
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (S1): 250667-.doi: 10.12382/bgxb.2025.0667
石忠佼1, 胡海洋1, 何镜2, 林时尧2,*( )
)
收稿日期:2025-07-17
上线日期:2025-11-06
通讯作者:
基金资助:
SHI Zhongjiao1, HU Haiyang1, HE Jing2, LIN Shiyao2,*()
Received:2025-07-17
Online:2025-11-06
摘要:
针对二维场景中空地导弹攻击地面运动目标问题,提出一种考虑落角约束、落速约束及视场角约束的多项式制导律。基于多项式成型理论,将视线角构造成相对距离的多项式函数,利用落角约束等边界条件,得到多项式系数的代数关系式。针对落速约束要求,将未知的多项式系数设计为控制参数,采用迭代学习方法对其进行逐次更新,进而得到标称制导指令。考虑导引头存在的视场角边界限制,基于控制障碍函数方法建立安全集合并构建优化问题,对标称制导指令进行修正以保证视场角始终保持在约束边界内。通过数值仿真验证了所提出的制导律能够在保证命中目标的同时,还能满足落角约束、落速约束及视场角约束。
石忠佼, 胡海洋, 何镜, 林时尧. 基于迭代学习的动目标多约束弹道成型制导方法[J]. 兵工学报, 2025, 46(S1): 250667-.
SHI Zhongjiao, HU Haiyang, HE Jing, LIN Shiyao. An Iterative Learning-based Trajectory Shaping Guidance Method for Missile Attacking Moving Target under Multiple Constraints[J]. Acta Armamentarii, 2025, 46(S1): 250667-.

图1 弹目相对运动模型
Fig.1 Relative motion model of missile and target
图2 弹目连续时间运动
Fig.2 Continuous time motion of missile and target
图3 终端时刻相对位置
Fig.3 Relative position of missile and target at terminal moment
图4 落角、落速和视场角约束实现算法
Fig.4 Implementation algorithm of impact angle,impact speed and field-of-view angle constraints
| 参数 | 数值 |
|---|---|
| 导弹初始位置 | (-15000m,12000m) |
| 导弹初始速度 | 500/600m/s |
| 目标初始位置 | (0m,0m) |
| 导弹初始前置角 | 0deg |
| 期望落角 | -30/-60/-90deg |
| 期望落速 | 300/350/400m/s |
表1 导弹和目标参数
Table 1 Missile and target parameters
| 参数 | 数值 |
|---|---|
| 导弹初始位置 | (-15000m,12000m) |
| 导弹初始速度 | 500/600m/s |
| 目标初始位置 | (0m,0m) |
| 导弹初始前置角 | 0deg |
| 期望落角 | -30/-60/-90deg |
| 期望落速 | 300/350/400m/s |
| 参数 | 数值 |
|---|---|
| m/kg | 532 |
| S/m2 | 0.246 |
| r0/(kg·m-3) | 1.225 |
| ya/m | 10400 |
| k | 0.41 |
| | 0.131 |
| G/(N2m2kg-2) | 6.67e-11 |
| M/kg | 5.972e24 |
| Re/km | 6371 |
表2 固定仿真参数
Table 2 Fixed simulation parameters
| 参数 | 数值 |
|---|---|
| m/kg | 532 |
| S/m2 | 0.246 |
| r0/(kg·m-3) | 1.225 |
| ya/m | 10400 |
| k | 0.41 |
| | 0.131 |
| G/(N2m2kg-2) | 6.67e-11 |
| M/kg | 5.972e24 |
| Re/km | 6371 |

图5 运动目标不同落角约束下的弹道曲线
Fig.5 Trajectories at different impact angles for moving target
图6 运动目标不同落角约束下的相对距离曲线
Fig.6 Relative distance at different impact angles for moving target
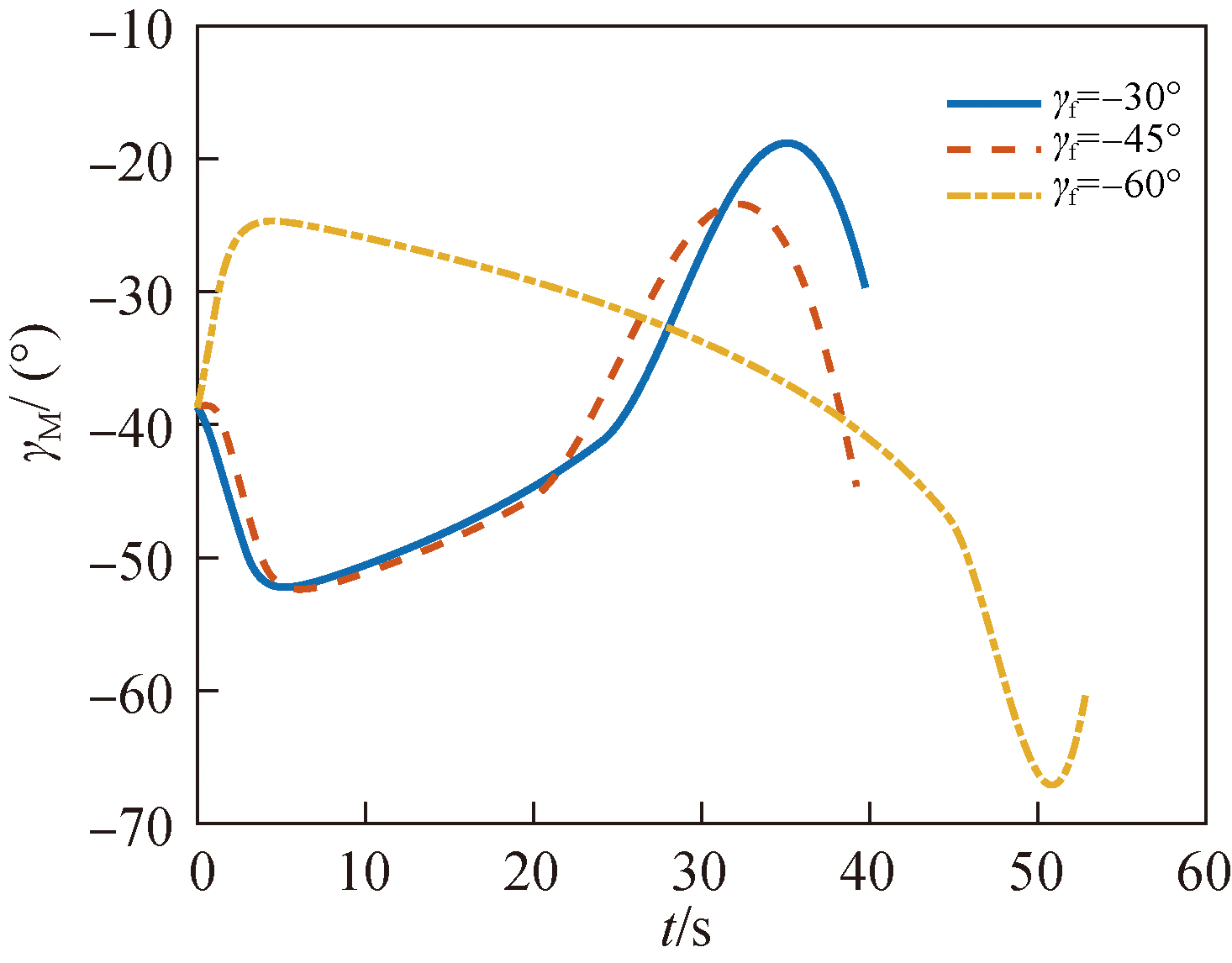
图7 运动目标不同落角约束下的弹道倾角曲线
Fig.7 Trajectory inclination angles at different impact angles for moving target

图8 运动目标不同落角约束下的加速度曲线
Fig.8 Accelerations at different impact angles for moving target
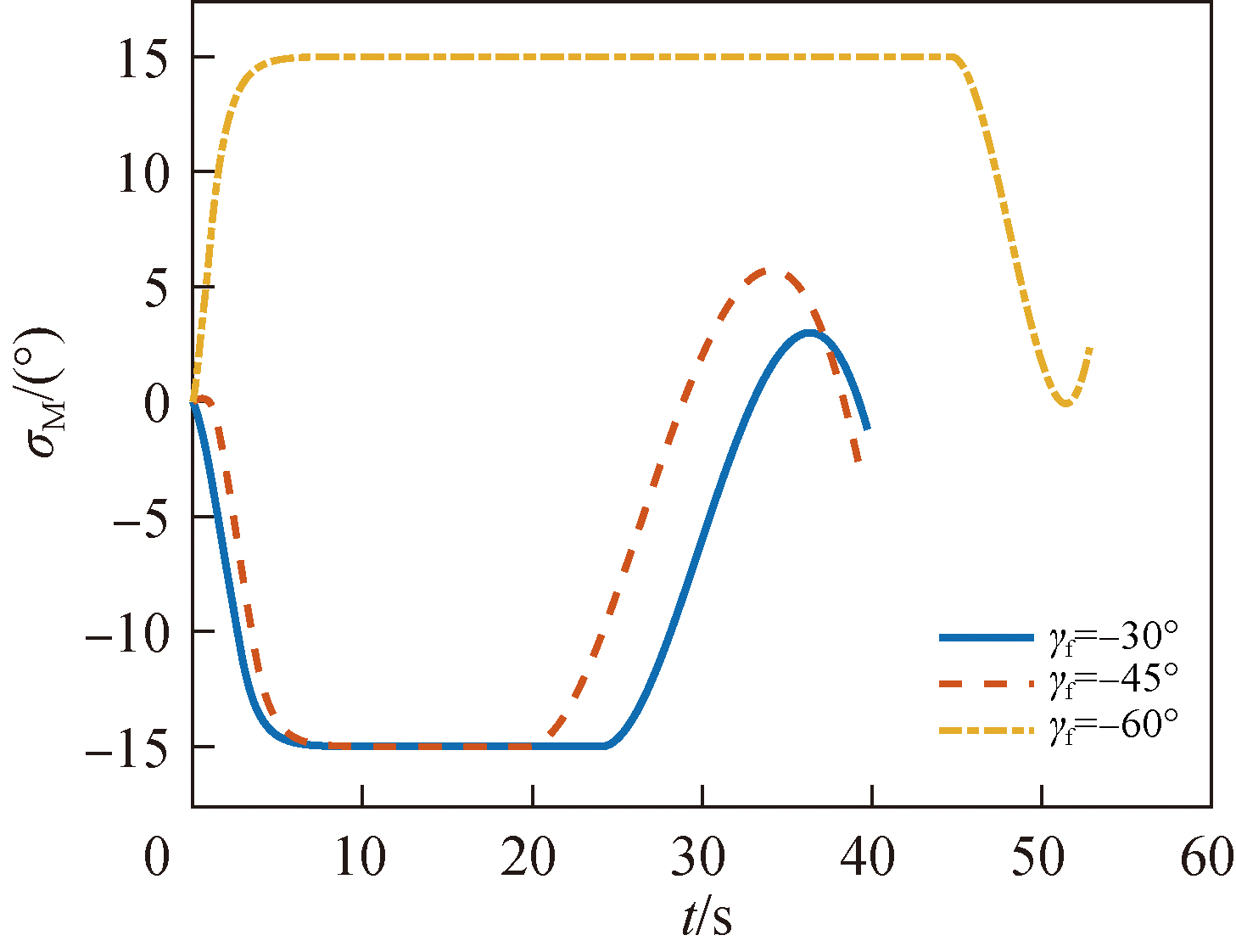
图9 运动目标不同落角约束下的前置角曲线
Fig.9 Leading angles at different impact angles for moving target
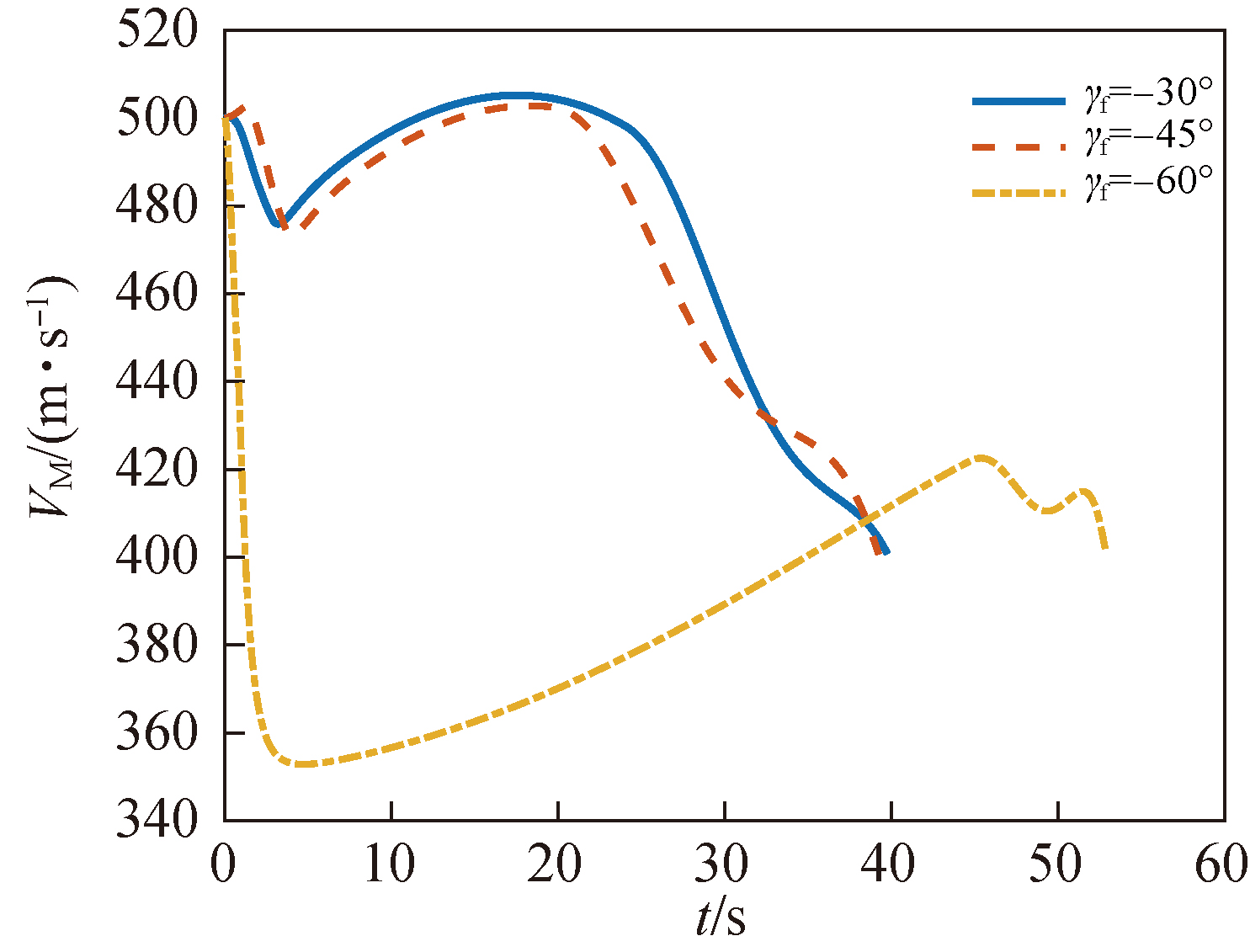
图10 运动目标不同落角约束下的速度曲线
Fig.10 Speeds at different impact angles for moving target
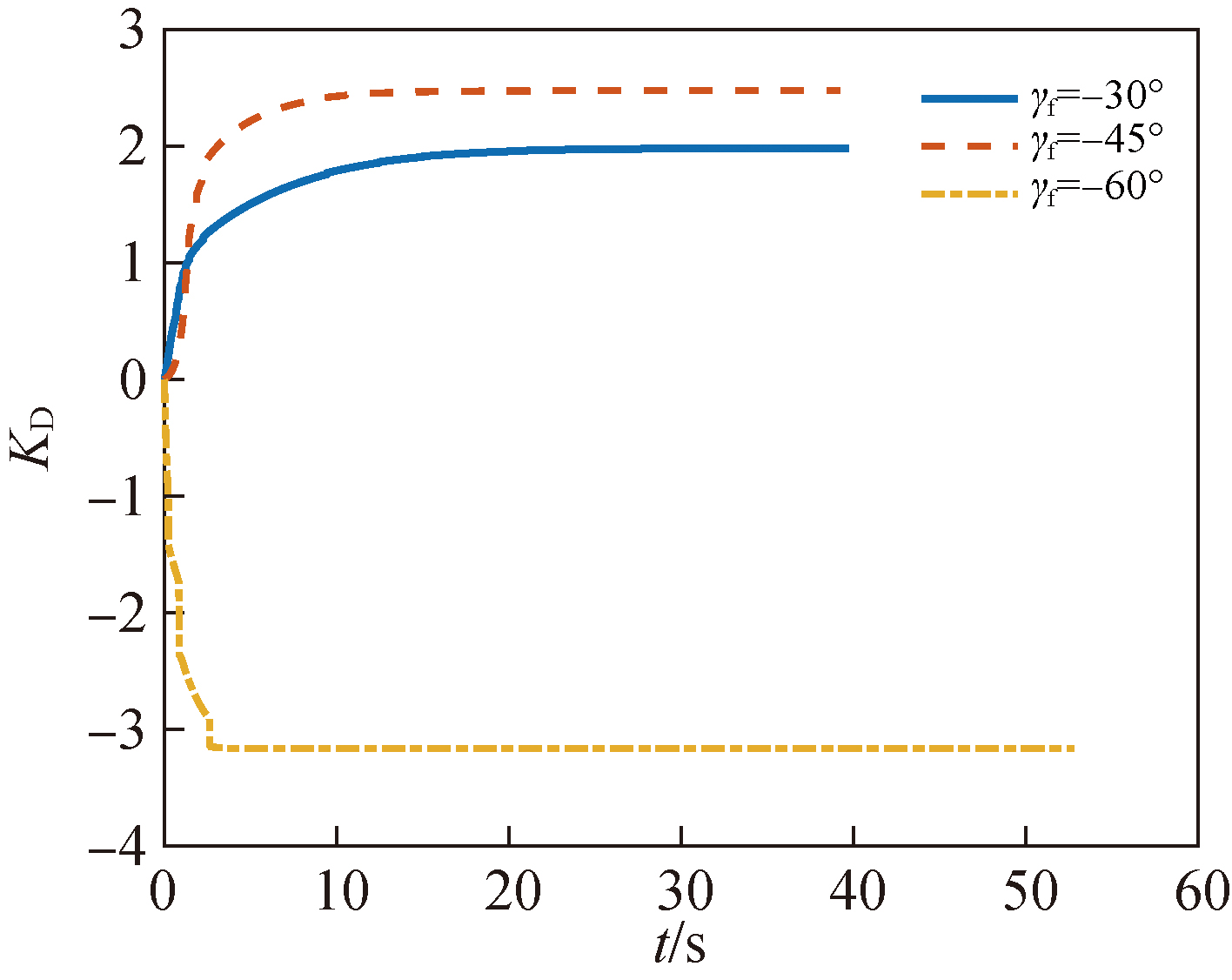
图11 运动目标不同落角约束下的设计参数曲线
Fig.11 Design parameters at different impact angles for moving target
图12 运动目标不同落速约束下的弹道曲线
Fig.12 Trajectories at different impact speeds for moving target
图13 运动目标不同落速约束下的相对距离曲线
Fig.13 Relative distance at different impact speeds for moving target
图14 运动目标不同落速约束下的弹道倾角曲线
Fig.14 Trajectory inclination angles at different impact speeds for moving target
图15 运动目标不同落速约束下的加速度曲线
Fig.15 Accelerations at different impact speeds for moving target
图16 运动目标不同落速约束下的前置角曲线
Fig.16 Leading angles at different impact speed for moving target
图17 运动目标不同落速约束下的速度曲线
Fig.17 Speeds under different impact speed for moving target
图18 运动目标不同落速约束下的设计参数曲线
Fig.18 Design parameters at different impact speed for moving target
图19 静止目标不同落角约束下的弹道曲线
Fig.19 Trajectories at different impact angles for stationary target
图20 静止目标不同落角约束下的相对距离曲线
Fig.20 Relative distances at different impact angle for stationary target
图21 静止目标不同落角约束下的弹道倾角曲线
Fig.21 Trajectory inclination angles at different impact angles for stationary target

图22 静止目标不同落角约束下的加速度曲线
Fig.22 Accelerations at different impact angle for stationary target

图23 静止目标不同落角约束下的前置角曲线
Fig.23 Leading angles at different impact angle for stationary target
图24 静止目标不同落角约束下的速度曲线
Fig.24 Speeds at different impact angle for stationary target
图25 静止目标不同落角约束下的设计参数曲线
Fig.25 Design parameters at different impact angles for stationary target
图26 静止目标不同落速约束下的弹道曲线
Fig.26 Trajectories at different impact speeds for stationary target
图27 静止目标不同落速约束下的相对距离曲线
Fig.27 Relative distances at different impact speed for stationary target
图28 静止目标不同落速约束下的弹道倾角曲线
Fig.28 Trajectory inclination angles under different impact speed for stationary target
图29 静止目标不同落速约束下的加速度曲线
Fig.29 Accelerations at different impact speeds for stationary target
图30 静止目标不同落速约束下的前置角曲线
Fig.30 Leading angles at different impact speed for stationary target
图31 静止目标不同落速约束下的速度曲线
Fig.31 Speeds at different impact speeds for stationary target
图32 静止目标不同落速约束下的设计参数曲线
Fig.32 Design parameters at different impact speed for stationary target
| [1] |
|
| [2] |
|
| [3] |
王思卓, 范世鹏, 林德福, 等. 考虑目标机动和落角约束的二阶滑模制导律[J]. 兵工学报, 2022, 43(12):3048-3061.
|
|
doi: 10.12382/bgxb.2021.0641 |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
陈升富, 常思江, 吴放. 带有视场角约束的滑模攻击时间控制制导律[J]. 兵工学报, 2019, 40(4):777-787.
doi: 10.3969/j.issn.1000-1093.2019.04.013 |
|
doi: 10.3969/j.issn.1000-1093.2019.04.013 |
|
| [13] |
|
| [14] |
|
| [15] |
李文, 尚腾, 姚寅伟, 等. 速度时变情况下多飞行器时间协同制导方法研究[J]. 兵工学报, 2020, 41(6):1096-1110.
doi: 10.3969/j.issn.1000-1093.2020.06.006 |
|
doi: 10.3969/j.issn.1000-1093.2020.06.006 |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
|
| [22] |
|
| [23] |
钱杏芳, 林瑞雄, 赵亚男. 导弹飞行力学[M]. 北京: 北京理工大学出版社, 2006.
|
|
|
|
| [24] |
|
| [1] | 野汶博, 方洋旺, 洪瑞阳, 胡祁东. 基于控制障碍函数的欠驱动无人水下航行器椭圆障碍物避障制导[J]. 兵工学报, 2025, 46(5): 240404-. |
| [2] | 先苏杰, 王康, 曾鑫, 宋杰, 吴志林. 基于深度强化学习的落角和视场角约束制导律[J]. 兵工学报, 2025, 46(4): 240435-. |
| [3] | 吴俊岐, 吴碧, 邓宏彬, 周智千. 基于动态参数扩展控制障碍函数的无人机时变编队最优跟踪控制[J]. 兵工学报, 2025, 46(4): 240260-. |
| [4] | 方秋雨, 张蕴霖, 麻壮壮, 邵晋梁. 未知环境下基于控制障碍函数的无人车轨迹规划[J]. 兵工学报, 2023, 44(S2): 90-102. |
| [5] | 杜宏宝, 王正杰, 唐礼喜, 张小宁. 基于控制障碍函数的飞行器避障与制导控制[J]. 兵工学报, 2023, 44(9): 2814-2823. |
| [6] | 陈升富, 常思江, 吴放. 带有视场角约束的滑模攻击时间控制制导律[J]. 兵工学报, 2019, 40(4): 777-787. |
| [7] | 郭琨, 杨树兴. 考虑导弹1阶驾驶仪的近似最小加速度峰值导引律[J]. 兵工学报, 2018, 39(1): 83-93. |
| [8] | 张春妍, 宋建梅, 侯博, 张民强. 带落角和时间约束的网络化导弹协同制导律[J]. 兵工学报, 2016, 37(3): 431-438. |
| [9] | 陈琦, 王中原, 常思江. 带有落角约束的间接Gauss伪谱最优制导律[J]. 兵工学报, 2015, 36(7): 1203-1212. |
| [10] | 温求遒, 刘大卫, 夏群利, 李然. 扩展的多约束最优制导律及其特性研究[J]. 兵工学报, 2014, 35(5): 662-669. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4