
主管单位:中国科学技术协会
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
主办单位:中国兵工学会
ISSN 1000-1093 CN 11-2176/TJ
兵工学报 ›› 2025, Vol. 46 ›› Issue (S1): 250395-.doi: 10.12382/bgxb.2025.0395
王尚炎, 崔涛*( ), 王天翔, 王兵兵, 张付军
), 王天翔, 王兵兵, 张付军
收稿日期:2025-05-22
上线日期:2025-11-06
通讯作者:
WANG Shangyan, CUI Tao*(), WANG Tianxiang, WANG Bingbing, ZHANG Fujun
Received:2025-05-22
Online:2025-11-06
摘要:
针对并联式弱混履带车辆起步、加速过程存在的油电竞争及柴油机动力不足问题,通过理论分析与实车试验明确了问题原因。依据试验结果提出利用需求油量与限制油量描述驾驶员动力需求及柴油机响应动力需求的能力,并由此确定动态过程所需电机输出的驱动转矩,建立基于柴油机油量需求差的电机转矩算法,突出了并联式弱混履带车辆中柴油机的主动力源特征,提出并联式弱混履带车辆动态过程油电竞争协调控制方法。在建立对象车辆动力系统仿真模型后,对所提方法进行验证,仿真结果表明:所提方法在提升车辆动态过程动力性能的同时有效避免了油电竞争问题,与现有协调控制方法相比柴油机动力输出提升19.37%,电池电能消耗减少63.75%,车辆加速时间缩短6.52%。
王尚炎, 崔涛, 王天翔, 王兵兵, 张付军. 并联式弱混履带车辆动态过程“油电竞争”协调控制方法[J]. 兵工学报, 2025, 46(S1): 250395-.
WANG Shangyan, CUI Tao, WANG Tianxiang, WANG Bingbing, ZHANG Fujun. Dynamic Coordinated Diesel-electric Competition Control Method for Parallel Mild Hybrid Tracked Vehicle[J]. Acta Armamentarii, 2025, 46(S1): 250395-.
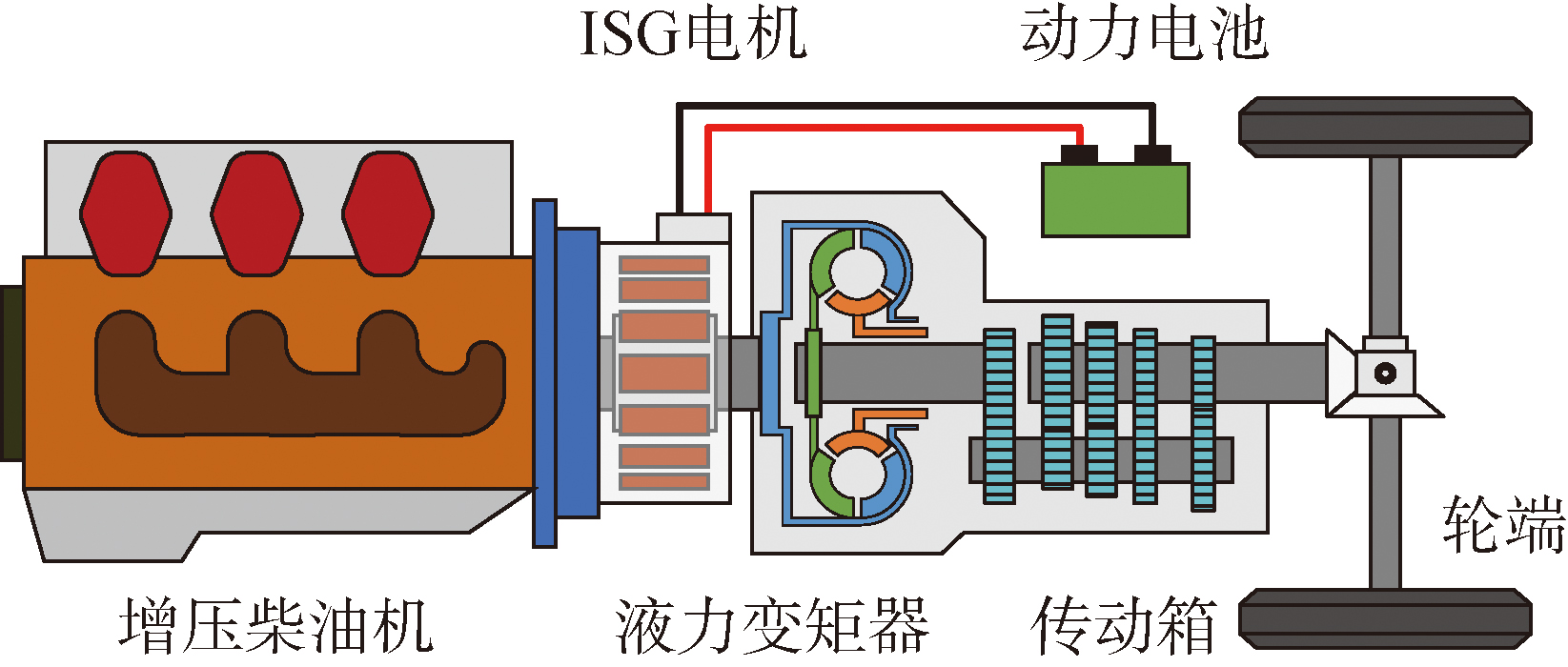
图1 并联式弱混履带车辆动力系统结构
Fig.1 Schematic diagram of parallel mild hybrid powertrain for tracked vehicle
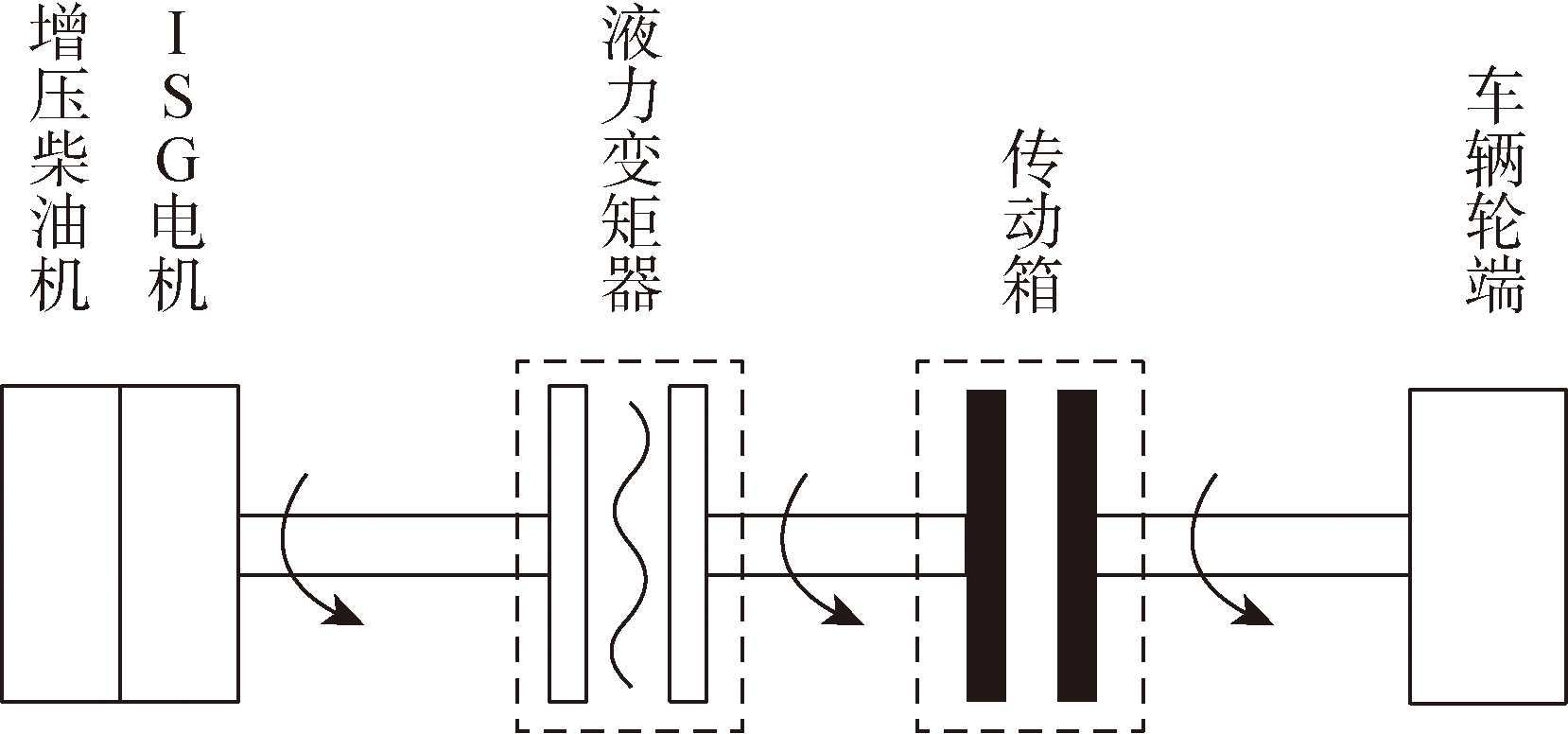
图2 并联式弱混履带车辆动力系统简化结构
Fig.2 Simplified structural diagram of parallel mild hybrid powertrain for tracked vehicle
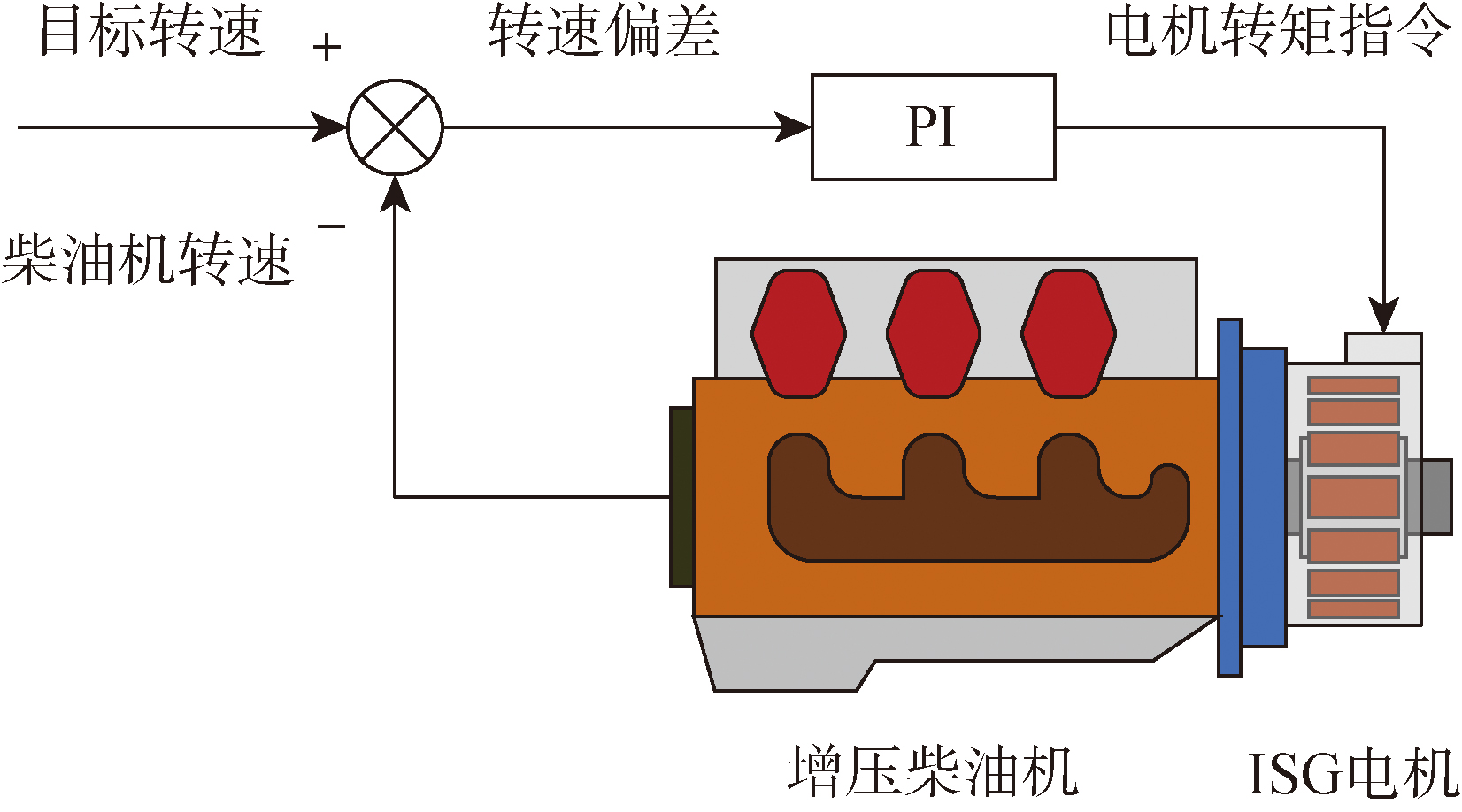
图3 转速差电机转矩算法
Fig.3 Schematic diagram of speed differential-based motor torque algorithm
| 主要参数 | 数值 |
|---|---|
| 整车质量/t | 23 |
| 柴油机额定功率/kW | 480 |
| 柴油机额定转速/(r·min-1) | 2500 |
| ISG电机额定功率/kW | 100 |
| 动力电池容量/(kW·h) | 8 |
| 液力变矩器循环圆直径/mm | 375 |
| 传动箱挡位数 | 6 |
表1 并联式弱混履带车辆主要参数
Table 1 Key parameters of parallel mild hybrid tracked vehicle
| 主要参数 | 数值 |
|---|---|
| 整车质量/t | 23 |
| 柴油机额定功率/kW | 480 |
| 柴油机额定转速/(r·min-1) | 2500 |
| ISG电机额定功率/kW | 100 |
| 动力电池容量/(kW·h) | 8 |
| 液力变矩器循环圆直径/mm | 375 |
| 传动箱挡位数 | 6 |
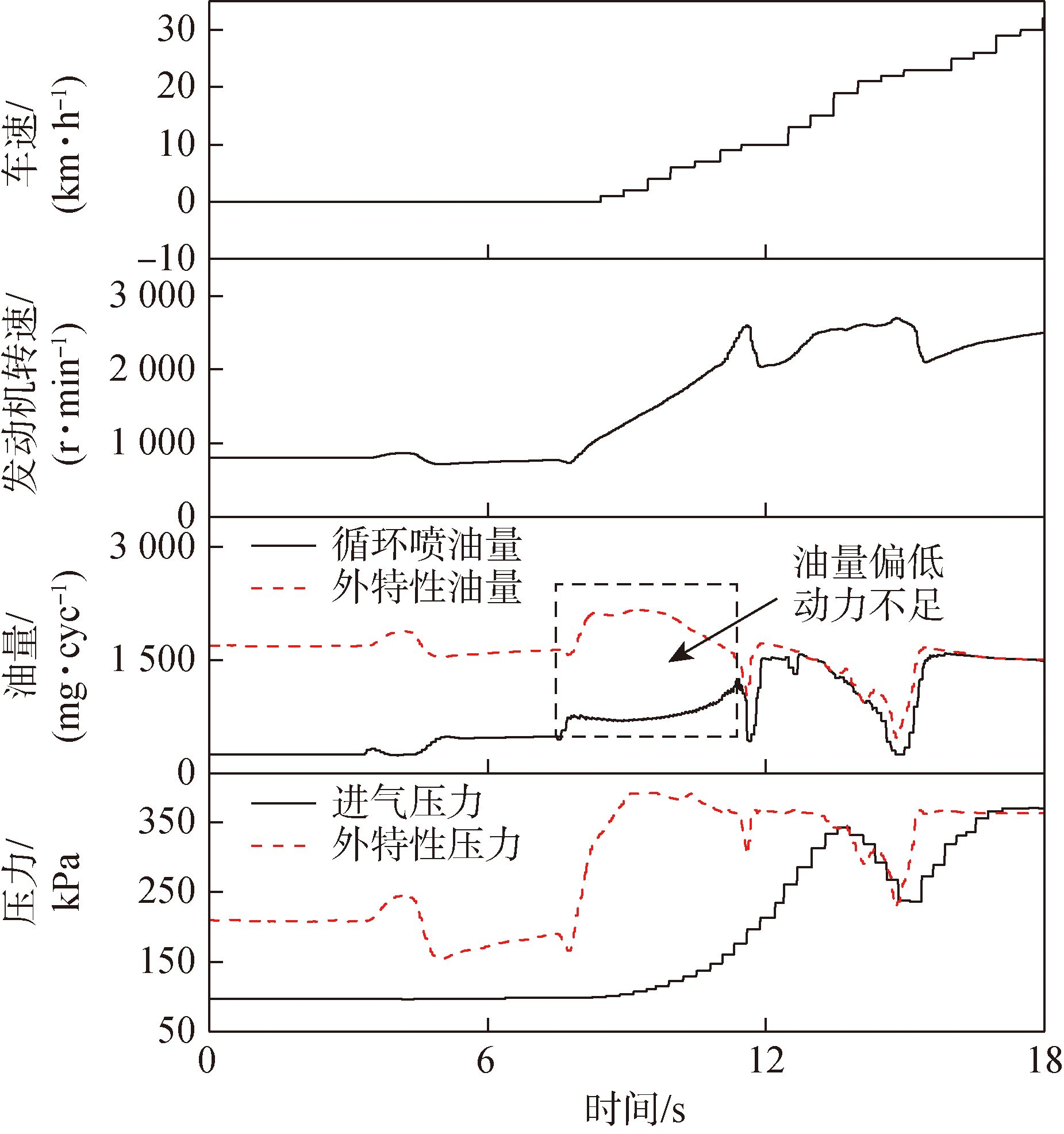
图4 车辆起步、加速过程试验结果
Fig.4 Experimental results of vehicle launch and acceleration process
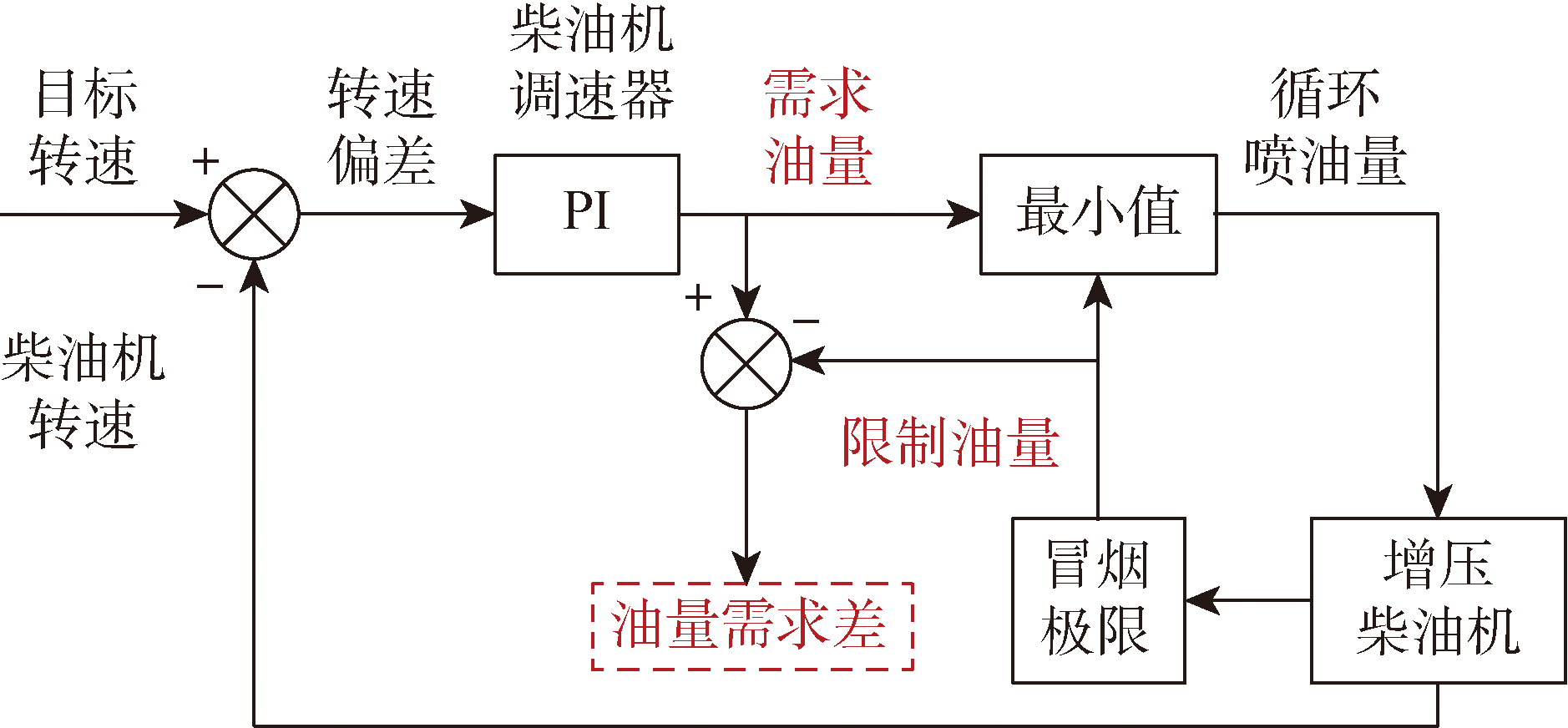
图5 柴油机转速-油量调节功能及相关参数
Fig.5 Speed-fuel regulation mechanism and corresponding parameters of diesel engine
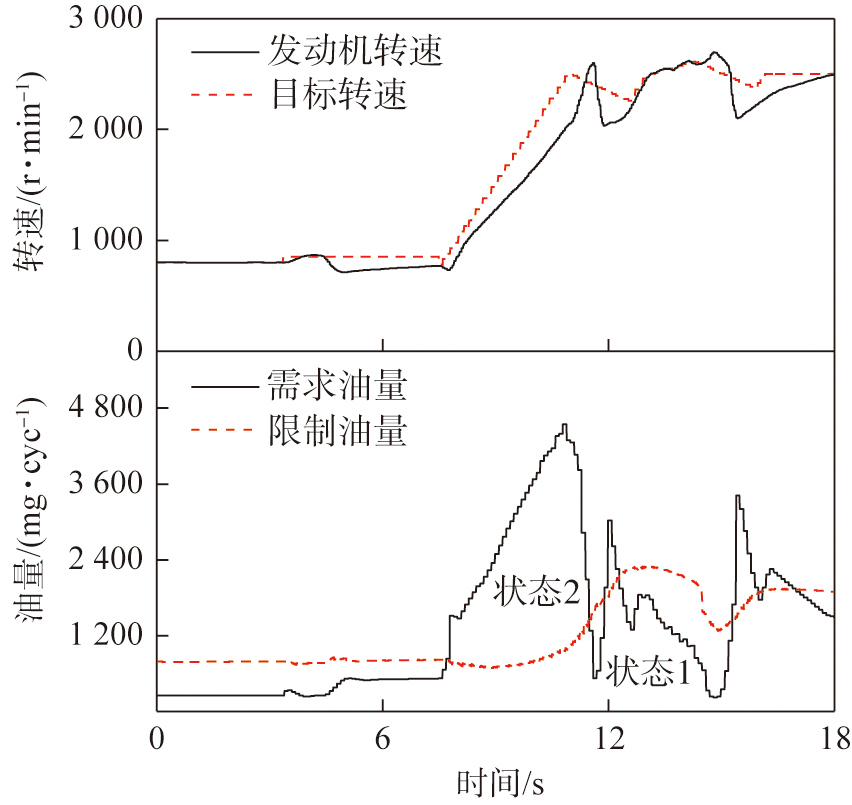
图6 车辆起步、加速过程转速与油量参数试验结果
Fig.6 Experimental results of speed and fuel parameters in vehicle launch and acceleration process
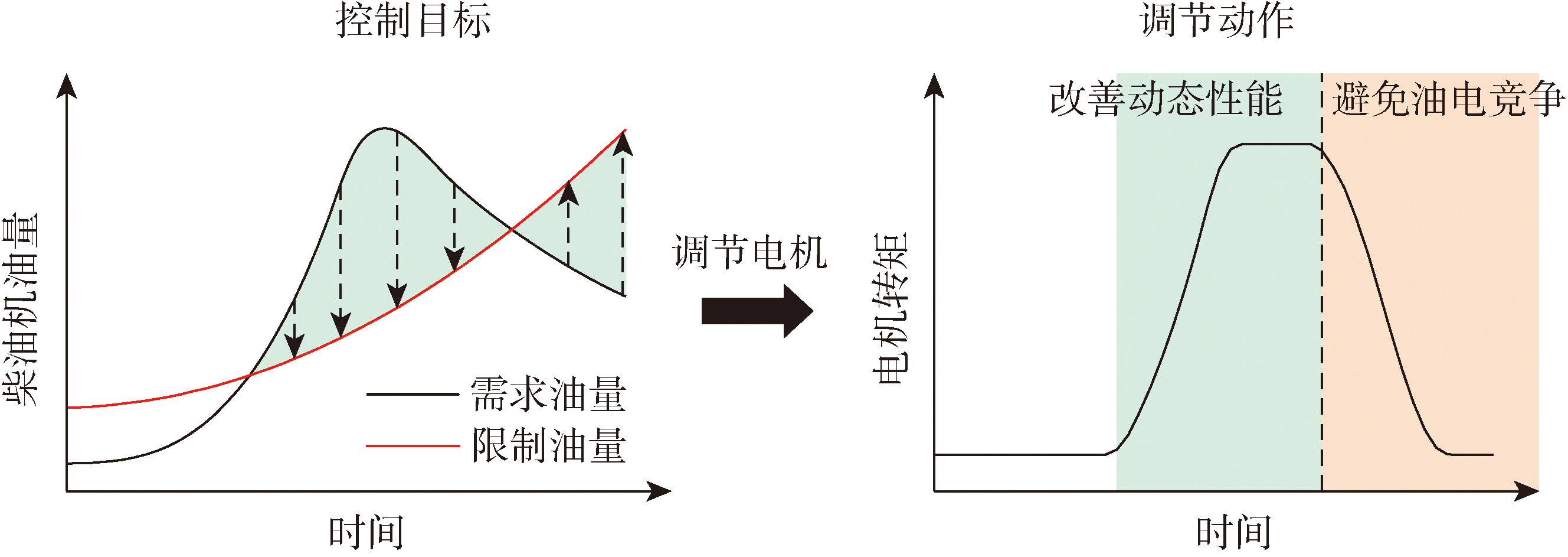
图7 并联式弱混履带车辆动态协调控制方法设计
Fig.7 Design of dynamic coordinated control method for parallel mild hybrid tracked vehicle
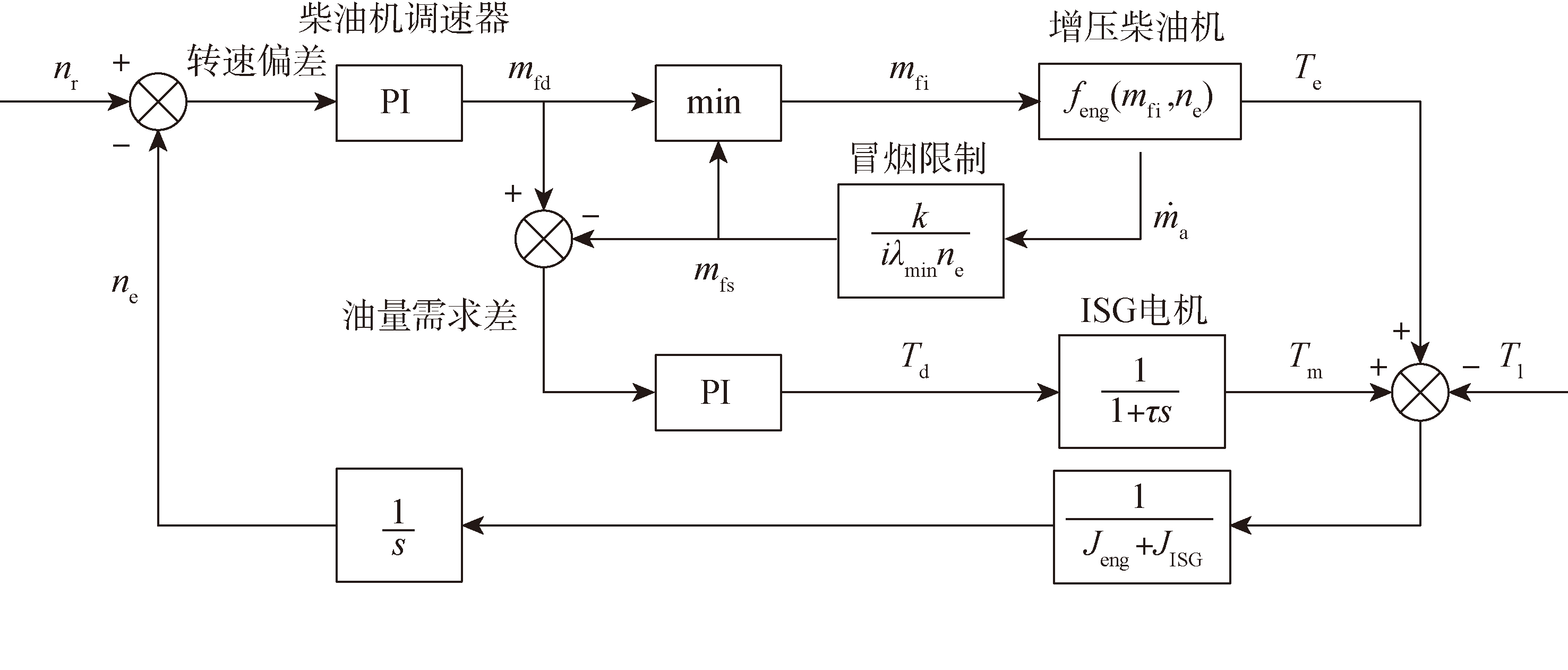
图8 基于“油量需求差”的电机转矩算法框图
Fig.8 Block diagram of fuel demand differential-based motor torque algorithm
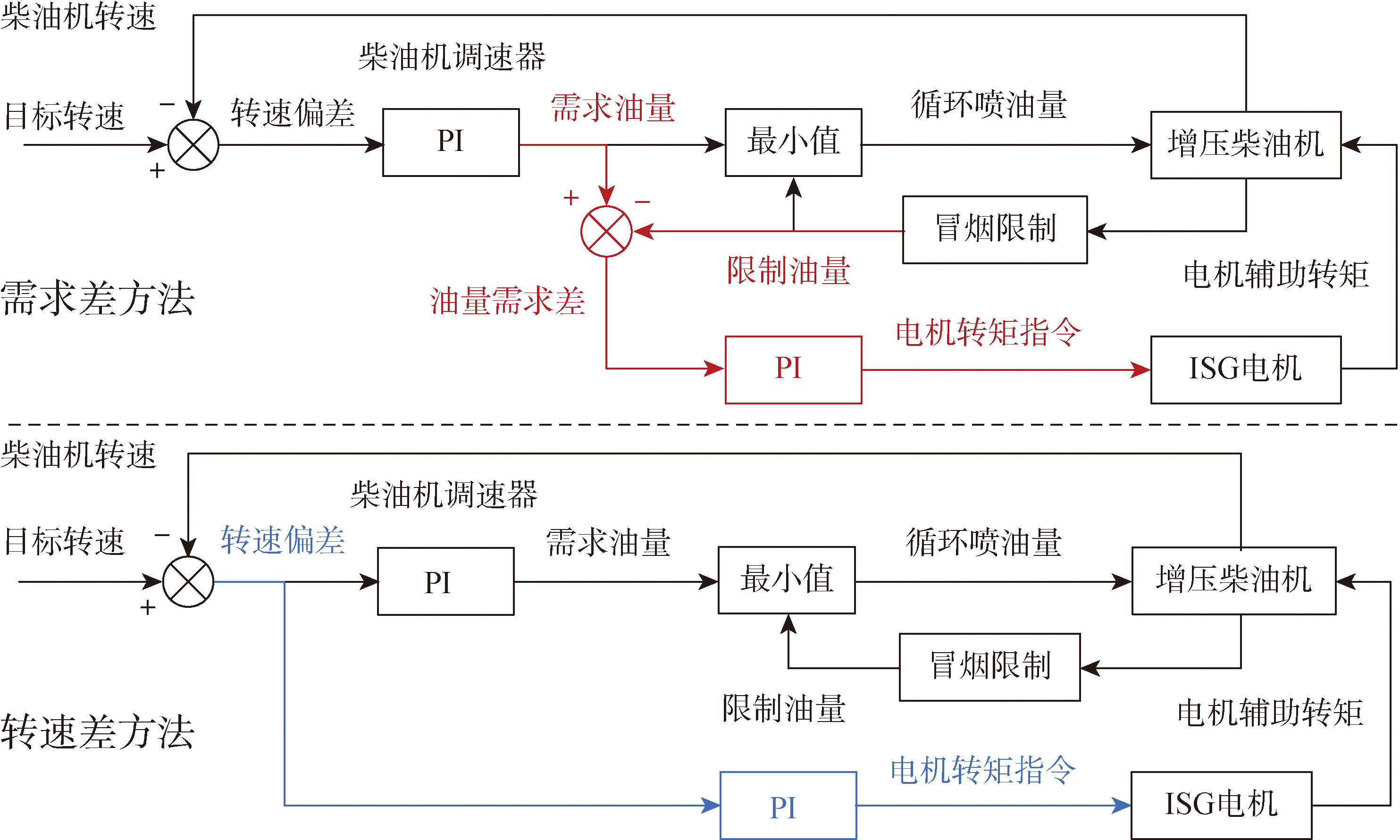
图9 需求差方法与转速差方法对比
Fig.9 Comparison between fuel demand differential-based motor torque algorithm and speed differential-based motor torque algorithm
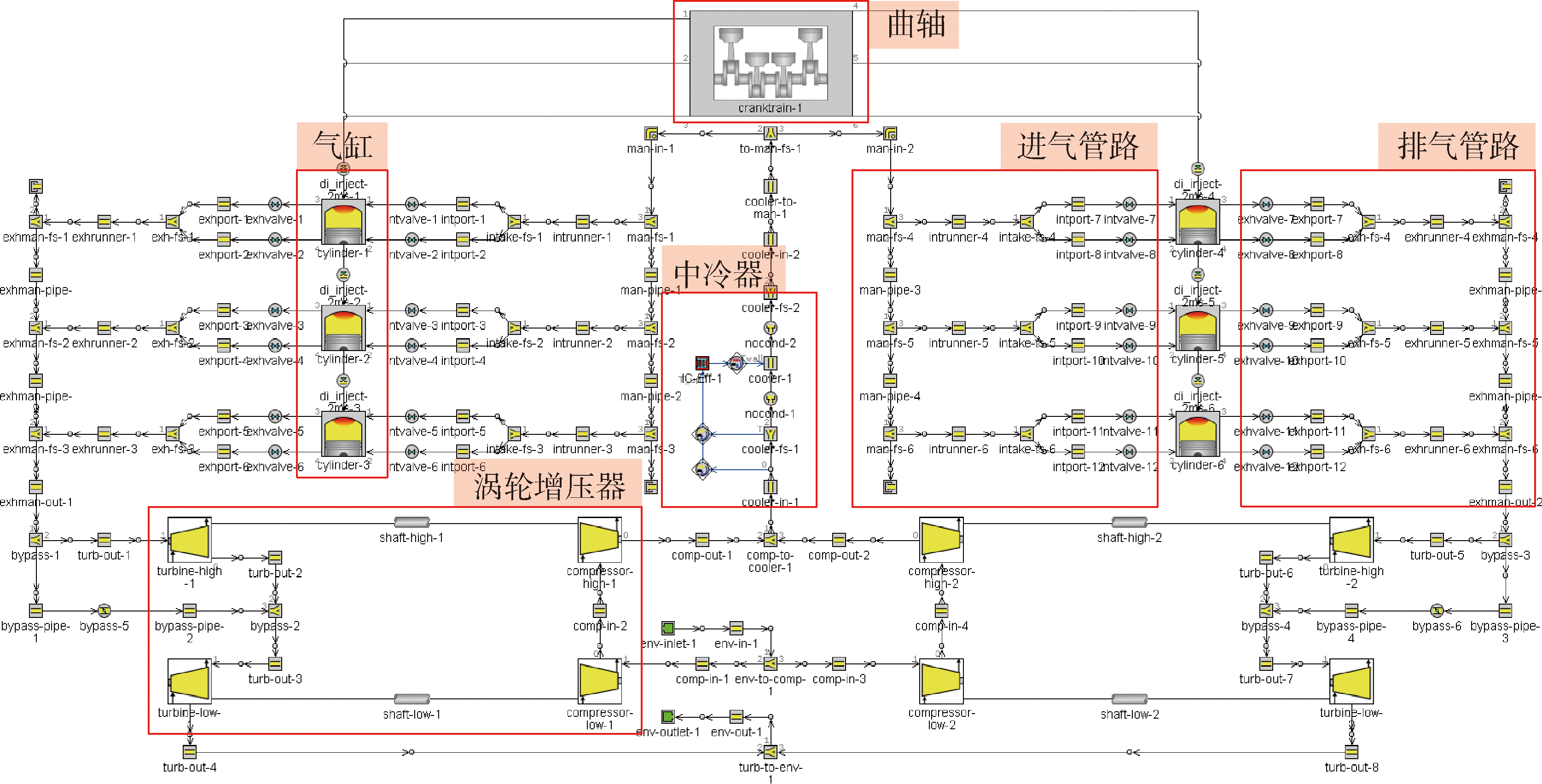
图10 增压柴油机GT-Suite模型
Fig.10 GT-Suite model of turbocharged diesel engine
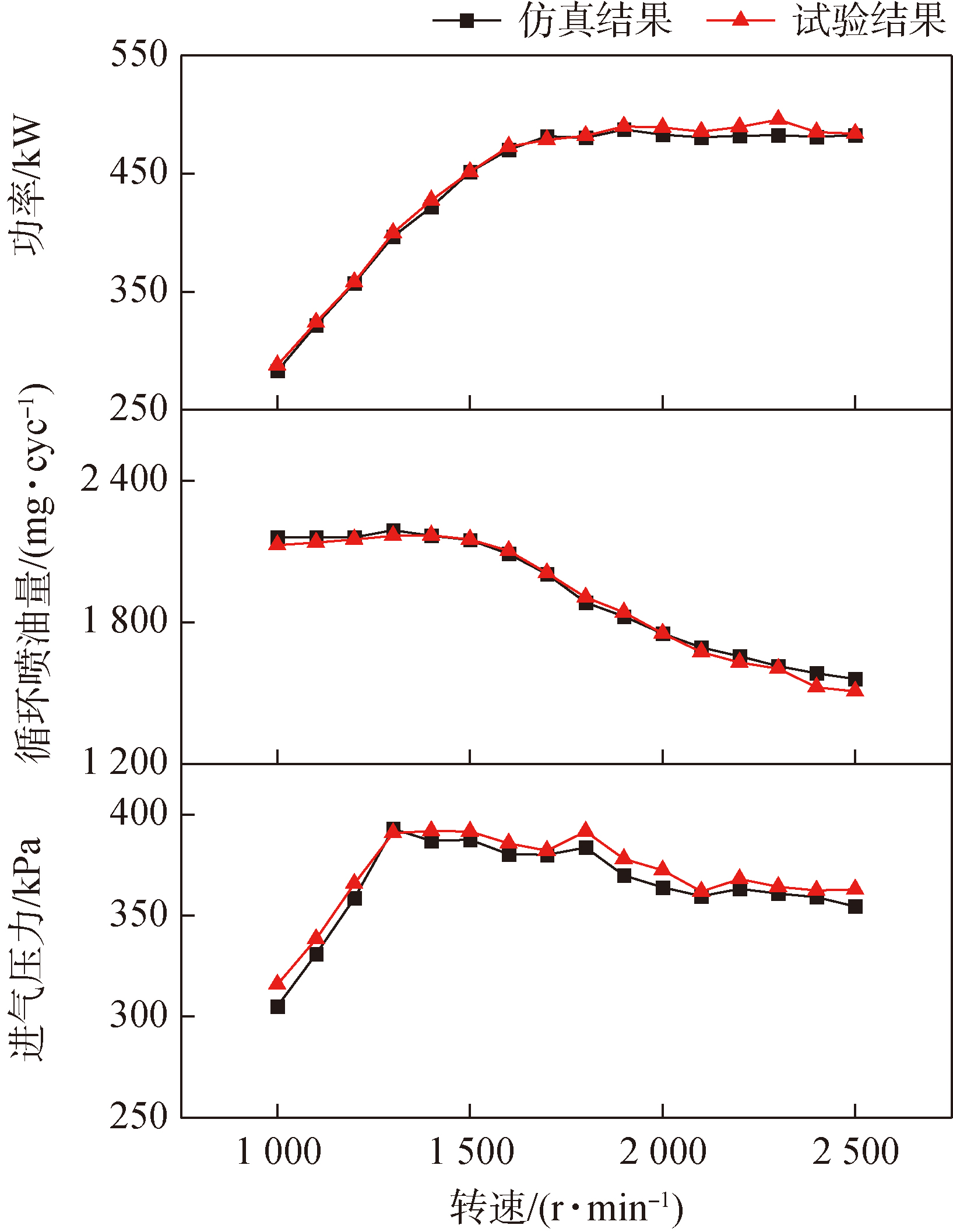
图11 柴油机外特性性能仿真与试验结果对比
Fig.11 Comparison of simulated and experimental results of diesel engine’s external characteristics
| 外特性参数 | RMSE/% |
|---|---|
| 功率 | 1.11 |
| 循环喷油量 | 1.37 |
| 进气压力 | 1.68 |
表2 外特性主要参数RMSE百分数统计
Table 2 RMSE% statistics for key parameters of engine external characteristics
| 外特性参数 | RMSE/% |
|---|---|
| 功率 | 1.11 |
| 循环喷油量 | 1.37 |
| 进气压力 | 1.68 |
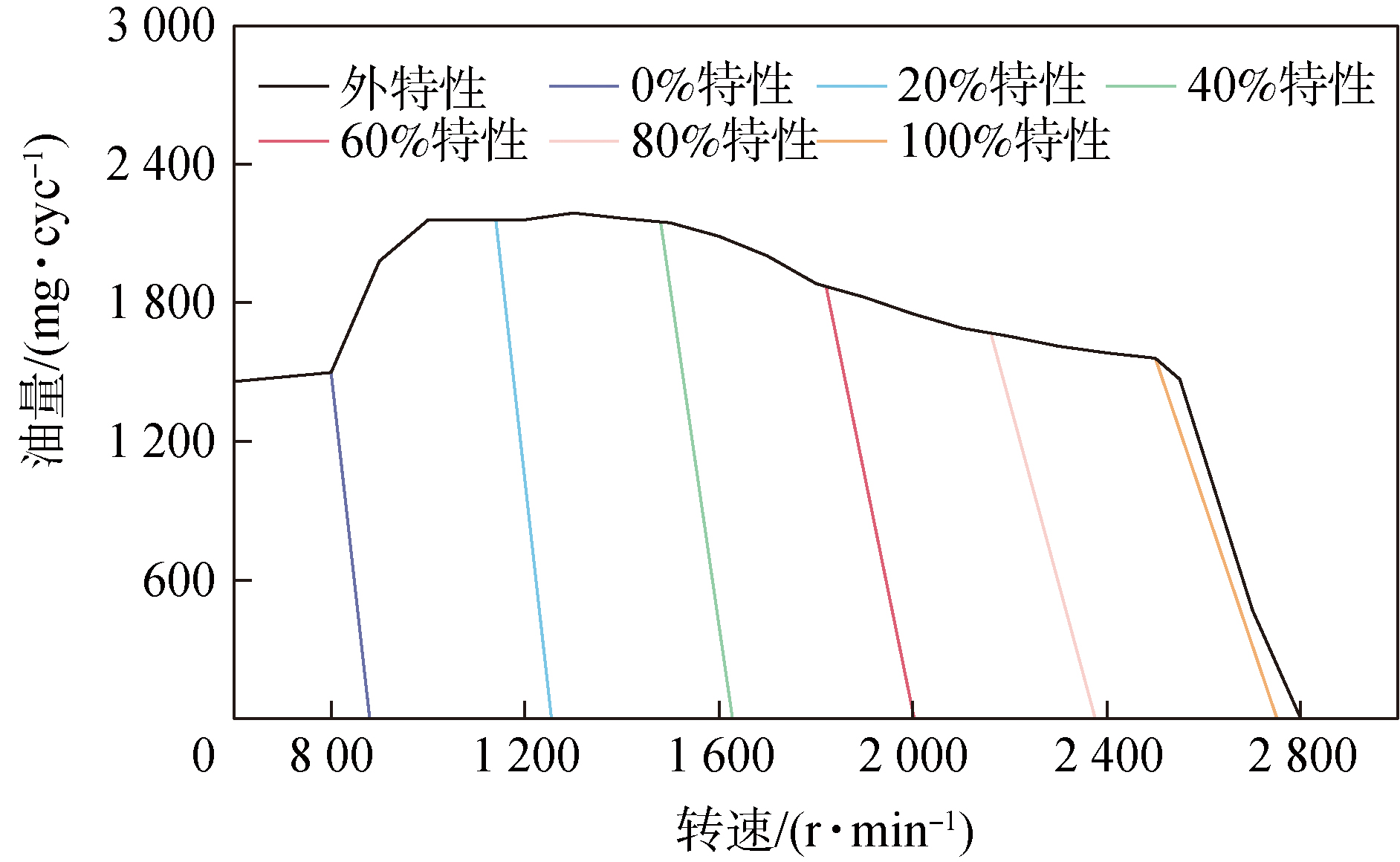
图12 全程调速特性
Fig.12 Full-range speed regulation characteristic
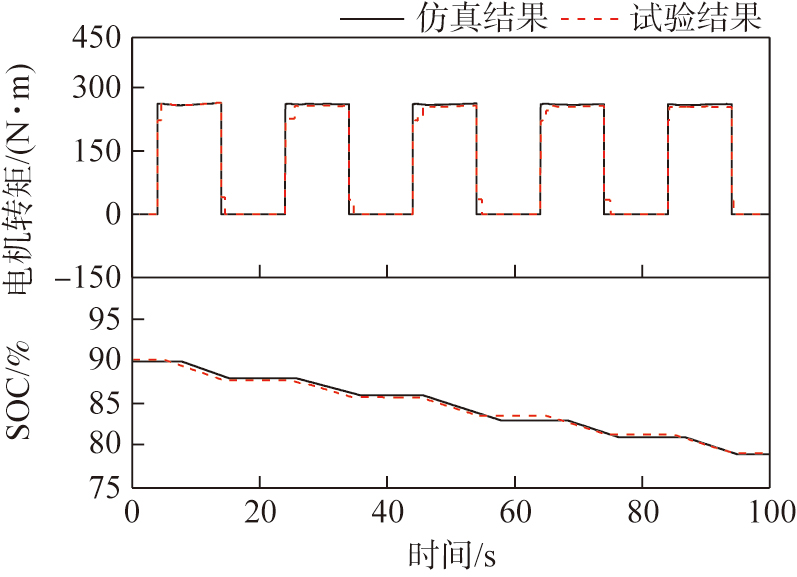
图13 ISG电机驱动测试仿真与试验结果对比
Fig.13 Comparison of simulated and experimental results of ISG motor driving test
| 主要参数 | RMSE/% |
|---|---|
| 电机转矩 | 6.09 |
| 电池SOC | 0.37 |
表3 电池与电机主要参数RMSE百分数统计
Table 3 RMSE% statistics for key parameters of motor and battery
| 主要参数 | RMSE/% |
|---|---|
| 电机转矩 | 6.09 |
| 电池SOC | 0.37 |

图14 车辆起步、加速过程仿真与试验结果对比
Fig.14 Comparison of simulated and experimental results of vehicle launch and acceleration process
| 主要参数 | RMSE/% |
|---|---|
| 车速 | 5.08 |
| 发动机转速 | 2.93 |
| 循环喷油量 | 5.84 |
| 进气压力 | 4.53 |
表4 起步、加速过程参数RMSE百分数统计
Table 4 RMSE% statistics of parameters in vehicle launch and acceleration process
| 主要参数 | RMSE/% |
|---|---|
| 车速 | 5.08 |
| 发动机转速 | 2.93 |
| 循环喷油量 | 5.84 |
| 进气压力 | 4.53 |
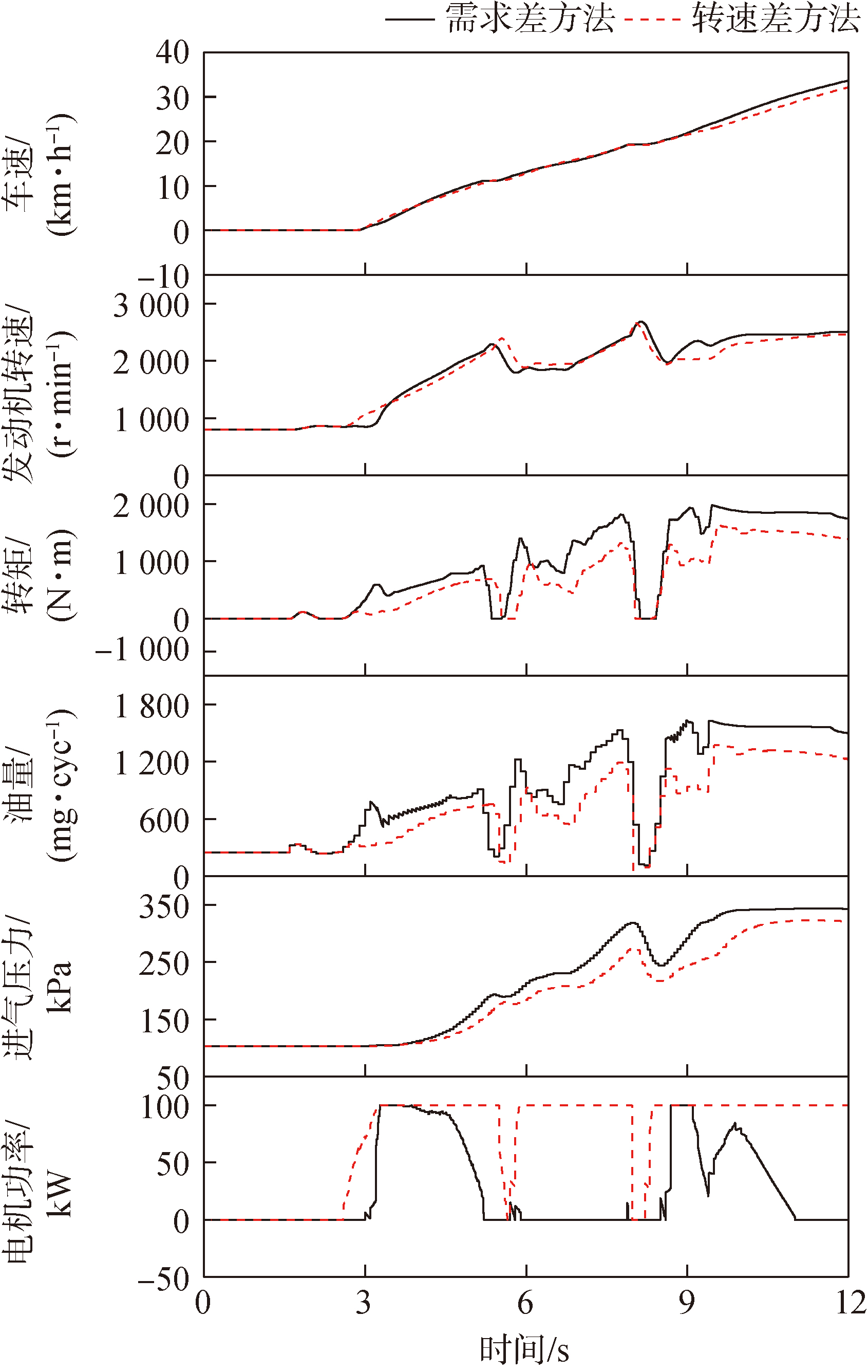
图15 车辆起步、加速过程主要参数仿真结果对比
Fig.15 Comparison of primary parameters of vehicle launch and acceleration process in simulation
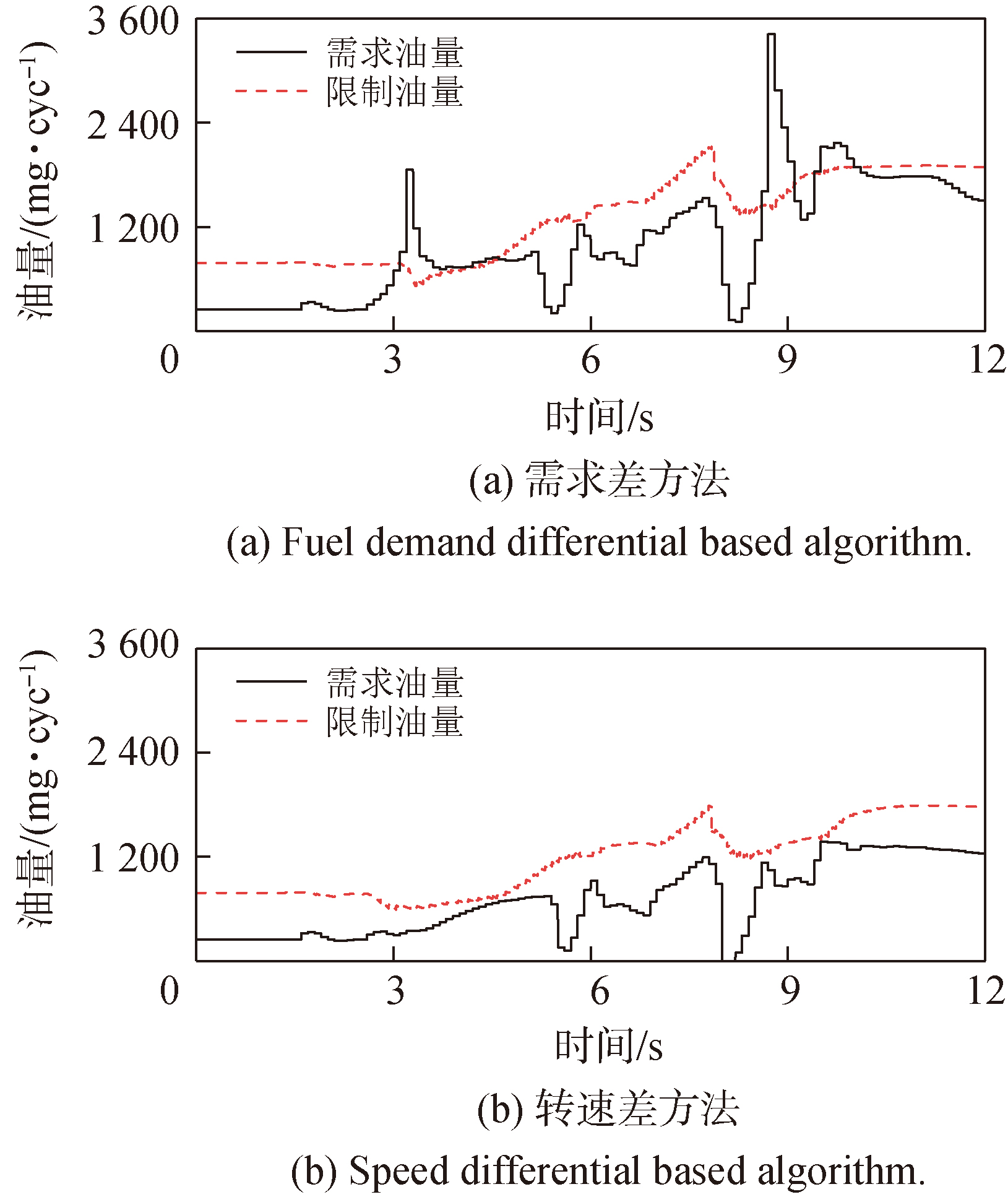
图16 车辆起步、加速过程油量参数仿真结果对比
Fig.16 Comparison of fuel parameters simulation results in vehicle launch and acceleration process
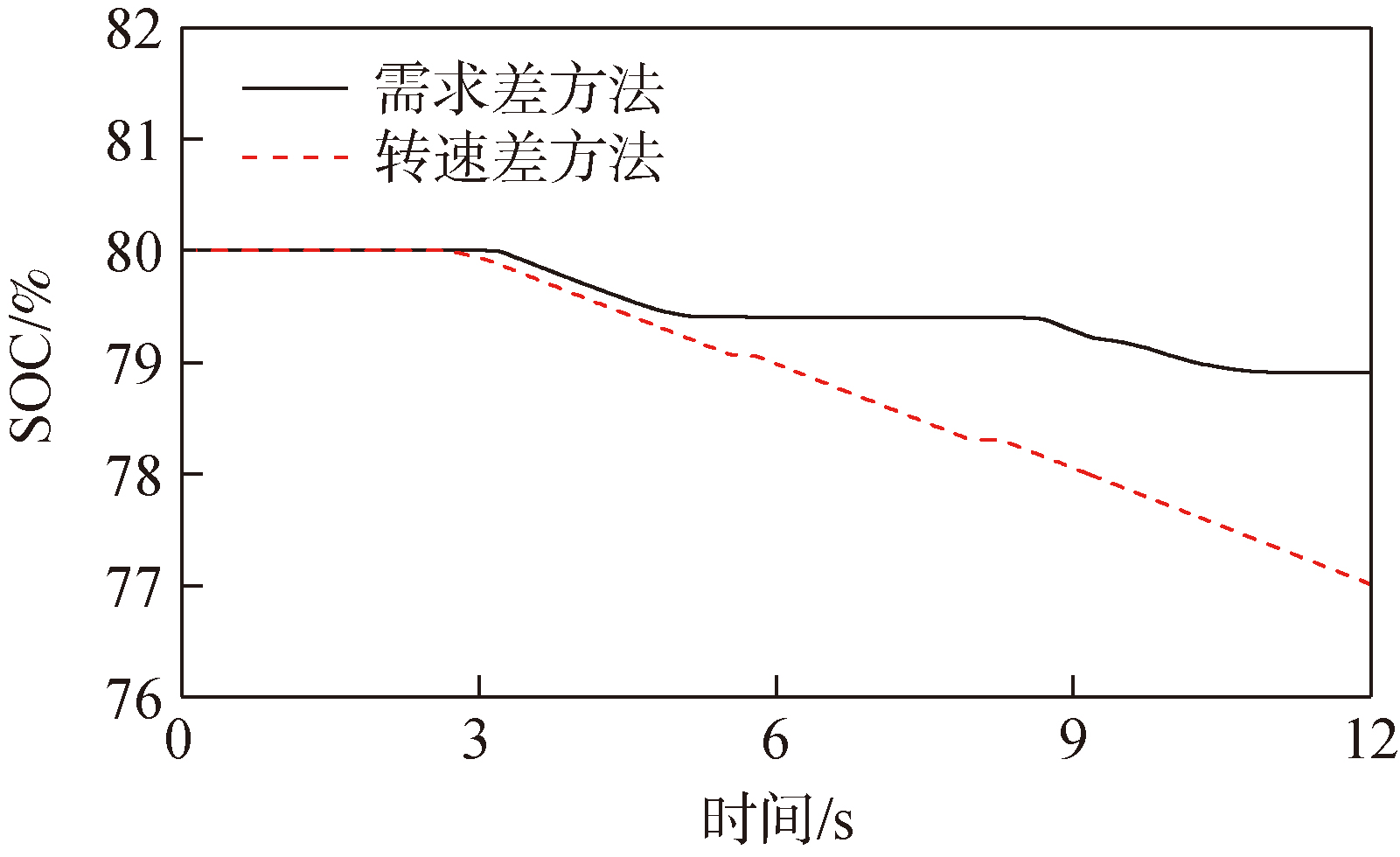
图17 车辆起步、加速过程SOC仿真结果对比
Fig.17 Comparison of SOC simulation results in vehicle launch and acceleration process
| 控制方法 | 柴油机燃油 消耗量/kg | 电能消耗量/ (kW·h) | 等效燃油 消耗量/kg | 综合燃油消 耗量/kg |
|---|---|---|---|---|
| 需求差方法 | 0.185 | 0.087 | 0.028 | 0.213 |
| 转速差方法 | 0.140 | 0.24 | 0.077 | 0.217 |
表5 车辆起步、加速过程燃油及电能消耗量仿真结果统计
Table 5 Statistics of simulated fuel and electricity consumption results in vehicle launch and acceleration process
| 控制方法 | 柴油机燃油 消耗量/kg | 电能消耗量/ (kW·h) | 等效燃油 消耗量/kg | 综合燃油消 耗量/kg |
|---|---|---|---|---|
| 需求差方法 | 0.185 | 0.087 | 0.028 | 0.213 |
| 转速差方法 | 0.140 | 0.24 | 0.077 | 0.217 |
| 项目 | 柴油机相对 负荷率/% | 电能消耗量/ (kW·h) | 综合燃油消 耗量/kg | 0~32km/h 加速时间/s |
|---|---|---|---|---|
| 需求差方法 | 76.30 | 0.087 | 0.213 | 8.6 |
| 转速差方法 | 63.92 | 0.24 | 0.217 | 9.2 |
| 改进效果 | 升高 19.37% | 减少 63.75% | 减少 1.84% | 减少 6.52% |
表6 车辆起步、加速过程主要性能指标仿真结果统计
Table 6 Simulated results of main performance index in vehicle launch and acceleration process
| 项目 | 柴油机相对 负荷率/% | 电能消耗量/ (kW·h) | 综合燃油消 耗量/kg | 0~32km/h 加速时间/s |
|---|---|---|---|---|
| 需求差方法 | 76.30 | 0.087 | 0.213 | 8.6 |
| 转速差方法 | 63.92 | 0.24 | 0.217 | 9.2 |
| 改进效果 | 升高 19.37% | 减少 63.75% | 减少 1.84% | 减少 6.52% |
| [1] |
宋德祥, 李志鹏, 李睿, 等. 加载条件对柴油机瞬态响应的影响研究[J]. 车用发动机, 2023, 264(1):6-12.
|
|
|
|
| [2] |
黄绵敦, 张付军, 崔涛, 等. 重载越野车辆高原起步响应性研究[J]. 兵工学报, 2016, 37(10):1915-1925.
doi: 10.3969/j.issn.1000-1093.2016.10.019 |
|
|
|
| [3] |
段军涛, 戴旭, 邓瑞, 等. 采用液力自动变速器的越野车辆高原坡道起步能力研究[J]. 汽车科技, 2025,(1):2-7.
|
|
|
|
| [4] |
许宏昌, 洪万年. 针对高原环境下车辆起步困难问题的研究[J]. 车辆与动力技术, 2015, 137(1):24-26.
|
|
|
|
| [5] |
平衍, 陈涛, 展新, 等. 并联式混合动力自卸车控制策略与经济性研究[J]. 汽车实用技术, 2024, 49(11):22-28.
doi: 10.16638/j.cnki.1671-7988.2024.011.005 |
|
doi: 10.16638/j.cnki.1671-7988.2024.011.005 |
|
| [6] |
|
| [7] |
童毅. 并联式混合动力系统动态协调控制问题的研究[D]. 北京: 清华大学,2004:7-44.
|
|
|
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
商显赫, 张付军, 吕航, 等. 提升重型车辆起步性能协调控制策略[J]. 兵工学报, 2024, 45(1):264-275.
doi: 10.12382/bgxb.2023.0340 |
|
doi: 10.12382/bgxb.2023.0340 |
|
| [16] |
吕航, 商显赫, 赵长禄, 等. 弱混车辆分层约束的能量协调控制策略[J]. 机械工程学报, 2025, 61(6):268-276.
|
|
|
|
| [17] |
申立忠, 文洁, 王正江, 等. 烟度限制策略对柴油机瞬态性能的影响研究[J]. 车用发动机, 2021, 257(6):9-15.
|
|
|
|
| [18] |
王浩. 并联混合动力客车驱动模式切换扭矩协调控制算法研究[D]. 长春: 吉林大学,2013:19-27.
|
|
|
|
| [19] |
|
| [20] |
万国强. 换挡过程动力传动系统协调控制[D]. 北京: 北京理工大学,2012:31-43.
|
|
|
|
| [21] |
李剑锋, 范知友, 范凤鸣. 履带车辆运动阻力系数及行动系统效率分析[J]. 车辆与动力技术, 2015, 139(3):1-4,9.
|
|
|
|
| [22] |
|
| [1] | 生辉, 盖江涛, 李春明, 杜明刚, 帅志斌. 高速电驱动履带车辆联合制动转矩动态协调控制研究[J]. 兵工学报, 2017, 38(5): 1027-1034. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||
 京公网安备11010802024360号 京ICP备05059581号-4
京公网安备11010802024360号 京ICP备05059581号-4