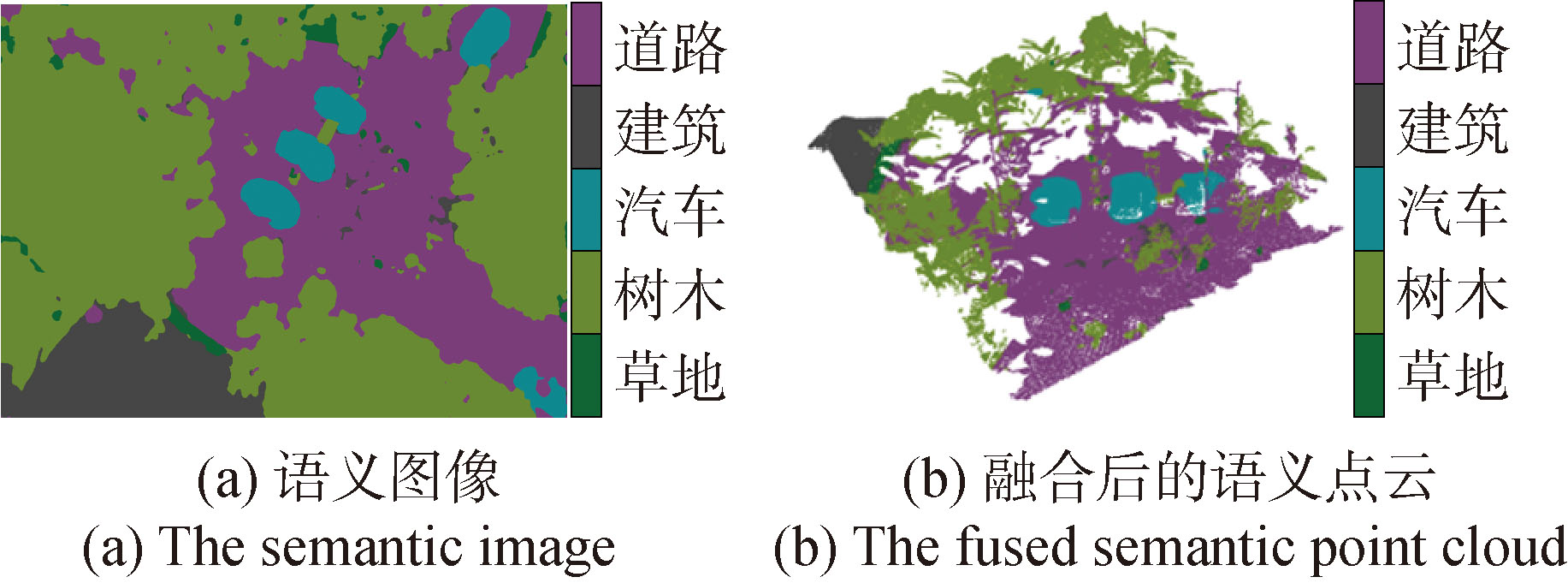
图12 低空下的语义信息
Fig.12 The semantic information at low altitude
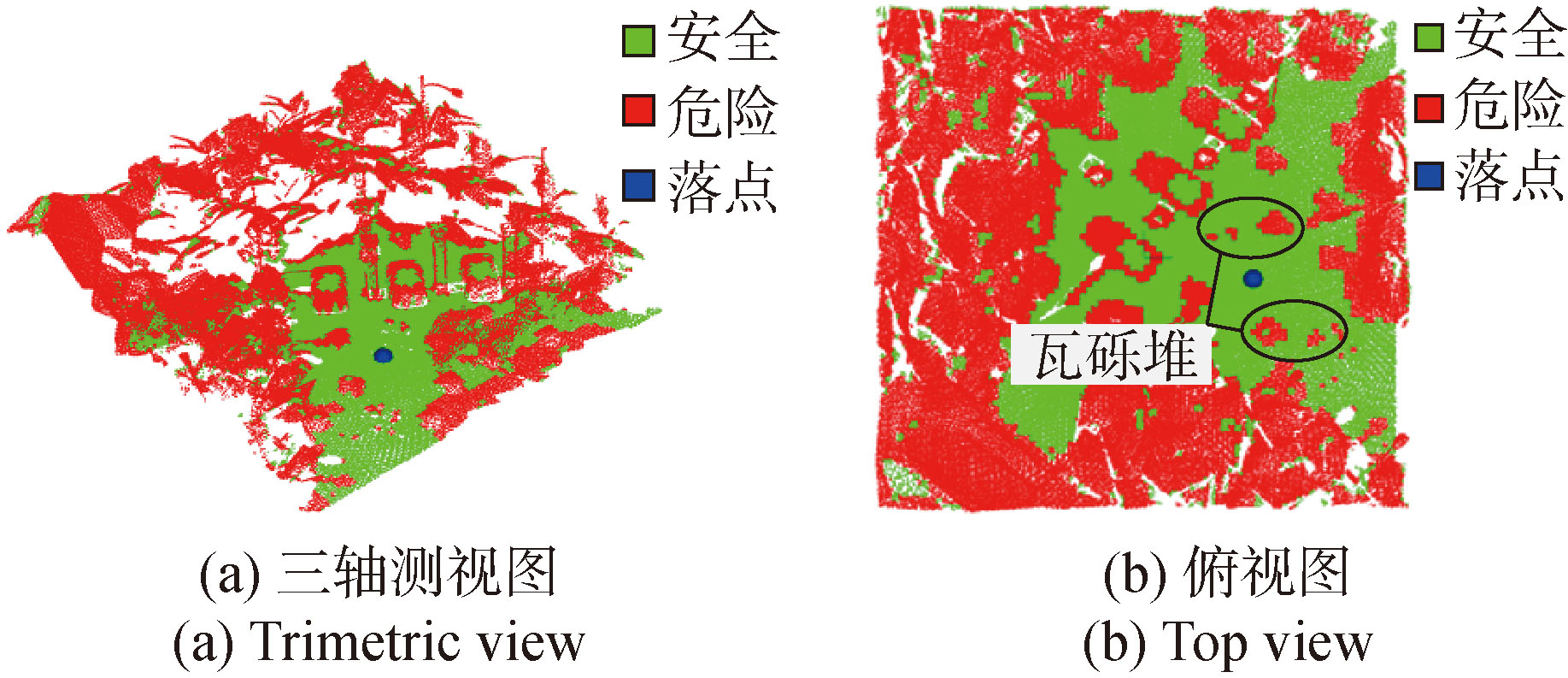
图13 基于平面拟合筛选最佳着陆点
Fig.13 The best landing point screened based on plane fitting

图14 点云高程值与地形参数网格示意图
Fig.14 The schematic diagrams of the elevation values of point cloud and the terrain parameter grid
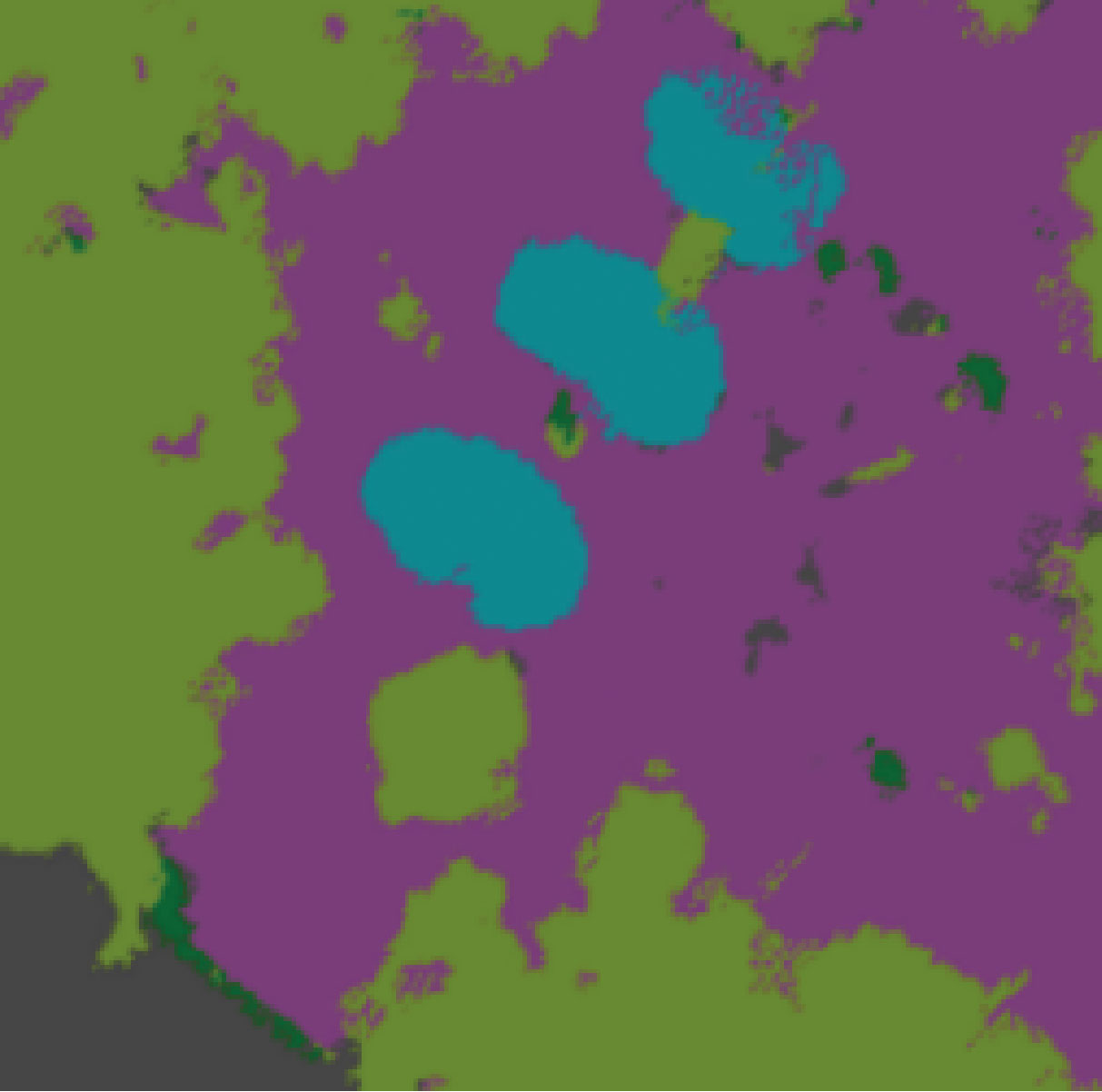
图15 点云语义网格图
Fig.15 Point cloud semantic grid diagram

图16 地形成本图
Fig.16 Terrain cost map
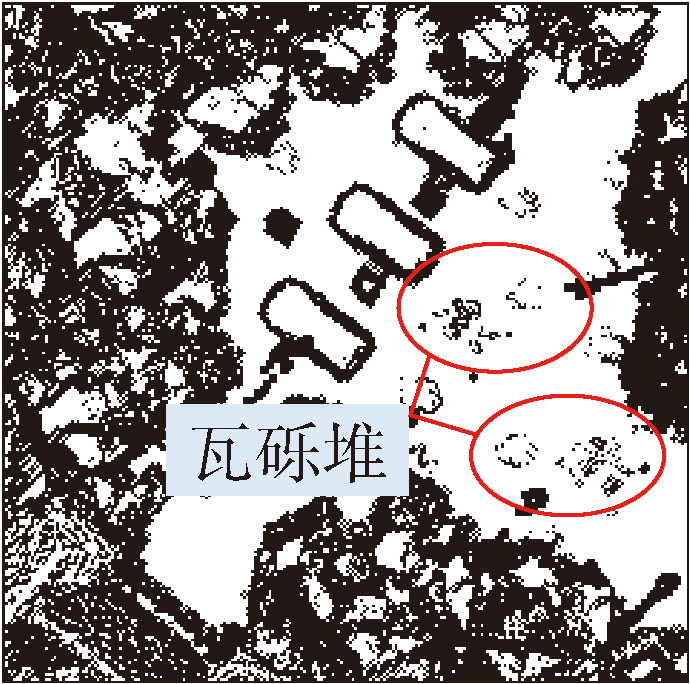
图17 安全-危险网格图
Fig.17 Safe-hazard grid map
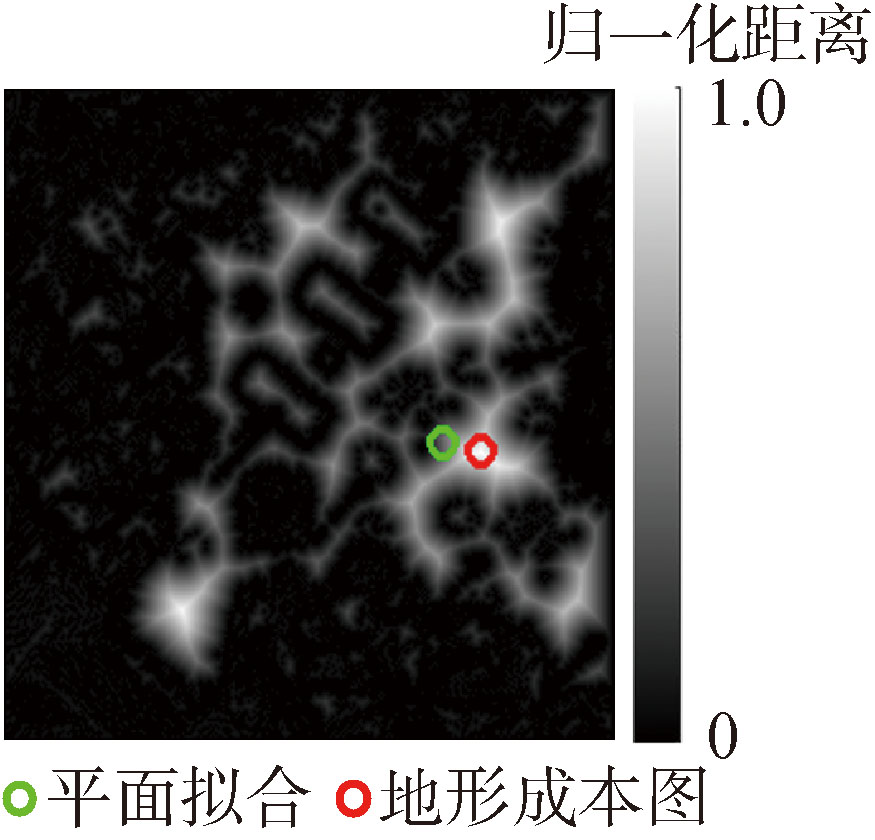
图18 安全距离图
Fig.18 Safety distance map
| 参数 | 平面拟合 | 地形成本图 |
|---|---|---|
| 点云数量/个 | 225881 | 225881 |
| 最佳点坐标/m | (5.23,-1.07,-18.24) | (6.75,-1.35,-18.24) |
| 运行时间/s | 1.1787 | 0.1437 |
表3 精细落点搜索阶段的仿真结果对比
Table 3 Comparison of simulated results in the fine landing point search stage
| 参数 | 平面拟合 | 地形成本图 |
|---|---|---|
| 点云数量/个 | 225881 | 225881 |
| 最佳点坐标/m | (5.23,-1.07,-18.24) | (6.75,-1.35,-18.24) |
| 运行时间/s | 1.1787 | 0.1437 |
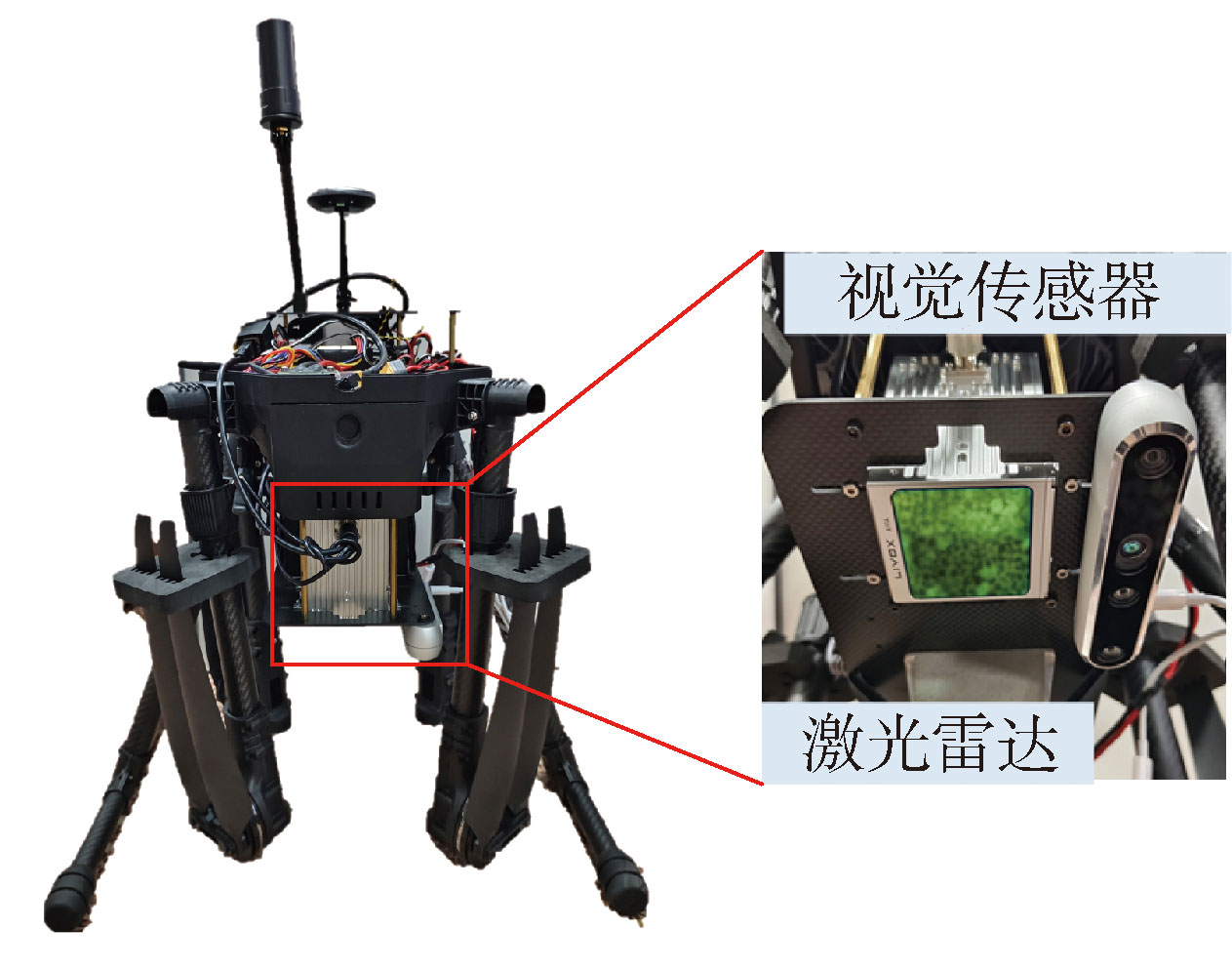
图19 具备择址系统的真实UAV
Fig.19 A real UVA with a location selection system
| 设备 | 类型 | 参数 |
|---|---|---|
| 视觉传感器 | Realsense D455 | RGB摄像头 分辨率:640×480 视场角:90° × 65° 帧率:30帧/s |
| 激光雷达 | Livox avia | 量程:190m @10%反射率 扫描模式:非重复扫描 视场角:70.4°×77.2° 点云输出:240000点/s |
表4 部分传感器的详细信息
Table 4 Detailed information of some sensors
| 设备 | 类型 | 参数 |
|---|---|---|
| 视觉传感器 | Realsense D455 | RGB摄像头 分辨率:640×480 视场角:90° × 65° 帧率:30帧/s |
| 激光雷达 | Livox avia | 量程:190m @10%反射率 扫描模式:非重复扫描 视场角:70.4°×77.2° 点云输出:240000点/s |
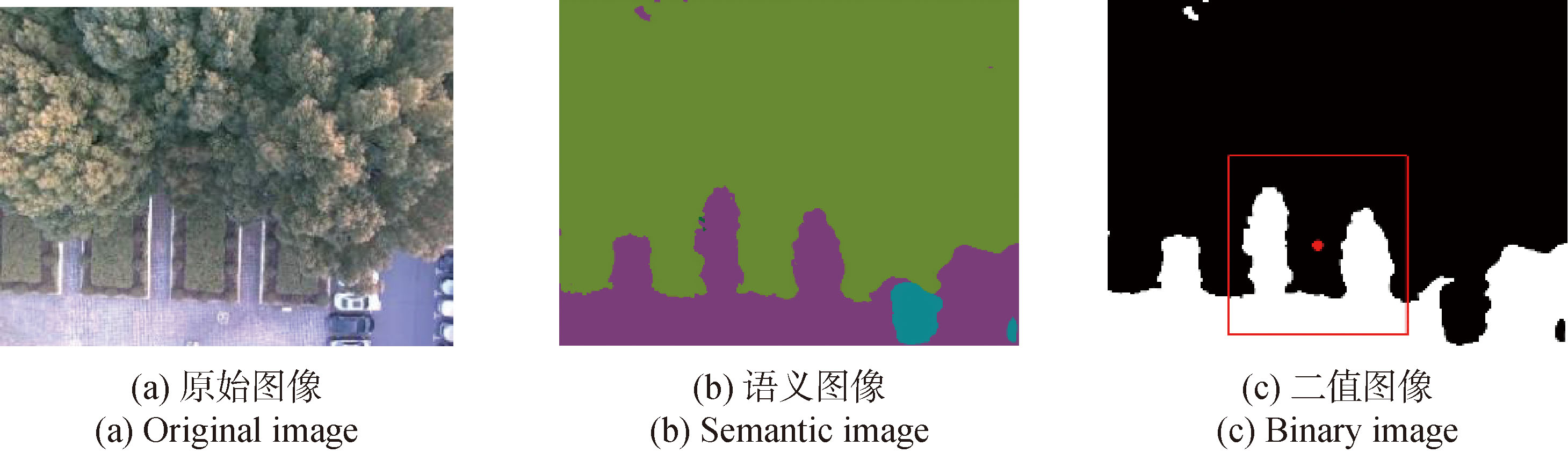
图20 场景1粗糙落点搜索
Fig.20 Scenario 1 Rough landing point search
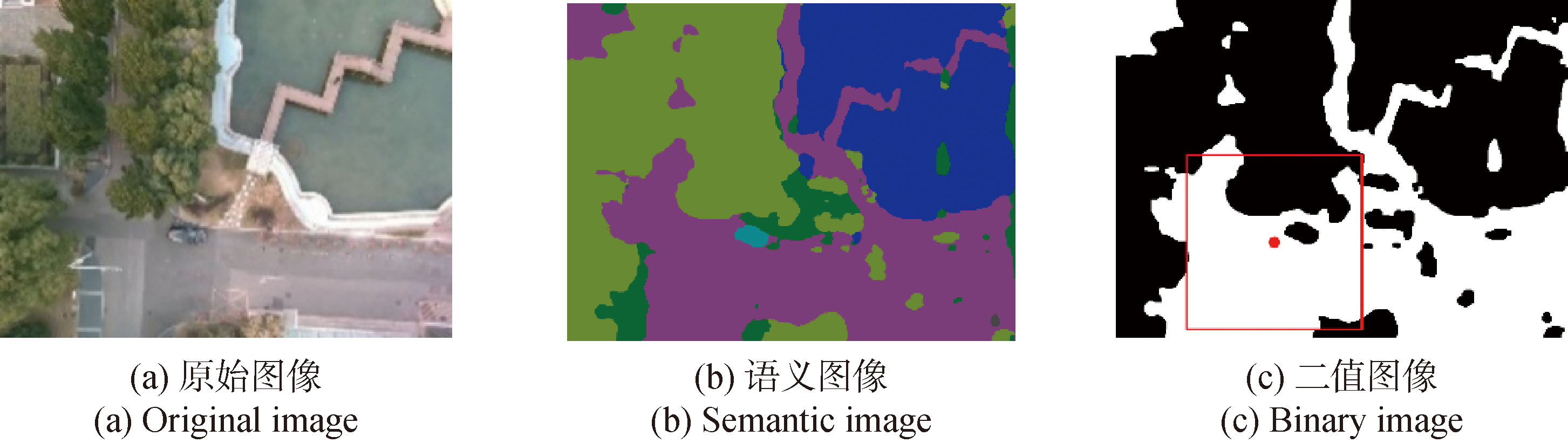
图21 场景2粗糙落点搜索
Fig.21 Scenario 2 Rough landing point search
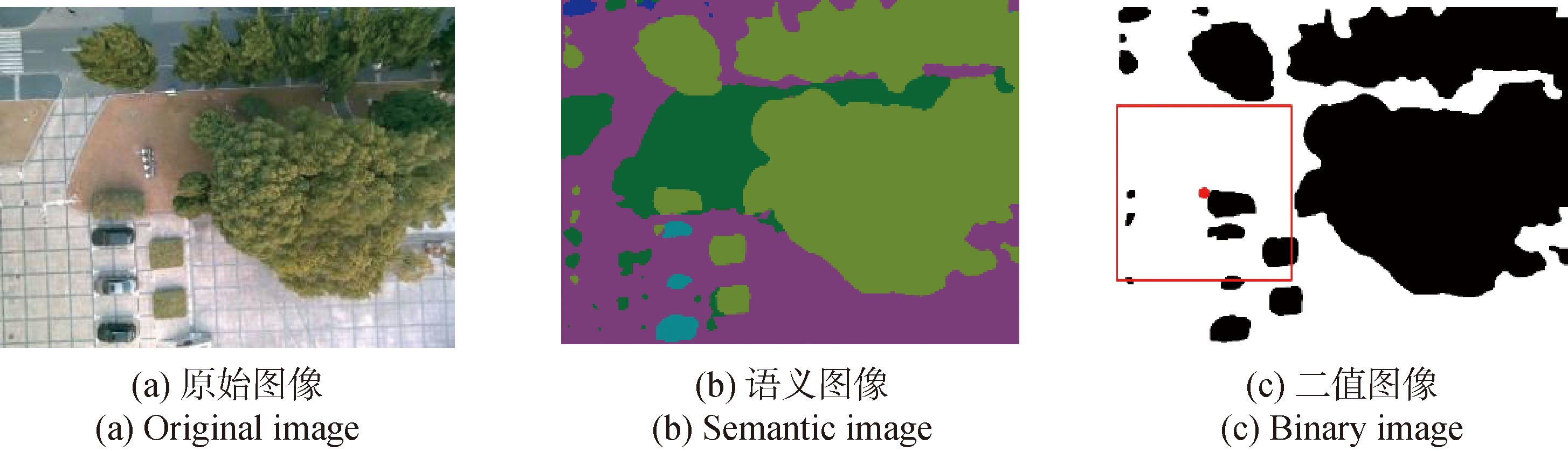
图22 场景3粗糙落点搜索
Fig.22 Scenario 3 Rough landing point search
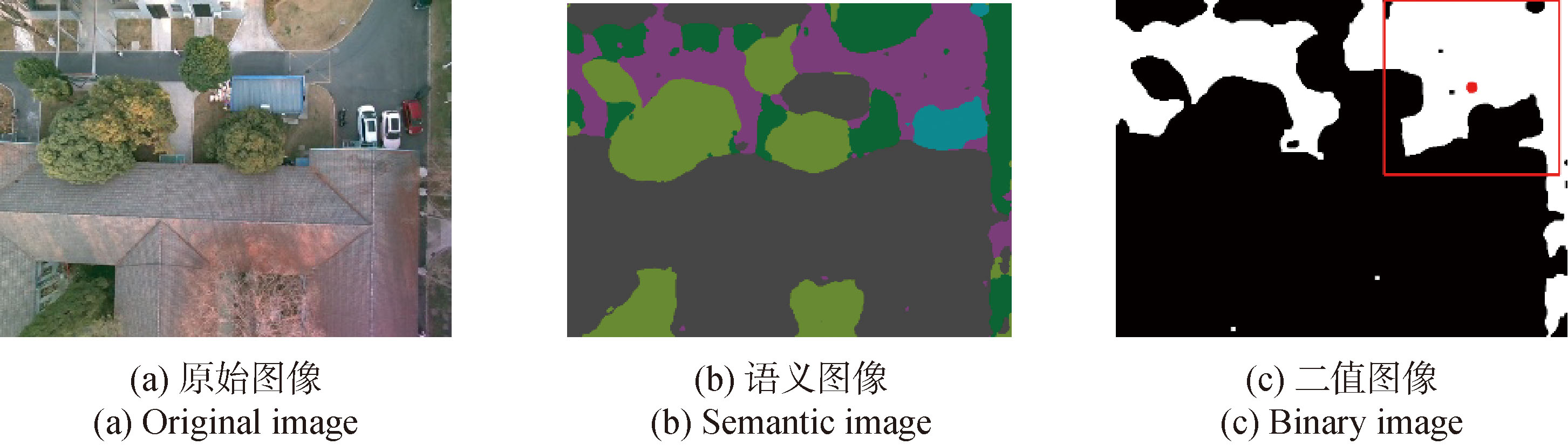
图23 场景4粗糙落点搜索
Fig.23 Scenario 4 Rough landing point search
| 场景 | 图像尺寸/pixel | 像素坐标/pixel | 时间/s |
|---|---|---|---|
| 场景1 | 640×480 | (284,344) | 0.077 |
| 场景2 | 640×480 | (224,344) | 0.071 |
| 场景3 | 640×480 | (124,264) | 0.073 |
| 场景4 | 640×480 | (504,124) | 0.074 |
表5 粗糙落点搜索阶段的真实试验结果
Table 5 Real test results in the rough landing point search phase
| 场景 | 图像尺寸/pixel | 像素坐标/pixel | 时间/s |
|---|---|---|---|
| 场景1 | 640×480 | (284,344) | 0.077 |
| 场景2 | 640×480 | (224,344) | 0.071 |
| 场景3 | 640×480 | (124,264) | 0.073 |
| 场景4 | 640×480 | (504,124) | 0.074 |

图24 场景1精细落点搜索
Fig.24 Scenario 1 Fine landing point search
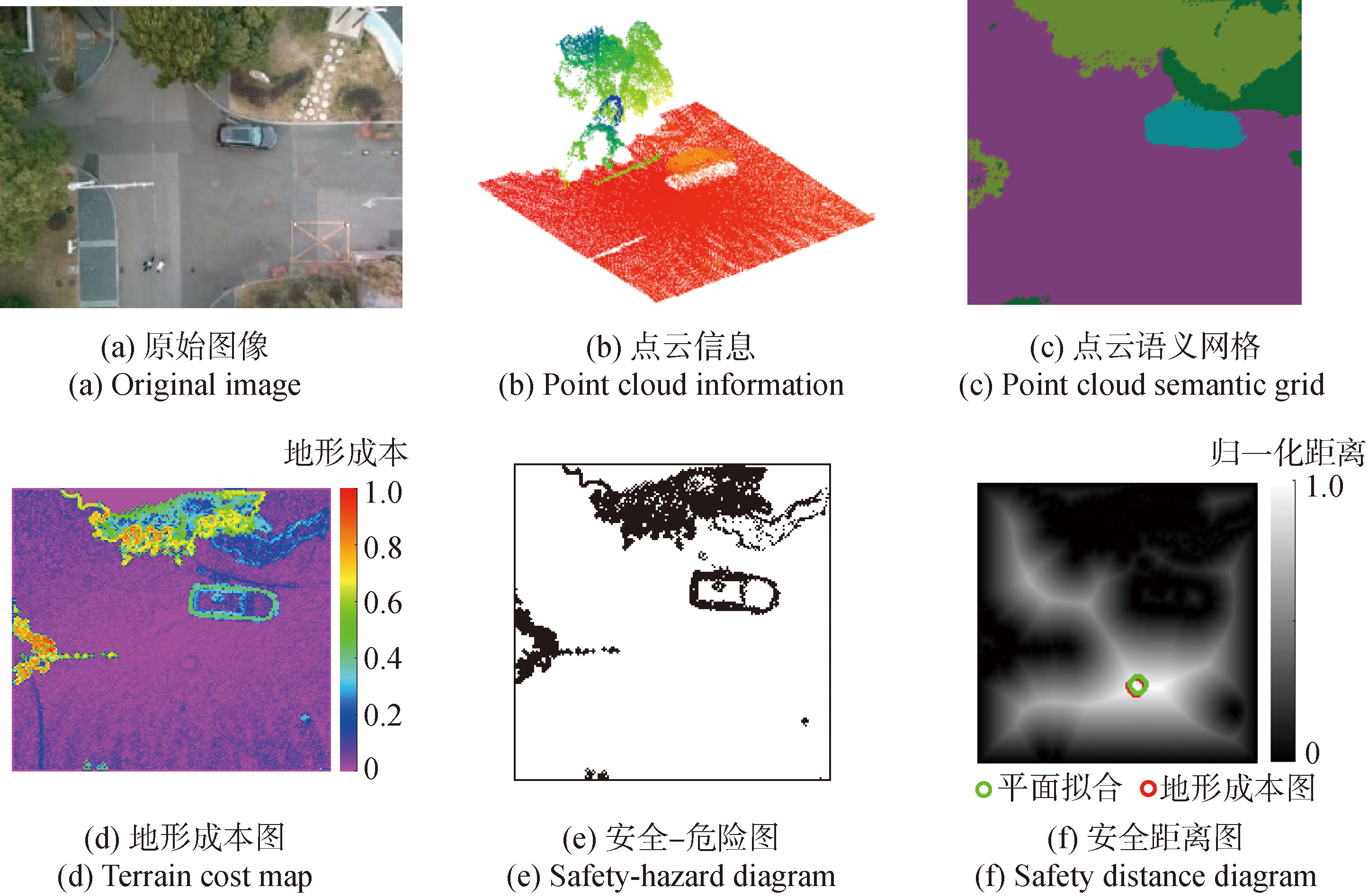
图25 场景2精细落点搜索
Fig.25 Scenario 2 Fine landing point search
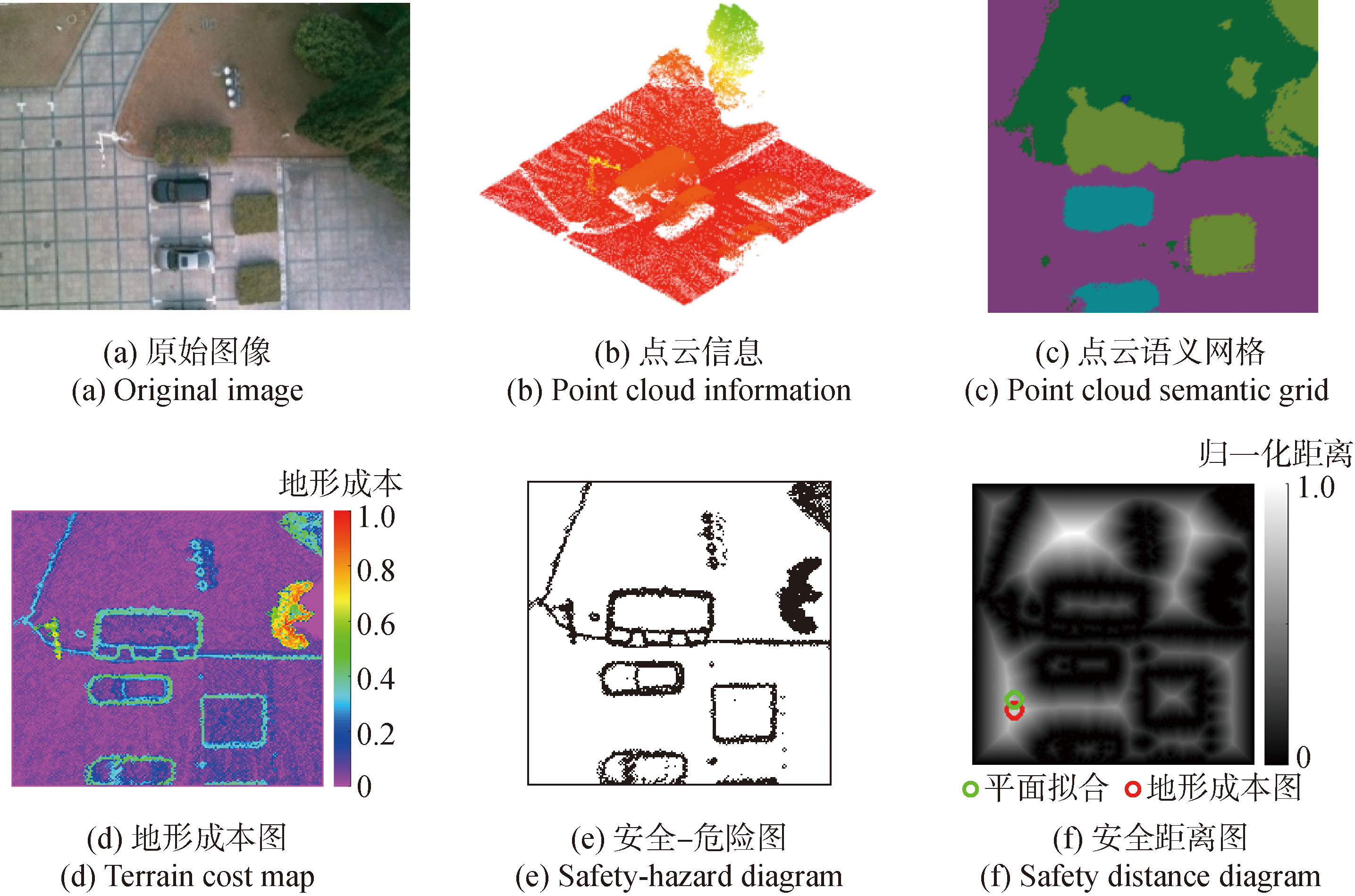
图26 场景3精细落点搜索
Fig.26 Scenario 3 Fine landing point search

图27 场景4精细落点搜索
Fig.27 Scenario 4 Fine landing point search
| 场景 | 方式 | 点云坐 标/m | 时间/ s | 时间 对比/% |
|---|---|---|---|---|
| 场景1 (105 394个点) | 平面拟合 | (4.36,-6.15, -22.26) | 0.491 | 72.30 |
| 地形成本图 | (4.25,-6.55, -22.26) | 0.136 | ||
| 场景2 (84 640个点) | 平面拟合 | (1.26,-3.74, -19.19) | 0.465 | 72.36 |
| 地形成本图 | (1.15,-3.85, -19.21) | 0.129 | ||
| 场景3 (89798个点) | 平面拟合 | (-6.43,-4.94, -20.52) | 0.447 | 73.60 |
| 地形成本图 | (-6.45,-5.65, -20.54) | 0.118 | ||
| 场景4 (84416个点) | 平面拟合 | (4.48,1.96, -19.51) | 0.419 | 75.42 |
| 地形成本图 | (4.25,2.75, -19.52) | 0.103 |
表6 精细落点搜索阶段的真实试验结果对比
Table 6 Comparison of real test results in the fine landing point search phase
| 场景 | 方式 | 点云坐 标/m | 时间/ s | 时间 对比/% |
|---|---|---|---|---|
| 场景1 (105 394个点) | 平面拟合 | (4.36,-6.15, -22.26) | 0.491 | 72.30 |
| 地形成本图 | (4.25,-6.55, -22.26) | 0.136 | ||
| 场景2 (84 640个点) | 平面拟合 | (1.26,-3.74, -19.19) | 0.465 | 72.36 |
| 地形成本图 | (1.15,-3.85, -19.21) | 0.129 | ||
| 场景3 (89798个点) | 平面拟合 | (-6.43,-4.94, -20.52) | 0.447 | 73.60 |
| 地形成本图 | (-6.45,-5.65, -20.54) | 0.118 | ||
| 场景4 (84416个点) | 平面拟合 | (4.48,1.96, -19.51) | 0.419 | 75.42 |
| 地形成本图 | (4.25,2.75, -19.52) | 0.103 |
| [1] |
刘闯, 鱼小军, 张婷, 等. 无人集群装备仿真试验关键技术现状及趋势[J]. 航空学报, 2022, 43(增刊1):726919.
|
|
doi: 10.7527/S1000-6893.2022.26919 |
|
| [2] |
|
| [3] |
孙浩, 尹乔之, 魏小辉, 等. 新型自适应起落架的单支腿落震性能研究[J]. 北京航空航天大学学报, 2023, 49(4):990-998.
|
|
|
|
| [4] |
王盼, 吴昊, 梁宇, 等. 轻型无人机起落架设计与强度分析[J]. 兵工学报, 2022, 43(增刊1):140-145.
|
|
|
|
| [5] |
|
| [6] |
马宁, 曹云峰. 面向无人机自主着陆的视觉感知与位姿估计方法综述[J]. 自动化学报, 2024, 50(7):1284-1304.
|
|
|
|
| [7] |
|
| [8] |
|
| [9] |
袁俊. 基于无人机平台的目标跟踪和着陆位姿估计[D]. 哈尔滨: 哈尔滨工业大学, 2020.
|
|
|
|
| [10] |
黄建宇, 屈玉福, 姜吉祥. 无人飞行器自主降落区识别方法研究[J]. 液晶与显示, 2018, 33(3):238-244.
|
|
|
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
刘飞, 单佳瑶, 熊彬宇, 等. 基于多传感器融合的无人机可降落区域识别方法研究[J]. 航空科学技术, 2022, 33(4):19-27.
|
|
|
|
| [18] |
张炯, 牛欢, 陈雪. 基于多传感器融合的无人机应急着陆功能研究[J]. 航空科学技术, 2022, 33(11):11-20.
|
|
|
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
张泽旭, 王卫东, 崔平远, 等. 一种行星软着陆地形风险评估方法[J]. 哈尔滨工业大学学报, 2011, 43(5):25-29.
|
|
|
|
| [24] |
|
| [25] |
doi: 10.1016/j.isatra.2022.04.005 pmid: 35697539 |
| [26] |
|
| [27] |
|
| [28] |
闫璐. 基于机载激光雷达的旋翼无人机自主择址方法研究[D]. 天津: 天津大学, 2020.
|
|
|
|
| [29] |
|
| [30] |
|
| [1] | 王昱, 李远鹏, 郭中宇, 李硕, 任田君. 基于DDQN-D3PG的无人机空战分层决策[J]. 兵工学报, 2025, 46(8): 240978-. |
| [2] | 张越, 张宁, 徐熙平, 潘越. 基于GOTDBO算法的复杂约束条件下无人机航迹规划[J]. 兵工学报, 2025, 46(8): 240997-. |
| [3] | 李俊辉, 王伟, 王雨辰, 纪毅. 基于预设时间一致性理论的无人机编队控制[J]. 兵工学报, 2025, 46(8): 240863-. |
| [4] | 沈英, 张硕, 王舒, 苏云, 薛芳, 黄峰. 复杂场景伪装小目标机载偏振遥感检测方法[J]. 兵工学报, 2025, 46(7): 240797-. |
| [5] | 肖鹏, 于海霞, 黄龙, 张司明. 基于MDEPSO算法的无人机三维航迹规划[J]. 兵工学报, 2025, 46(7): 240710-. |
| [6] | 徐扬, 魏超, 冯付勇, 胡乐云. 基于时空解耦规划方法的无人机自主降落策略[J]. 兵工学报, 2025, 46(7): 240653-. |
| [7] | 翟伟光, 王峰, 马星宇, 赵薇, 孟鹏帅. YSG-SLAM:动态场景下基于YOLACT的实时语义RGB-D SLAM系统[J]. 兵工学报, 2025, 46(6): 240443-. |
| [8] | 王伟翰, 高铭泽, 施小龙, 胡诗苑, 吴沿江, 陈慧敏. 机载线阵激光雷达动态成像建模与验证[J]. 兵工学报, 2025, 46(6): 240836-. |
| [9] | 闫啸家, 朱惠民, 孙世岩, 石章松, 姜尚. 基于改进变异萤火虫优化粒子滤波的无人机目标定位[J]. 兵工学报, 2025, 46(5): 240549-. |
| [10] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| [11] | 何子琦, 李博宸, 王成罡, 宋磊. 针对区域防御的多无人机序列捕捉算法[J]. 兵工学报, 2025, 46(4): 240343-. |
| [12] | 侯天乐, 毕文豪, 黄湛钧, 李铭浩, 张安. 基于事件触发的多智能体系统预设时间编队控制[J]. 兵工学报, 2025, 46(4): 240292-. |
| [13] | 李雅轩, 刘新福. 基于精确凸松弛的固定翼无人机实时轨迹规划[J]. 兵工学报, 2025, 46(3): 240362-. |
| [14] | 曾照洋, 彭文胜, 李云凯, 徐明. 智能无人机集群可靠性技术内涵、发展及挑战[J]. 兵工学报, 2025, 46(3): 240322-. |
| [15] | 刘聪, 李百庆, 张宗卫, 单泽众. 水平来流作用下无人机旋翼多维气动特征研究[J]. 兵工学报, 2025, 46(3): 240316-. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4