
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (S1): 250399-.doi: 10.12382/bgxb.2025.0399
李科廷1, 赵子杰1,*( ), 应展烽2, 沈诗淇1
), 应展烽2, 沈诗淇1
收稿日期:2025-05-23
上线日期:2025-11-06
通讯作者:
基金资助:
LI Keting1, ZHAO Zijie1,*(), YING Zhanfeng2, SHEN Shiqi1
Received:2025-05-23
Online:2025-11-06
摘要:
针对无人机目标检测面临目标尺度极端变化、小目标高密度遮挡及复杂背景干扰等挑战,提出基于改进YOLOv10的无人机航拍小目标检测的跨层动态检测网络。通过设计双分支跨层特征融合金字塔网络替换原金字塔网络结构,解决传统方法对小目标细节保留不足的问题;设计通道混洗深度上采样模块,将通道混洗操作与深度可分离卷积结合,通过高频残差增强小目标边缘特征;采用端到端动态检测头替代原有的检测头,引入动态加权机制,使得每个位置的特征表示能够根据上下文信息自适应调整。实验结表明:所提检测网络在VisDrone2019验证集上的mAP0.5和mAP0.5:0.95分别达到53.3 %和33.2%,较YOLOv10s分别提升了12.7%和9%,模型参数量减少了23.7%,FPS达到79。所提算法在保证良好的推理速度上显著提高了检测精度,具有较大的实用意义。
李科廷, 赵子杰, 应展烽, 沈诗淇. 面向无人机航拍小目标的跨层动态检测网络[J]. 兵工学报, 2025, 46(S1): 250399-.
LI Keting, ZHAO Zijie, YING Zhanfeng, SHEN Shiqi. Cross-layer Dynamic Detection Network for Small Target Detection in Aerial Photography[J]. Acta Armamentarii, 2025, 46(S1): 250399-.

图1 YOLOv10网络结构
Fig.1 Structure of YOLOv10

图2 改进的跨层动态检测网络结构
Fig.2 Structure of improved cross-layer dynamic detection network
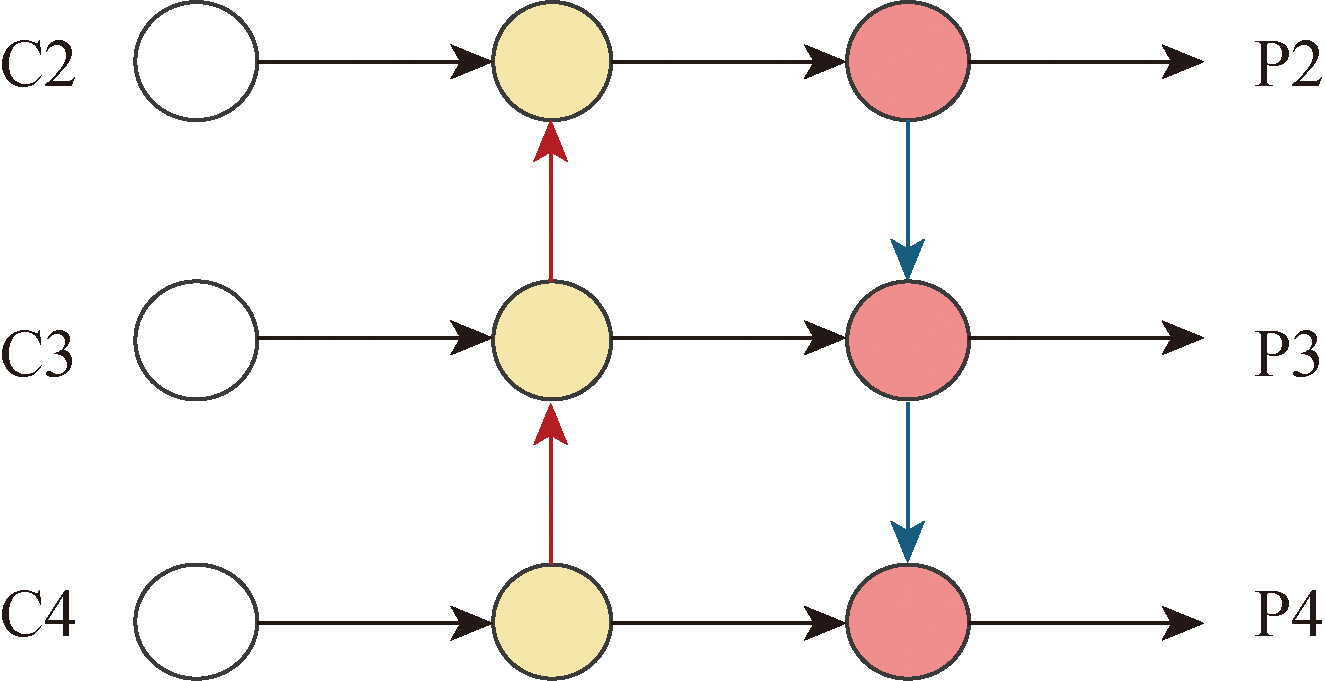
图3 传统FPN网络结构
Fig.3 Structure of traditional FPN network

图4 改进的DCF-FPN网络结构
Fig.4 Structure of improved DCF-FPN network

图5 CSDUS模块结构
Fig.5 Structure of CSDUS module
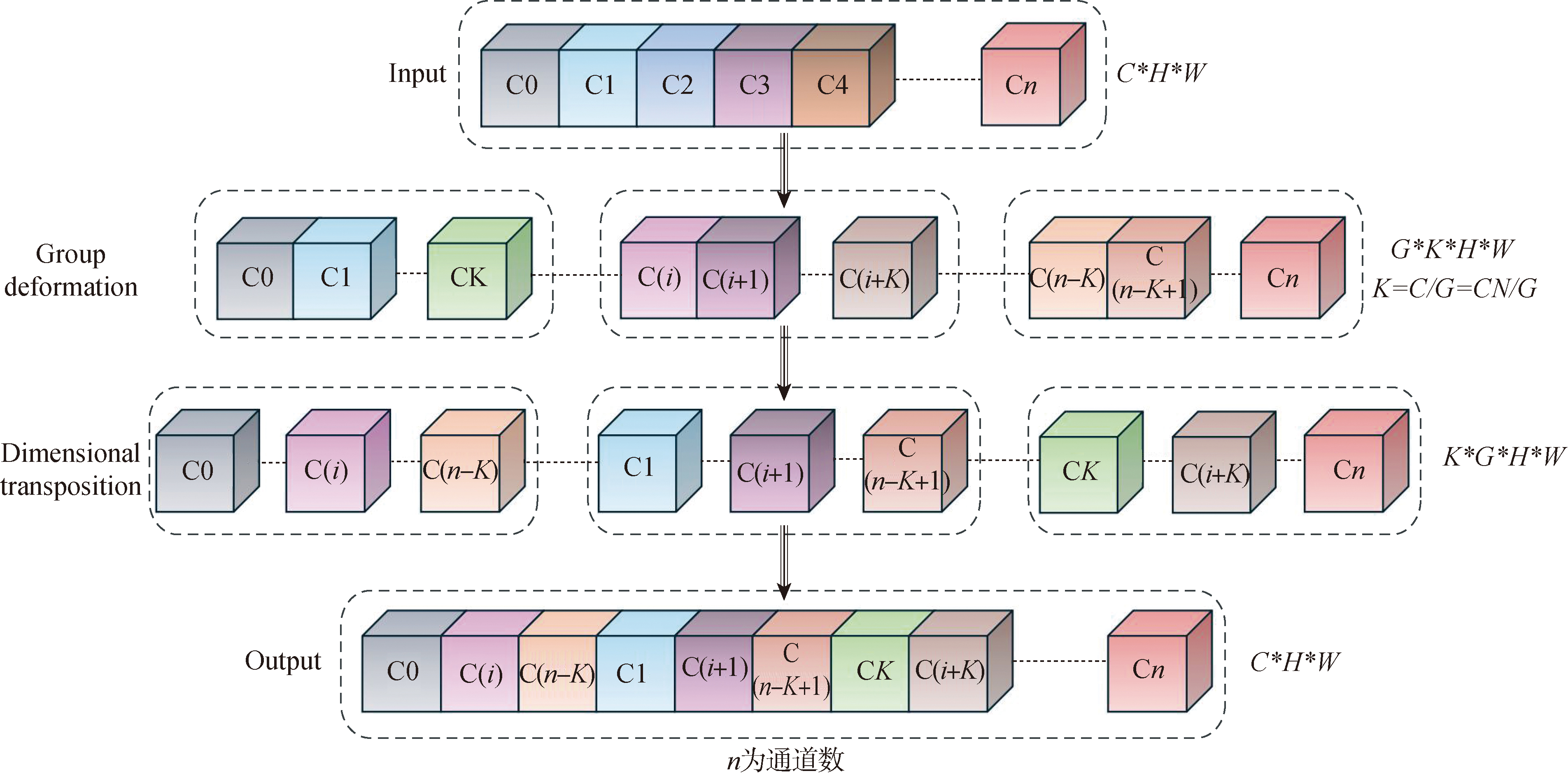
图6 通道混洗过程
Fig.6 Process of channel shuffling
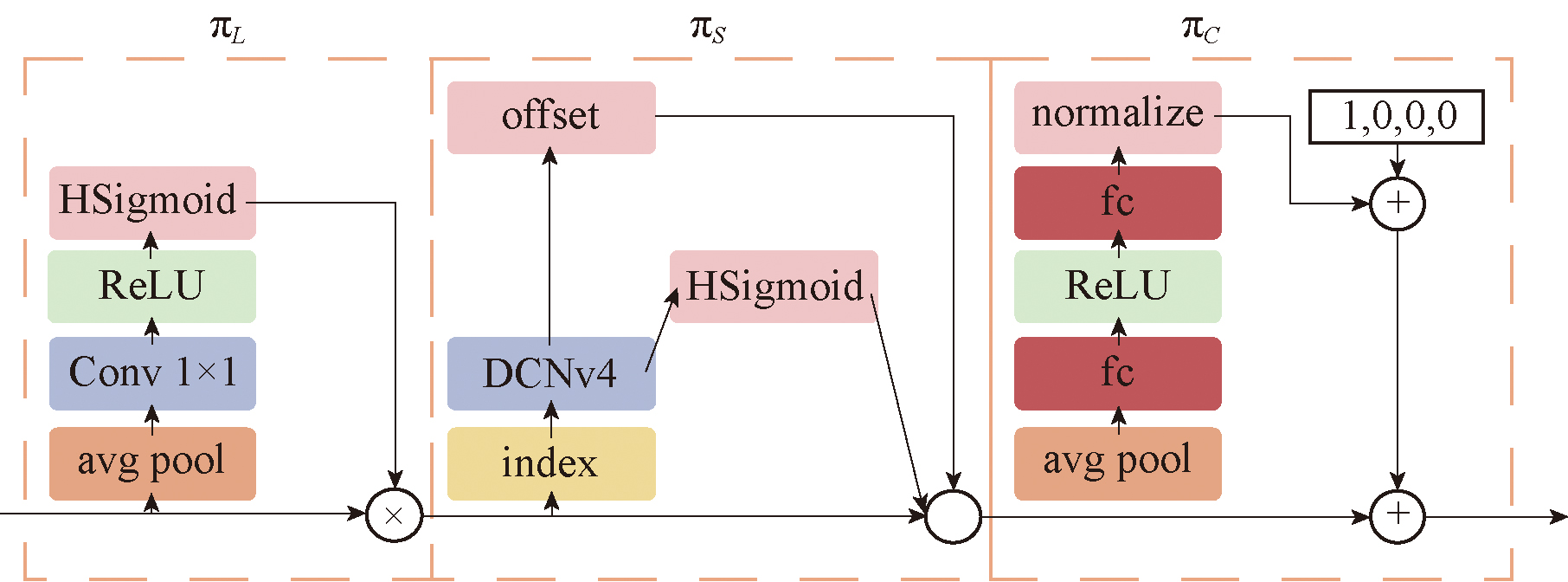
图7 DyHeadBlock内部结构
Fig.7 Internal structure of DyHeadBlock

图8 e2e-DyHead模块结构
Fig.8 Structure of e2e-DyHead module
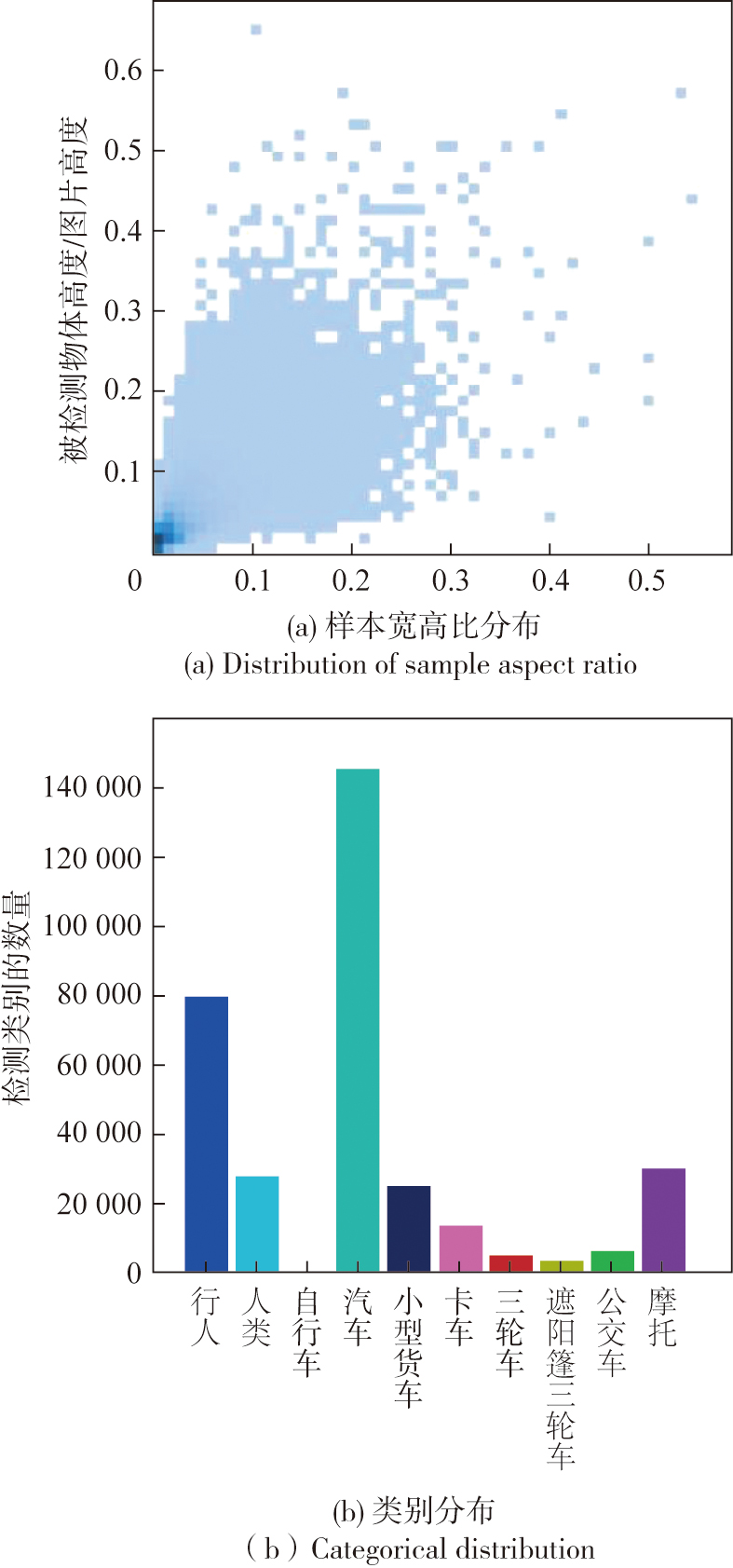
图9 训练集目标样本分布
Fig.9 Distribution of training set target sample
| 参数 | 设置 |
|---|---|
| epochs | 300 |
| batch | 8 |
| workers | 8 |
| imgsz | 640 |
| optimizer | SGD |
| lrf lr0 momentum | 0.01 0.1 0.973 |
表1 训练参数设置
Table 1 Training parameter settings
| 参数 | 设置 |
|---|---|
| epochs | 300 |
| batch | 8 |
| workers | 8 |
| imgsz | 640 |
| optimizer | SGD |
| lrf lr0 momentum | 0.01 0.1 0.973 |
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 29056 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2f | 788480 | 512 | 40×40 |
| SCDown | 137728 | 1024 | 20×20 |
| C2fCIB | 958464 | 1024 | 20×20 |
| SPPF | 656896 | 1024 | 20×20 |
| PSA | 990976 | 1024 | 20×20 |
表2 初始YOLOv10s骨干网络参数
Table 2 Parameters of initial YOLOv10s backbone network
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 29056 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2f | 788480 | 512 | 40×40 |
| SCDown | 137728 | 1024 | 20×20 |
| C2fCIB | 958464 | 1024 | 20×20 |
| SPPF | 656896 | 1024 | 20×20 |
| PSA | 990976 | 1024 | 20×20 |
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| C2f | 7360 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 49664 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2fCIB | 249856 | 512 | 40×40 |
| SPPF | 164608 | 512 | 40×40 |
| PSA | 249728 | 512 | 40×40 |
表3 改进后YOLOv10s骨干网络参数
Table 3 Parameters of improved YOLOv10s backbone network
| 模块 | 参数量 | 通道数 | 输出尺寸 |
|---|---|---|---|
| Conv | 928 | 64 | 320×320 |
| C2f | 7360 | 64 | 320×320 |
| Conv | 18560 | 128 | 160×160 |
| C2f | 49664 | 128 | 160×160 |
| Conv | 73984 | 256 | 80×80 |
| C2f | 197632 | 256 | 80×80 |
| SCDown | 36096 | 512 | 40×40 |
| C2fCIB | 249856 | 512 | 40×40 |
| SPPF | 164608 | 512 | 40×40 |
| PSA | 249728 | 512 | 40×40 |
| 改进主 干网络 | DCF-FPN | CSDUS | e2e-DyHead | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% | 参数量/M | GFLOPs | FPS | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Val | Test | Val | Test | Val | Test | Val | Test | ||||||||||
| 51.7 | 44.5 | 38.8 | 35.0 | 40.6 | 32.8 | 24.2 | 18.6 | 7.22 | 21.4 | 153 | |||||||
| √ | 53.9 | 47.8 | 43.8 | 38.0 | 45.2 | 36.9 | 27.4 | 21.0 | 2.21 | 25.7 | 154 | ||||||
| √ | 51.6 | 45.4 | 40.0 | 35.6 | 41.3 | 33.8 | 24.7 | 19.2 | 6.98 | 21.7 | 118 | ||||||
| √ | 51.2 | 45.0 | 40.1 | 35.0 | 41.1 | 33.4 | 24.6 | 18.9 | 7.56 | 23.2 | 149 | ||||||
| √ | 53.0 | 46.4 | 39.6 | 35.0 | 41.5 | 33.3 | 24.9 | 19.3 | 8.25 | 26.2 | 81 | ||||||
| √ | √ | 57.7 | 49.5 | 47.1 | 40.8 | 49.2 | 39.4 | 30.4 | 22.6 | 4.59 | 49.9 | 123 | |||||
| √ | √ | √ | 56.9 | 50.1 | 47.7 | 40.9 | 49.8 | 40.2 | 31.0 | 23.4 | 4.18 | 51.9 | 134 | ||||
| √ | √ | √ | √ | 61.5 | 53.4 | 50.2 | 42.1 | 53.3 | 42.1 | 33.2 | 24.7 | 5.51 | 72.6 | 79 | |||
表4 消融实验
Table 4 Ablation experiments
| 改进主 干网络 | DCF-FPN | CSDUS | e2e-DyHead | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% | 参数量/M | GFLOPs | FPS | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Val | Test | Val | Test | Val | Test | Val | Test | ||||||||||
| 51.7 | 44.5 | 38.8 | 35.0 | 40.6 | 32.8 | 24.2 | 18.6 | 7.22 | 21.4 | 153 | |||||||
| √ | 53.9 | 47.8 | 43.8 | 38.0 | 45.2 | 36.9 | 27.4 | 21.0 | 2.21 | 25.7 | 154 | ||||||
| √ | 51.6 | 45.4 | 40.0 | 35.6 | 41.3 | 33.8 | 24.7 | 19.2 | 6.98 | 21.7 | 118 | ||||||
| √ | 51.2 | 45.0 | 40.1 | 35.0 | 41.1 | 33.4 | 24.6 | 18.9 | 7.56 | 23.2 | 149 | ||||||
| √ | 53.0 | 46.4 | 39.6 | 35.0 | 41.5 | 33.3 | 24.9 | 19.3 | 8.25 | 26.2 | 81 | ||||||
| √ | √ | 57.7 | 49.5 | 47.1 | 40.8 | 49.2 | 39.4 | 30.4 | 22.6 | 4.59 | 49.9 | 123 | |||||
| √ | √ | √ | 56.9 | 50.1 | 47.7 | 40.9 | 49.8 | 40.2 | 31.0 | 23.4 | 4.18 | 51.9 | 134 | ||||
| √ | √ | √ | √ | 61.5 | 53.4 | 50.2 | 42.1 | 53.3 | 42.1 | 33.2 | 24.7 | 5.51 | 72.6 | 79 | |||
| G | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|---|---|
| 2 | 61.1 | 50.2 | 52.8 | 32.9 |
| 4 | 61.5 | 49.1 | 52.8 | 32.8 |
| 8 | 60.8 | 50.2 | 52.8 | 33.0 |
| 16 | 61.9 | 49.1 | 52.6 | 32.9 |
| 32 | 60.3 | 49.6 | 52.5 | 32.7 |
| 64 | 60.7 | 50.1 | 52.9 | 33.1 |
| 128 | 61.5 | 50.2 | 53.3 | 33.2 |
表5 CSDUS模块消融实验
Table 5 Ablation experiment of CSDUS module
| G | 精确率/% | 召回率/% | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|---|---|
| 2 | 61.1 | 50.2 | 52.8 | 32.9 |
| 4 | 61.5 | 49.1 | 52.8 | 32.8 |
| 8 | 60.8 | 50.2 | 52.8 | 33.0 |
| 16 | 61.9 | 49.1 | 52.6 | 32.9 |
| 32 | 60.3 | 49.6 | 52.5 | 32.7 |
| 64 | 60.7 | 50.1 | 52.9 | 33.1 |
| 128 | 61.5 | 50.2 | 53.3 | 33.2 |
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% | Para/M | GFLOPs |
|---|---|---|---|---|
| YOLOv5s | 39.8 | 23.9 | 9.12 | 23.8 |
| YOLOv8s | 40.2 | 24.1 | 11.13 | 28.5 |
| YOLOv10n | 34.8 | 20.1 | 2.27 | 6.5 |
| YOLOv10s | 40.6 | 24.2 | 7.22 | 21.4 |
| YOLOv10m | 43.8 | 26.7 | 15.32 | 58.9 |
| YOLOv10l | 46.8 | 28.7 | 24.32 | 120.0 |
| CMS-YOLOv7[ | 52.3 | 30.7 | 17.99 | 166 |
| HSP-YOLOv8[ | 49.6 | 32.9 | 11.5 | 50.0 |
| BDH-YOLO[ | 42.9 | 26.2 | 9.39 | - |
| ARB-YOLOv8[ | 48.6 | 30.1 | 13.4 | 43.4 |
| Ours | 53.3 | 33.2 | 5.51 | 72.6 |
表6 基于VisDrone2019数据集的各模型对比实验
Table 6 Comparison experiments of models based on VisDrone2019 data set
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% | Para/M | GFLOPs |
|---|---|---|---|---|
| YOLOv5s | 39.8 | 23.9 | 9.12 | 23.8 |
| YOLOv8s | 40.2 | 24.1 | 11.13 | 28.5 |
| YOLOv10n | 34.8 | 20.1 | 2.27 | 6.5 |
| YOLOv10s | 40.6 | 24.2 | 7.22 | 21.4 |
| YOLOv10m | 43.8 | 26.7 | 15.32 | 58.9 |
| YOLOv10l | 46.8 | 28.7 | 24.32 | 120.0 |
| CMS-YOLOv7[ | 52.3 | 30.7 | 17.99 | 166 |
| HSP-YOLOv8[ | 49.6 | 32.9 | 11.5 | 50.0 |
| BDH-YOLO[ | 42.9 | 26.2 | 9.39 | - |
| ARB-YOLOv8[ | 48.6 | 30.1 | 13.4 | 43.4 |
| Ours | 53.3 | 33.2 | 5.51 | 72.6 |
| 模型 | 行人/% | 人类/% | 自行车/% | 汽车/% | 小型货车/ % | 卡车/% | 三轮车/% | 遮阳篷三 轮车/% | 公交车/% | 摩托/% |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOv5s | 43.1 | 34.0 | 12.8 | 79.9 | 45.2 | 38.5 | 27.7 | 15.5 | 56.0 | 45.5 |
| YOLOv8s | 44.3 | 34.1 | 13.8 | 80.1 | 45.7 | 36.7 | 28.1 | 17.2 | 57.0 | 44.9 |
| YOLOv10n | 37.6 | 30.0 | 11.1 | 76.7 | 38.4 | 29.4 | 22.6 | 13.0 | 49.4 | 40.1 |
| YOLOv10s | 43.8 | 34.6 | 14.9 | 80.4 | 45.7 | 37.0 | 29.2 | 16.5 | 57.6 | 46.3 |
| YOLOv10m | 47.8 | 37.9 | 19.0 | 82.1 | 48.6 | 40.0 | 34.1 | 17.3 | 61.1 | 50.2 |
| YOLOv10l | 50.4 | 39.5 | 20.5 | 83.3 | 51.2 | 47.1 | 36.6 | 18.9 | 67.2 | 53.3 |
| HSP-YOLOv8[ | 57.4 | 49.0 | 24.9 | 84.2 | 54.2 | 46.5 | 37.6 | 22.6 | 64.3 | 55.3 |
| ARB-YOLOv8[ | 56.8 | 46.7 | 21.2 | 86.2 | 53.4 | 42.6 | 35.2 | 20.7 | 66.3 | 56.9 |
| Ours | 60.8 | 49.2 | 28.3 | 87.7 | 56.1 | 48.9 | 42.0 | 26.2 | 71.5 | 62.0 |
表7 基于VisDrone2019数据集的各类别对比实验
Table 7 Comparison experiments of various categories based on VisDrone2019 data set
| 模型 | 行人/% | 人类/% | 自行车/% | 汽车/% | 小型货车/ % | 卡车/% | 三轮车/% | 遮阳篷三 轮车/% | 公交车/% | 摩托/% |
|---|---|---|---|---|---|---|---|---|---|---|
| YOLOv5s | 43.1 | 34.0 | 12.8 | 79.9 | 45.2 | 38.5 | 27.7 | 15.5 | 56.0 | 45.5 |
| YOLOv8s | 44.3 | 34.1 | 13.8 | 80.1 | 45.7 | 36.7 | 28.1 | 17.2 | 57.0 | 44.9 |
| YOLOv10n | 37.6 | 30.0 | 11.1 | 76.7 | 38.4 | 29.4 | 22.6 | 13.0 | 49.4 | 40.1 |
| YOLOv10s | 43.8 | 34.6 | 14.9 | 80.4 | 45.7 | 37.0 | 29.2 | 16.5 | 57.6 | 46.3 |
| YOLOv10m | 47.8 | 37.9 | 19.0 | 82.1 | 48.6 | 40.0 | 34.1 | 17.3 | 61.1 | 50.2 |
| YOLOv10l | 50.4 | 39.5 | 20.5 | 83.3 | 51.2 | 47.1 | 36.6 | 18.9 | 67.2 | 53.3 |
| HSP-YOLOv8[ | 57.4 | 49.0 | 24.9 | 84.2 | 54.2 | 46.5 | 37.6 | 22.6 | 64.3 | 55.3 |
| ARB-YOLOv8[ | 56.8 | 46.7 | 21.2 | 86.2 | 53.4 | 42.6 | 35.2 | 20.7 | 66.3 | 56.9 |
| Ours | 60.8 | 49.2 | 28.3 | 87.7 | 56.1 | 48.9 | 42.0 | 26.2 | 71.5 | 62.0 |
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|
| YOLOv5n | 62.3 | 35.8 |
| YOLOv5s | 68.6 | 45.3 |
| YOLOv8n | 65.7 | 42.4 |
| YOLOv8s | 70.3 | 48.3 |
| YOLOv10s | 71.6 | 49.1 |
| Ours | 78.2 | 54.1 |
表8 基于DOTA数据集的各模型对比实验
Table 8 Comparison experiment of each model based on DOTA data set
| 模型 | mAP@0.5/% | mAP@0.5:0.95/% |
|---|---|---|
| YOLOv5n | 62.3 | 35.8 |
| YOLOv5s | 68.6 | 45.3 |
| YOLOv8n | 65.7 | 42.4 |
| YOLOv8s | 70.3 | 48.3 |
| YOLOv10s | 71.6 | 49.1 |
| Ours | 78.2 | 54.1 |

图10 检测效果可视化对比
Fig.10 Comparison of target detection results
| [1] |
|
| [2] |
吴一全, 童康. 基于深度学习的无人机航拍图像小目标检测研究进展[J]. 航空学报, 2025, 46(3):181-207
|
|
|
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
冯迎宾, 郭枭尊, 晏佳华. 基于多尺度注意力机制的无人机小目标检测算法[J]. 兵工学报, 2025, 46(1):14-23.
|
|
|
|
| [12] |
赵海丽, 许修常, 潘宇航. 基于改进YOLOv7-tiny的车辆目标检测算法[J]. 兵工学报, 2025, 46(4):103-113.
|
|
|
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
于傲泽, 魏维伟, 王平, 等. 基于分块复合注意力的无人机小目标检测算法[J]. 航空学报, 2024, 45(14):1-11.
|
|
|
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|
| [21] |
刘延芳, 佘佳宇, 袁秋帆, 等. 无人机遥感图像实时小目标检测方法[J]. 航空学报, 2024, 45(14):59-78.
|
|
|
|
| [22] |
|
| [23] |
|
| [24] |
|
| [25] |
|
| [1] | 陈发玮, 陈松, 王盛, 刘成城, 岳嘉颖. 基于混合粒子群算法的无人机协同干扰任务分配方法[J]. 兵工学报, 2025, 46(S1): 250142-. |
| [2] | 赵子杰, 沈诗淇, 应展烽, 李科廷, 李瑞星, 唐世玮. 复杂场景下多光谱特征融合的航拍车辆检测[J]. 兵工学报, 2025, 46(S1): 250413-. |
| [3] | 杨志来, 李克娜, 陈昭文, 刘瑞. 面向遇险人员的搜寻定位无人机系统设计[J]. 兵工学报, 2025, 46(S1): 250454-. |
| [4] | 张沛, 张安, 毕文豪, 毛泽铭. 无人机末端机动规避中远距空空导弹策略[J]. 兵工学报, 2025, 46(9): 240972-. |
| [5] | 王昱, 李远鹏, 郭中宇, 李硕, 任田君. 基于DDQN-D3PG的无人机空战分层决策[J]. 兵工学报, 2025, 46(8): 240978-. |
| [6] | 张越, 张宁, 徐熙平, 潘越. 基于GOTDBO算法的复杂约束条件下无人机航迹规划[J]. 兵工学报, 2025, 46(8): 240997-. |
| [7] | 李俊辉, 王伟, 王雨辰, 纪毅. 基于预设时间一致性理论的无人机编队控制[J]. 兵工学报, 2025, 46(8): 240863-. |
| [8] | 周乐, 尹乔之, 钟沛霖, 魏小辉, 聂宏. 基于数据融合的无人机自主择址技术[J]. 兵工学报, 2025, 46(8): 240751-. |
| [9] | 沈英, 张硕, 王舒, 苏云, 薛芳, 黄峰. 复杂场景伪装小目标机载偏振遥感检测方法[J]. 兵工学报, 2025, 46(7): 240797-. |
| [10] | 肖鹏, 于海霞, 黄龙, 张司明. 基于MDEPSO算法的无人机三维航迹规划[J]. 兵工学报, 2025, 46(7): 240710-. |
| [11] | 徐扬, 魏超, 冯付勇, 胡乐云. 基于时空解耦规划方法的无人机自主降落策略[J]. 兵工学报, 2025, 46(7): 240653-. |
| [12] | 王伟翰, 高铭泽, 施小龙, 胡诗苑, 吴沿江, 陈慧敏. 机载线阵激光雷达动态成像建模与验证[J]. 兵工学报, 2025, 46(6): 240836-. |
| [13] | 闫啸家, 朱惠民, 孙世岩, 石章松, 姜尚. 基于改进变异萤火虫优化粒子滤波的无人机目标定位[J]. 兵工学报, 2025, 46(5): 240549-. |
| [14] | 孙殿星, 窦钥聪, 彭锐晖, 董云龙, 郭玮. 基于雷达-红外成像特征级融合的角反射器智能识别算法[J]. 兵工学报, 2025, 46(5): 240501-. |
| [15] | 周桢林, 龙腾, 刘大卫, 孙景亮, 钟建鑫, 李俊志. 基于强化学习冲突消解的大规模无人机集群航迹规划方法[J]. 兵工学报, 2025, 46(5): 241146-. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4